 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAED-PADA:Improving Generalizability of Adversarial Example Detection via Principal Adversarial Domain Adaptation
Apr 19, 2024Adversarial example detection, which can be conveniently applied in many scenarios, is important in the area of adversarial defense. Unfortunately, existing detection methods suffer from poor generalization performance, because their training process usually relies on the examples generated from a single known adversarial attack and there exists a large discrepancy between the training and unseen testing adversarial examples. To address this issue, we propose a novel method, named Adversarial Example Detection via Principal Adversarial Domain Adaptation (AED-PADA). Specifically, our approach identifies the Principal Adversarial Domains (PADs), i.e., a combination of features of the adversarial examples from different attacks, which possesses large coverage of the entire adversarial feature space. Then, we pioneer to exploit multi-source domain adaptation in adversarial example detection with PADs as source domains. Experiments demonstrate the superior generalization ability of our proposed AED-PADA. Note that this superiority is particularly achieved in challenging scenarios characterized by employing the minimal magnitude constraint for the perturbations.
LSP Framework: A Compensatory Model for Defeating Trigger Reverse Engineering via Label Smoothing Poisoning
Apr 19, 2024Deep neural networks are vulnerable to backdoor attacks. Among the existing backdoor defense methods, trigger reverse engineering based approaches, which reconstruct the backdoor triggers via optimizations, are the most versatile and effective ones compared to other types of methods. In this paper, we summarize and construct a generic paradigm for the typical trigger reverse engineering process. Based on this paradigm, we propose a new perspective to defeat trigger reverse engineering by manipulating the classification confidence of backdoor samples. To determine the specific modifications of classification confidence, we propose a compensatory model to compute the lower bound of the modification. With proper modifications, the backdoor attack can easily bypass the trigger reverse engineering based methods. To achieve this objective, we propose a Label Smoothing Poisoning (LSP) framework, which leverages label smoothing to specifically manipulate the classification confidences of backdoor samples. Extensive experiments demonstrate that the proposed work can defeat the state-of-the-art trigger reverse engineering based methods, and possess good compatibility with a variety of existing backdoor attacks.
Computational Discovery of Microstructured Composites with Optimal Strength-Toughness Trade-Offs
Feb 01, 2023The conflict between strength and toughness is a fundamental problem in engineering materials design. However, systematic discovery of microstructured composites with optimal strength-toughness trade-offs has never been demonstrated due to the discrepancies between simulation and reality and the lack of data-efficient exploration of the entire Pareto front. Here, we report a widely applicable pipeline harnessing physical experiments, numerical simulations, and artificial neural networks to efficiently discover microstructured designs that are simultaneously tough and strong. Using a physics-based simulator with moderate complexity, our strategy runs a data-driven proposal-validation workflow in a nested-loop fashion to bridge the gap between simulation and reality in high sample efficiency. Without any prescribed expert knowledge of materials design, our approach automatically identifies existing toughness enhancement mechanisms that were traditionally discovered through trial-and-error or biomimicry. We provide a blueprint for the computational discovery of optimal designs, which inverts traditional scientific approaches, and is applicable to a wide range of research problems beyond composites, including polymer chemistry, fluid dynamics, meteorology, and robotics.
