 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZISVFM: Zero-Shot Object Instance Segmentation in Indoor Robotic Environments with Vision Foundation Models
Feb 05, 2025



Service robots operating in unstructured environments must effectively recognize and segment unknown objects to enhance their functionality. Traditional supervised learningbased segmentation techniques require extensive annotated datasets, which are impractical for the diversity of objects encountered in real-world scenarios. Unseen Object Instance Segmentation (UOIS) methods aim to address this by training models on synthetic data to generalize to novel objects, but they often suffer from the simulation-to-reality gap. This paper proposes a novel approach (ZISVFM) for solving UOIS by leveraging the powerful zero-shot capability of the segment anything model (SAM) and explicit visual representations from a selfsupervised vision transformer (ViT). The proposed framework operates in three stages: (1) generating object-agnostic mask proposals from colorized depth images using SAM, (2) refining these proposals using attention-based features from the selfsupervised ViT to filter non-object masks, and (3) applying K-Medoids clustering to generate point prompts that guide SAM towards precise object segmentation. Experimental validation on two benchmark datasets and a self-collected dataset demonstrates the superior performance of ZISVFM in complex environments, including hierarchical settings such as cabinets, drawers, and handheld objects. Our source code is available at https://github.com/Yinmlmaoliang/zisvfm.
Environment Modeling for Service Robots From a Task Execution Perspective
Jan 10, 2025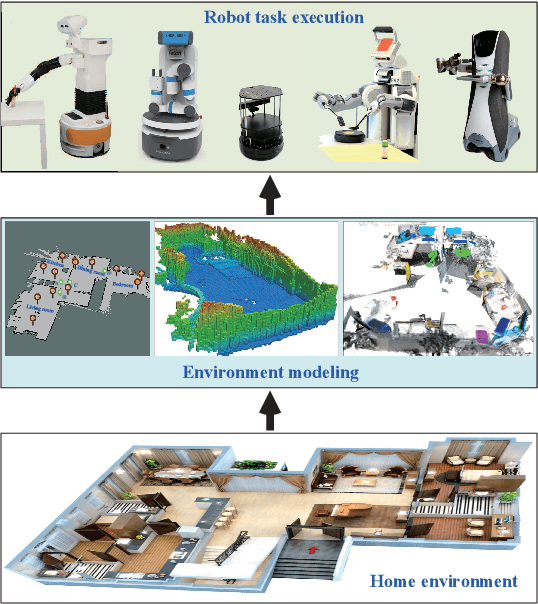
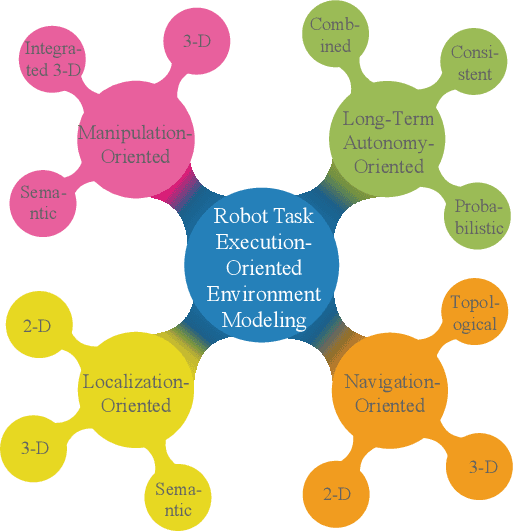
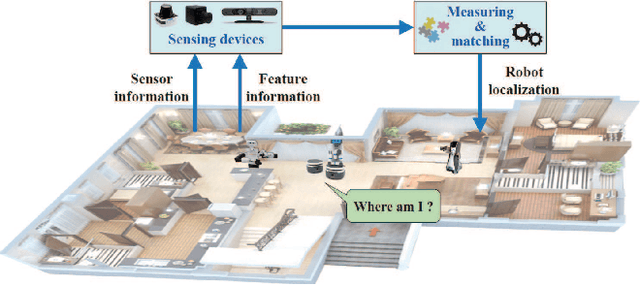
Service robots are increasingly entering the home to provide domestic tasks for residents. However, when working in an open, dynamic, and unstructured home environment, service robots still face challenges such as low intelligence for task execution and poor long-term autonomy (LTA), which has limited their deployment. As the basis of robotic task execution, environment modeling has attracted significant attention. This integrates core technologies such as environment perception, understanding, and representation to accurately recognize environmental information. This paper presents a comprehensive survey of environmental modeling from a new task-executionoriented perspective. In particular, guided by the requirements of robots in performing domestic service tasks in the home environment, we systematically review the progress that has been made in task-execution-oriented environmental modeling in four respects: 1) localization, 2) navigation, 3) manipulation, and 4) LTA. Current challenges are discussed, and potential research opportunities are also highlighted.
* 16 pages, 9 figures; This article has been accepted for publication in a future issue of IEEE/CAA Journal of Automatica Sinica, but has not been fully edited. Content may change prior to final publication
Air-Ground Collaborative Robots for Fire and Rescue Missions: Towards Mapping and Navigation Perspective
Dec 30, 2024Air-ground collaborative robots have shown great potential in the field of fire and rescue, which can quickly respond to rescue needs and improve the efficiency of task execution. Mapping and navigation, as the key foundation for air-ground collaborative robots to achieve efficient task execution, have attracted a great deal of attention. This growing interest in collaborative robot mapping and navigation is conducive to improving the intelligence of fire and rescue task execution, but there has been no comprehensive investigation of this field to highlight their strengths. In this paper, we present a systematic review of the ground-to-ground cooperative robots for fire and rescue from a new perspective of mapping and navigation. First, an air-ground collaborative robots framework for fire and rescue missions based on unmanned aerial vehicle (UAV) mapping and unmanned ground vehicle (UGV) navigation is introduced. Then, the research progress of mapping and navigation under this framework is systematically summarized, including UAV mapping, UAV/UGV co-localization, and UGV navigation, with their main achievements and limitations. Based on the needs of fire and rescue missions, the collaborative robots with different numbers of UAVs and UGVs are classified, and their practicality in fire and rescue tasks is elaborated, with a focus on the discussion of their merits and demerits. In addition, the application examples of air-ground collaborative robots in various firefighting and rescue scenarios are given. Finally, this paper emphasizes the current challenges and potential research opportunities, rounding up references for practitioners and researchers willing to engage in this vibrant area of air-ground collaborative robots.