 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnvironment Modeling for Service Robots From a Task Execution Perspective
Jan 10, 2025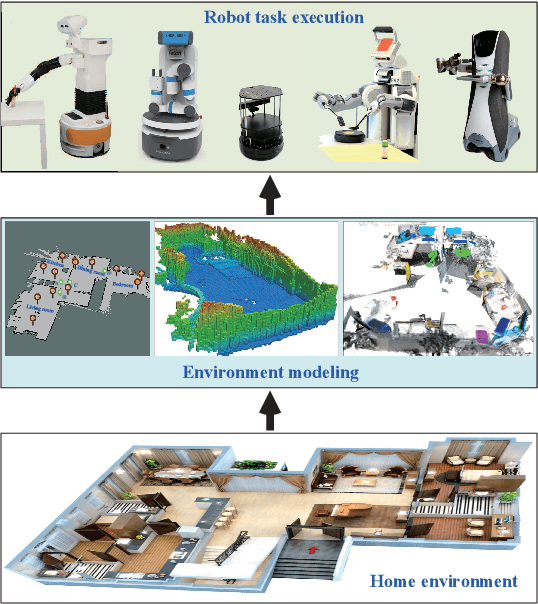
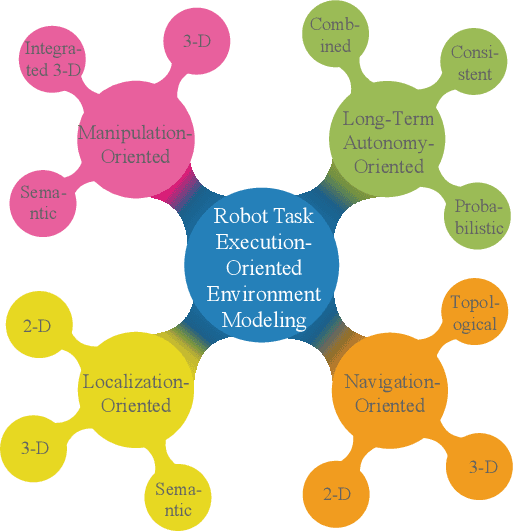
Service robots are increasingly entering the home to provide domestic tasks for residents. However, when working in an open, dynamic, and unstructured home environment, service robots still face challenges such as low intelligence for task execution and poor long-term autonomy (LTA), which has limited their deployment. As the basis of robotic task execution, environment modeling has attracted significant attention. This integrates core technologies such as environment perception, understanding, and representation to accurately recognize environmental information. This paper presents a comprehensive survey of environmental modeling from a new task-executionoriented perspective. In particular, guided by the requirements of robots in performing domestic service tasks in the home environment, we systematically review the progress that has been made in task-execution-oriented environmental modeling in four respects: 1) localization, 2) navigation, 3) manipulation, and 4) LTA. Current challenges are discussed, and potential research opportunities are also highlighted.
* 16 pages, 9 figures; This article has been accepted for publication in a future issue of IEEE/CAA Journal of Automatica Sinica, but has not been fully edited. Content may change prior to final publication
A New Clustering-based View Planning Method for Building Inspection with Drone
Jul 19, 2024



With the rapid development of drone technology, the application of drones equipped with visual sensors for building inspection and surveillance has attracted much attention. View planning aims to find a set of near-optimal viewpoints for vision-related tasks to achieve the vision coverage goal. This paper proposes a new clustering-based two-step computational method using spectral clustering, local potential field method, and hyper-heuristic algorithm to find near-optimal views to cover the target building surface. In the first step, the proposed method generates candidate viewpoints based on spectral clustering and corrects the positions of candidate viewpoints based on our newly proposed local potential field method. In the second step, the optimization problem is converted into a Set Covering Problem (SCP), and the optimal viewpoint subset is solved using our proposed hyper-heuristic algorithm. Experimental results show that the proposed method is able to obtain better solutions with fewer viewpoints and higher coverage.