Data-Efficient Graph Grammar Learning for Molecular Generation
Mar 15, 2022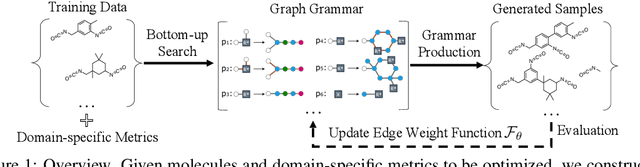
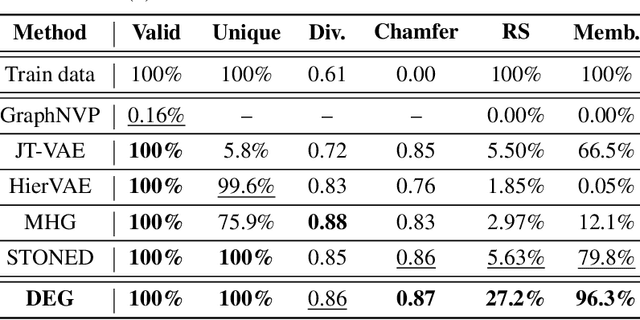
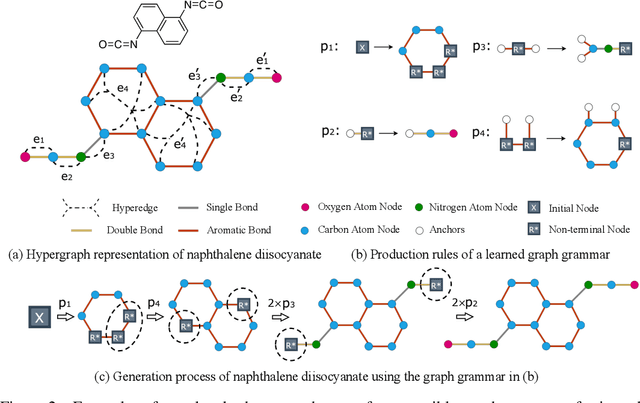
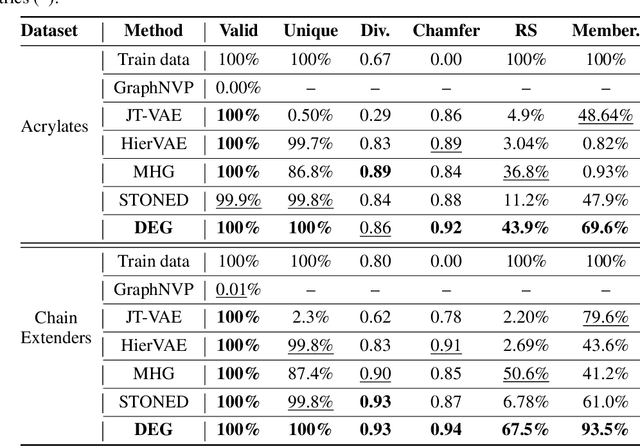
The problem of molecular generation has received significant attention recently. Existing methods are typically based on deep neural networks and require training on large datasets with tens of thousands of samples. In practice, however, the size of class-specific chemical datasets is usually limited (e.g., dozens of samples) due to labor-intensive experimentation and data collection. This presents a considerable challenge for the deep learning generative models to comprehensively describe the molecular design space. Another major challenge is to generate only physically synthesizable molecules. This is a non-trivial task for neural network-based generative models since the relevant chemical knowledge can only be extracted and generalized from the limited training data. In this work, we propose a data-efficient generative model that can be learned from datasets with orders of magnitude smaller sizes than common benchmarks. At the heart of this method is a learnable graph grammar that generates molecules from a sequence of production rules. Without any human assistance, these production rules are automatically constructed from training data. Furthermore, additional chemical knowledge can be incorporated in the model by further grammar optimization. Our learned graph grammar yields state-of-the-art results on generating high-quality molecules for three monomer datasets that contain only ${\sim}20$ samples each. Our approach also achieves remarkable performance in a challenging polymer generation task with only $117$ training samples and is competitive against existing methods using $81$k data points. Code is available at https://github.com/gmh14/data_efficient_grammar.
