 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZISVFM: Zero-Shot Object Instance Segmentation in Indoor Robotic Environments with Vision Foundation Models
Feb 05, 2025



Service robots operating in unstructured environments must effectively recognize and segment unknown objects to enhance their functionality. Traditional supervised learningbased segmentation techniques require extensive annotated datasets, which are impractical for the diversity of objects encountered in real-world scenarios. Unseen Object Instance Segmentation (UOIS) methods aim to address this by training models on synthetic data to generalize to novel objects, but they often suffer from the simulation-to-reality gap. This paper proposes a novel approach (ZISVFM) for solving UOIS by leveraging the powerful zero-shot capability of the segment anything model (SAM) and explicit visual representations from a selfsupervised vision transformer (ViT). The proposed framework operates in three stages: (1) generating object-agnostic mask proposals from colorized depth images using SAM, (2) refining these proposals using attention-based features from the selfsupervised ViT to filter non-object masks, and (3) applying K-Medoids clustering to generate point prompts that guide SAM towards precise object segmentation. Experimental validation on two benchmark datasets and a self-collected dataset demonstrates the superior performance of ZISVFM in complex environments, including hierarchical settings such as cabinets, drawers, and handheld objects. Our source code is available at https://github.com/Yinmlmaoliang/zisvfm.
Bi-AM-RRT*: A Fast and Efficient Sampling-Based Motion Planning Algorithm in Dynamic Environments
Jan 27, 2023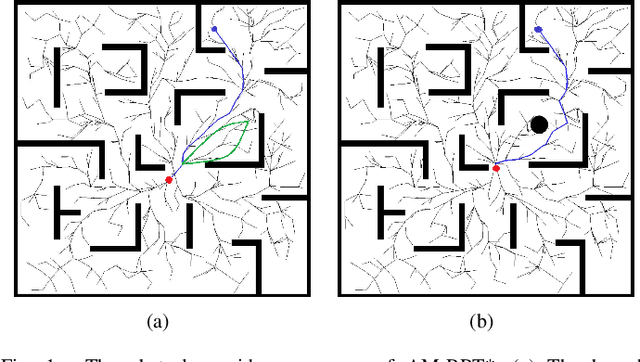
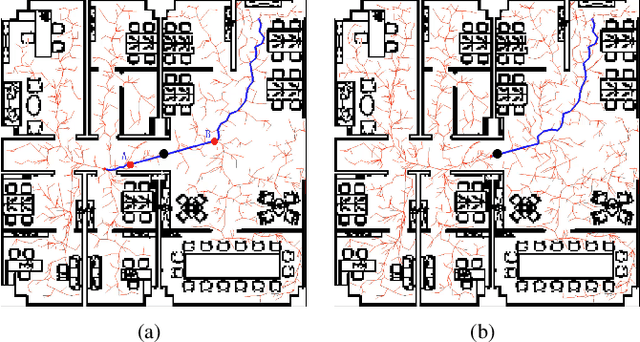
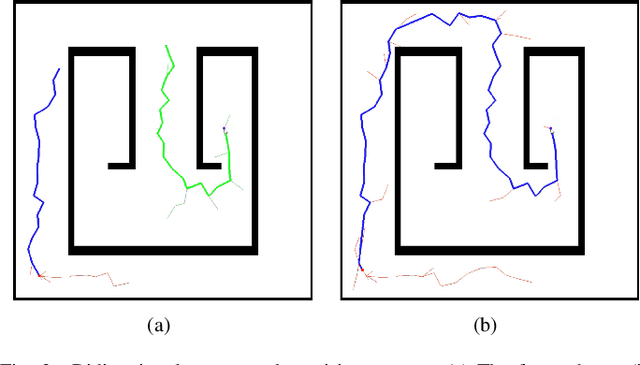
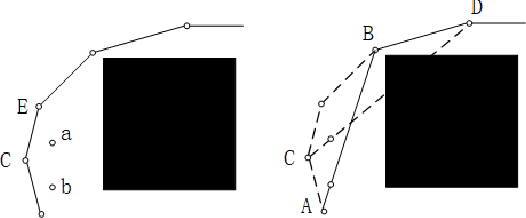
The efficiency of sampling-based motion planning brings wide application in autonomous mobile robots. Conventional rapidly exploring random tree (RRT) algorithm and its variants have gained great successes, but there are still challenges for the real-time optimal motion planning of mobile robots in dynamic environments. In this paper, based on Bidirectional RRT (Bi-RRT) and the use of an assisting metric (AM), we propose a novel motion planning algorithm, namely Bi-AM-RRT*. Different from the existing RRT-based methods, the AM is introduced in this paper to optimize the performance of robot motion planning in dynamic environments with obstacles. On this basis, the bidirectional search sampling strategy is employed, in order to increase the planning efficiency. Further, we present an improved rewiring method to shorten path lengths. The effectiveness and efficiency of the proposed Bi-AM-RRT* are proved through comparative experiments in different environments. Experimental results show that the Bi-AM-RRT* algorithm can achieve better performance in terms of path length and search time.