Digital Twin System for Home Service Robot Based on Motion Simulation
Sep 12, 2023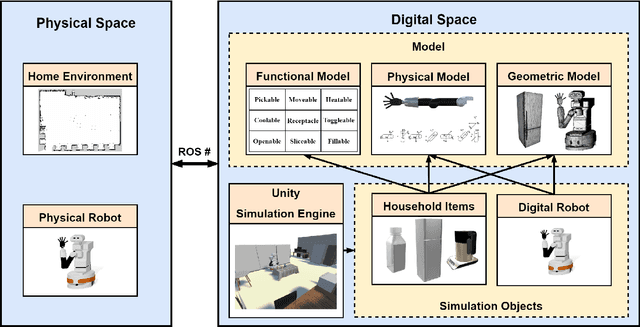
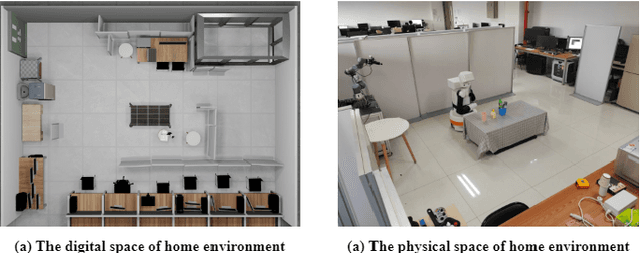
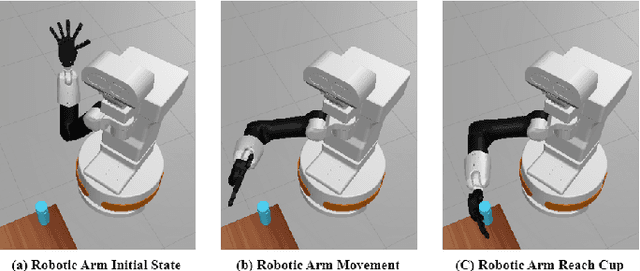
In order to improve the task execution capability of home service robot, and to cope with the problem that purely physical robot platforms cannot sense the environment and make decisions online, a method for building digital twin system for home service robot based on motion simulation is proposed. A reliable mapping of the home service robot and its working environment from physical space to digital space is achieved in three dimensions: geometric, physical and functional. In this system, a digital space-oriented URDF file parser is designed and implemented for the automatic construction of the robot geometric model. Next, the physical model is constructed from the kinematic equations of the robot and an improved particle swarm optimization algorithm is proposed for the inverse kinematic solution. In addition, to adapt to the home environment, functional attributes are used to describe household objects, thus improving the semantic description of the digital space for the real home environment. Finally, through geometric model consistency verification, physical model validity verification and virtual-reality consistency verification, it shows that the digital twin system designed in this paper can construct the robot geometric model accurately and completely, complete the operation of household objects successfully, and the digital twin system is effective and practical.
Memory Group Sampling Based Online Action Recognition Using Kinetic Skeleton Features
Nov 03, 2020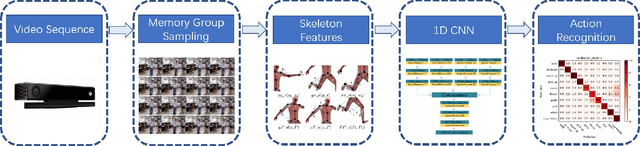
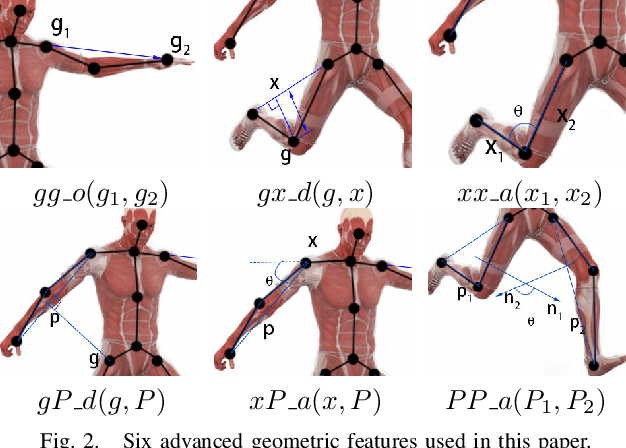
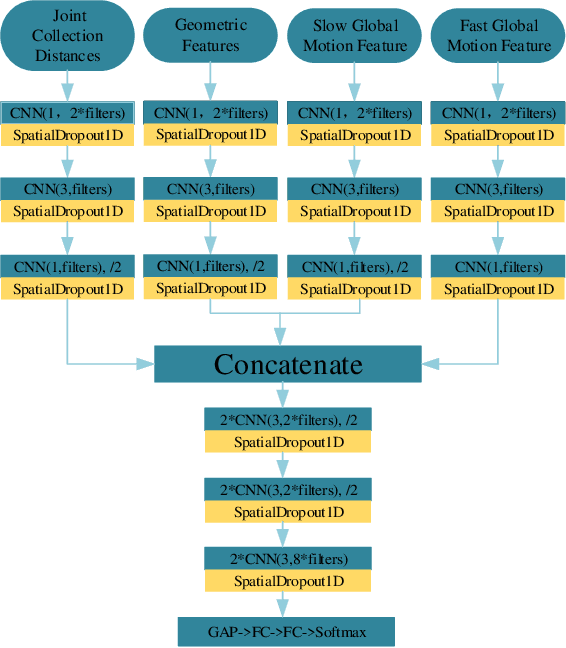
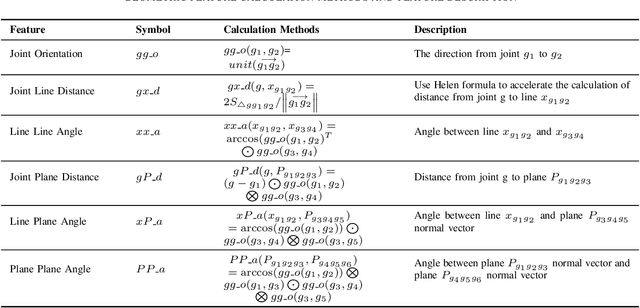
Online action recognition is an important task for human centered intelligent services, which is still difficult to achieve due to the varieties and uncertainties of spatial and temporal scales of human actions. In this paper, we propose two core ideas to handle the online action recognition problem. First, we combine the spatial and temporal skeleton features