Designing Composites with Target Effective Young's Modulus using Reinforcement Learning
Oct 07, 2021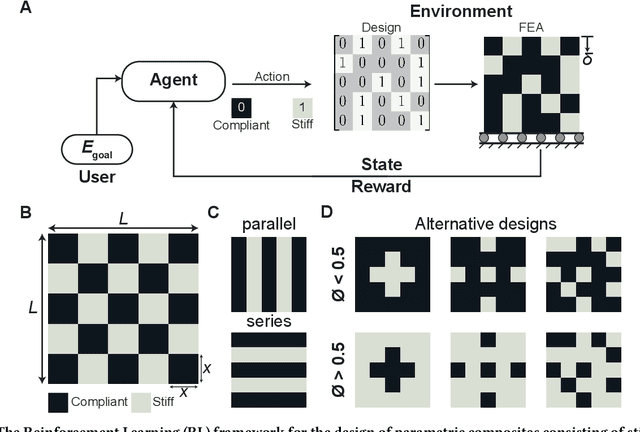
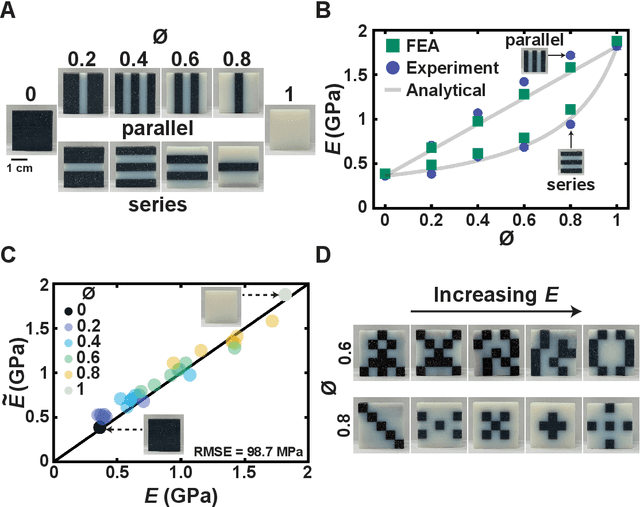
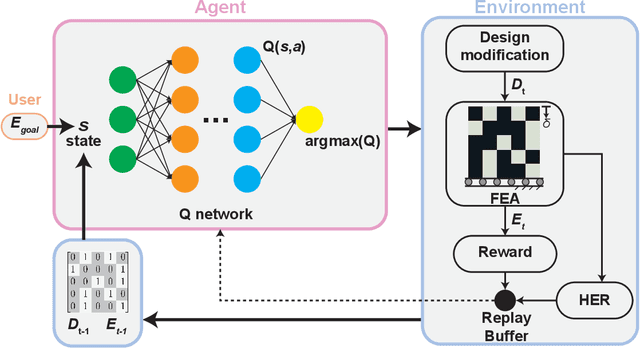

Advancements in additive manufacturing have enabled design and fabrication of materials and structures not previously realizable. In particular, the design space of composite materials and structures has vastly expanded, and the resulting size and complexity has challenged traditional design methodologies, such as brute force exploration and one factor at a time (OFAT) exploration, to find optimum or tailored designs. To address this challenge, supervised machine learning approaches have emerged to model the design space using curated training data; however, the selection of the training data is often determined by the user. In this work, we develop and utilize a Reinforcement learning (RL)-based framework for the design of composite structures which avoids the need for user-selected training data. For a 5 $\times$ 5 composite design space comprised of soft and compliant blocks of constituent material, we find that using this approach, the model can be trained using 2.78% of the total design space consists of $2^{25}$ design possibilities. Additionally, the developed RL-based framework is capable of finding designs at a success rate exceeding 90%. The success of this approach motivates future learning frameworks to utilize RL for the design of composites and other material systems.
