 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Planning Combines Psychological Safety and Motion Prediction for a Sense Motive Robot
Paper and Code
Oct 23, 2020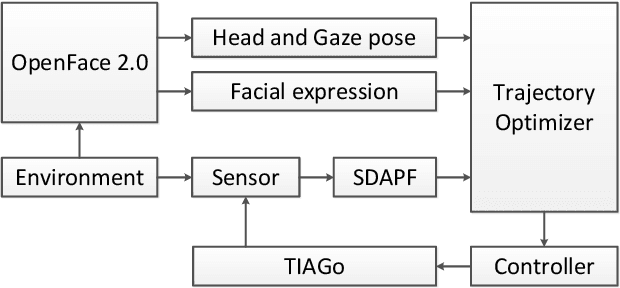
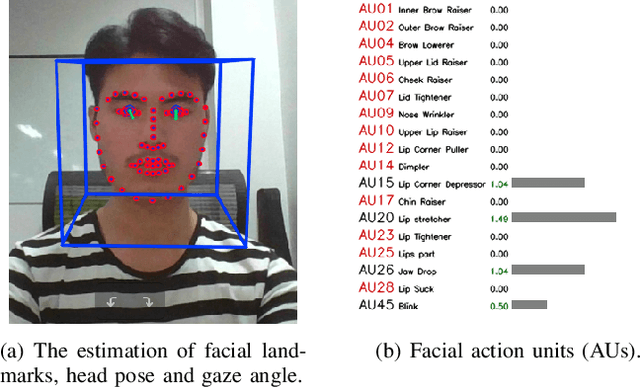
Human safety is the most important demand for human robot interaction and collaboration (HRIC), which not only refers to physical safety, but also includes psychological safety. Although many robots with different configurations have entered our living and working environments, the human safety problem is still an ongoing research problem in human-robot coexistence scenarios. This paper addresses the human safety issue by covering both the physical safety and psychological safety aspects. First, we introduce an adaptive robot velocity control and step size adjustment method according to human facial expressions, such that the robot can adjust its movement to keep safety when the human emotion is unusual. Second, we predict the human motion by detecting the suddenly changes of human head pose and gaze direction, such that the robot can infer whether the human attention is distracted, predict the next move of human and rebuild a repulsive force to avoid potential collision. Finally, we demonstrate our idea using a 7 DOF TIAGo robot in a dynamic HRIC environment, which shows that the robot becomes sense motive, and responds to human action and emotion changes quickly and efficiently.