to depict the actions, which include not only the geometrical features, but also multi-scale motion features, such that both the spatial and temporal information of the action are covered. Second, we propose a memory group sampling method to combine the previous action frames and current action frames, which is based on the truth that the neighbouring frames are largely redundant, and the sampling mechanism ensures that the long-term contextual information is also considered. Finally, an improved 1D CNN network is employed for training and testing using the features from sampled frames. The comparison results to the state of the art methods using the public datasets show that the proposed method is fast and efficient, and has competitive performance
Motion Planning Combines Psychological Safety and Motion Prediction for a Sense Motive Robot
Oct 23, 2020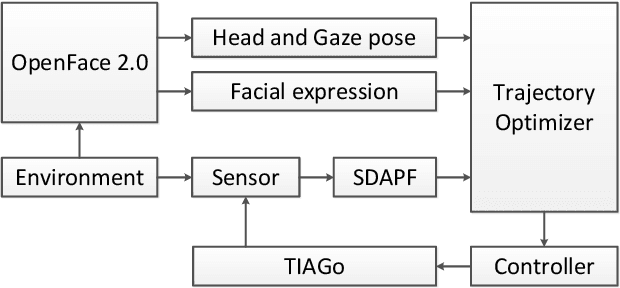
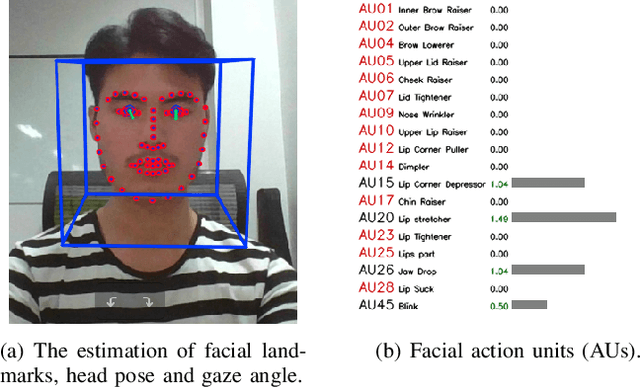
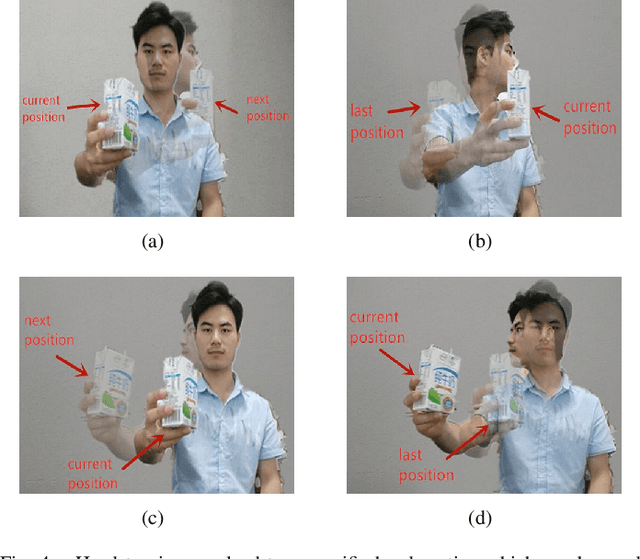
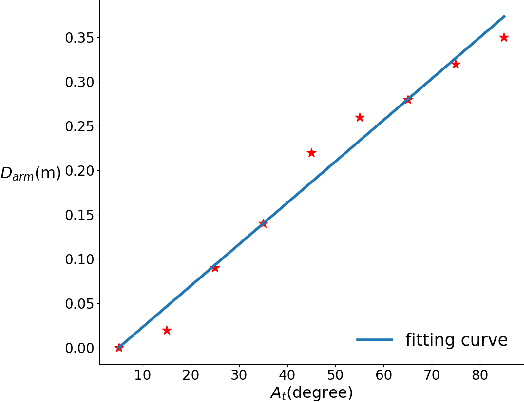
Human safety is the most important demand for human robot interaction and collaboration (HRIC), which not only refers to physical safety, but also includes psychological safety. Although many robots with different configurations have entered our living and working environments, the human safety problem is still an ongoing research problem in human-robot coexistence scenarios. This paper addresses the human safety issue by covering both the physical safety and psychological safety aspects. First, we introduce an adaptive robot velocity control and step size adjustment method according to human facial expressions, such that the robot can adjust its movement to keep safety when the human emotion is unusual. Second, we predict the human motion by detecting the suddenly changes of human head pose and gaze direction, such that the robot can infer whether the human attention is distracted, predict the next move of human and rebuild a repulsive force to avoid potential collision. Finally, we demonstrate our idea using a 7 DOF TIAGo robot in a dynamic HRIC environment, which shows that the robot becomes sense motive, and responds to human action and emotion changes quickly and efficiently.