Learning to Reason in Round-based Games: Multi-task Sequence Generation for Purchasing Decision Making in First-person Shooters
Aug 12, 2020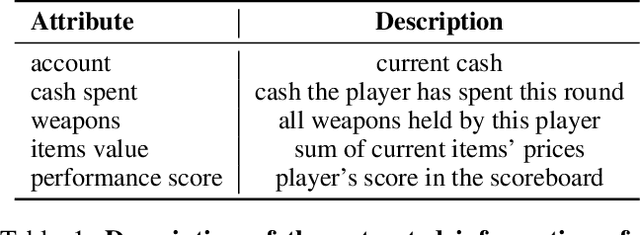
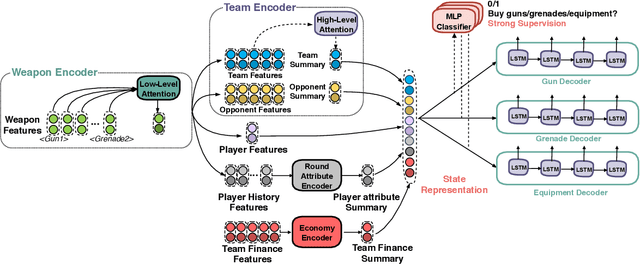
Sequential reasoning is a complex human ability, with extensive previous research focusing on gaming AI in a single continuous game, round-based decision makings extending to a sequence of games remain less explored. Counter-Strike: Global Offensive (CS:GO), as a round-based game with abundant expert demonstrations, provides an excellent environment for multi-player round-based sequential reasoning. In this work, we propose a Sequence Reasoner with Round Attribute Encoder and Multi-Task Decoder to interpret the strategies behind the round-based purchasing decisions. We adopt few-shot learning to sample multiple rounds in a match, and modified model agnostic meta-learning algorithm Reptile for the meta-learning loop. We formulate each round as a multi-task sequence generation problem. Our state representations combine action encoder, team encoder, player features, round attribute encoder, and economy encoders to help our agent learn to reason under this specific multi-player round-based scenario. A complete ablation study and comparison with the greedy approach certify the effectiveness of our model. Our research will open doors for interpretable AI for understanding episodic and long-term purchasing strategies beyond the gaming community.
Interactive Co-Design of Form and Function for Legged Robots using the Adjoint Method
Apr 16, 2018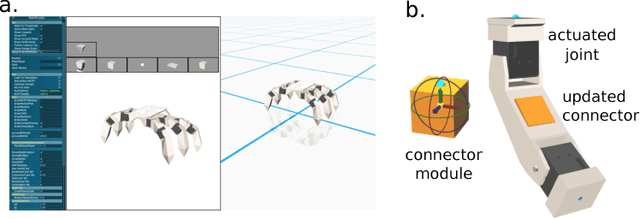

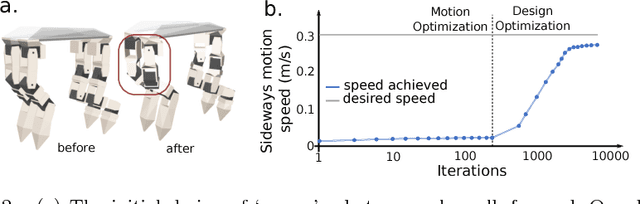
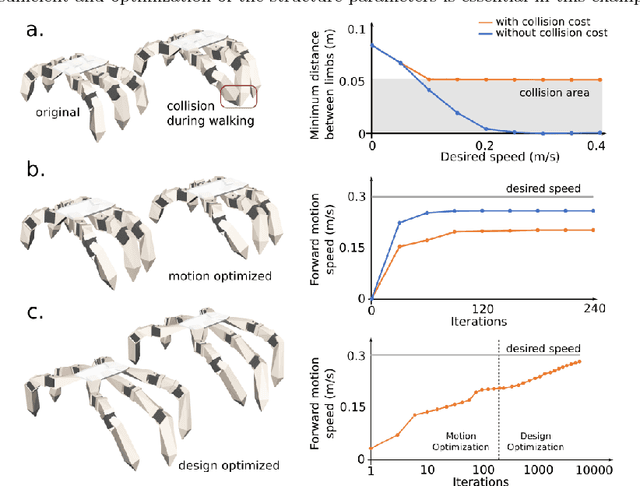
Our goal is to make robotics more accessible to casual users by reducing the domain knowledge required in designing and building robots. Towards this goal, we present an interactive computational design system that enables users to design legged robots with desired morphologies and behaviors by specifying higher level descriptions. The core of our method is a design optimization technique that reasons about the structure, and motion of a robot in coupled manner in order to achieve user-specified robot behavior, and performance. We are inspired by the recent works that also aim to jointly optimize robot's form and function. However, through efficient computation of necessary design changes, our approach enables us to keep user-in-the-loop for interactive applications. We evaluate our system in simulation by automatically improving robot designs for multiple scenarios. Starting with initial user designs that are physically infeasible or inadequate to perform the user-desired task, we show optimized designs that achieve user-specifications, all while ensuring an interactive design flow.