 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Nonlinear Deformation Design of 3D-Printable Shells
Aug 27, 2024



Designing and fabricating structures with specific mechanical properties requires understanding the intricate relationship between design parameters and performance. Understanding the design-performance relationship becomes increasingly complicated for nonlinear deformations. Though successful at modeling elastic deformations, simulation-based techniques struggle to model large elastoplastic deformations exhibiting plasticity and densification. We propose a neural network trained on experimental data to learn the design-performance relationship between 3D-printable shells and their compressive force-displacement behavior. Trained on thousands of physical experiments, our network aids in both forward and inverse design to generate shells exhibiting desired elastoplastic and hyperelastic deformations. We validate a subset of generated designs through fabrication and testing. Furthermore, we demonstrate the network's inverse design efficacy in generating custom shells for several applications.
Learning Based Toolpath Planner on Diverse Graphs for 3D Printing
Aug 17, 2024



This paper presents a learning based planner for computing optimized 3D printing toolpaths on prescribed graphs, the challenges of which include the varying graph structures on different models and the large scale of nodes & edges on a graph. We adopt an on-the-fly strategy to tackle these challenges, formulating the planner as a Deep Q-Network (DQN) based optimizer to decide the next `best' node to visit. We construct the state spaces by the Local Search Graph (LSG) centered at different nodes on a graph, which is encoded by a carefully designed algorithm so that LSGs in similar configurations can be identified to re-use the earlier learned DQN priors for accelerating the computation of toolpath planning. Our method can cover different 3D printing applications by defining their corresponding reward functions. Toolpath planning problems in wire-frame printing, continuous fiber printing, and metallic printing are selected to demonstrate its generality. The performance of our planner has been verified by testing the resultant toolpaths in physical experiments. By using our planner, wire-frame models with up to 4.2k struts can be successfully printed, up to 93.3% of sharp turns on continuous fiber toolpaths can be avoided, and the thermal distortion in metallic printing can be reduced by 24.9%.
Designing Composites with Target Effective Young's Modulus using Reinforcement Learning
Oct 07, 2021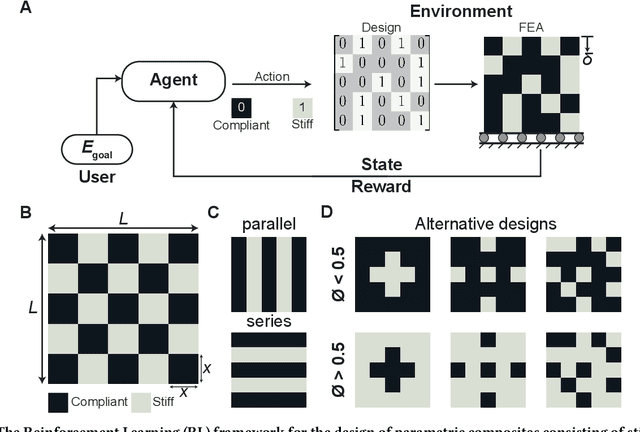
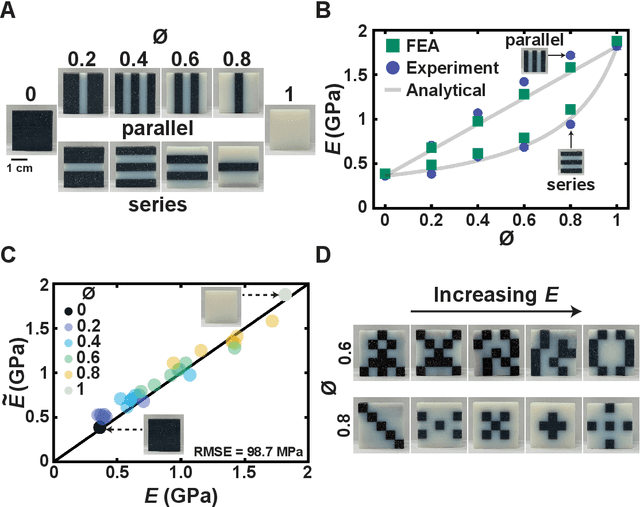
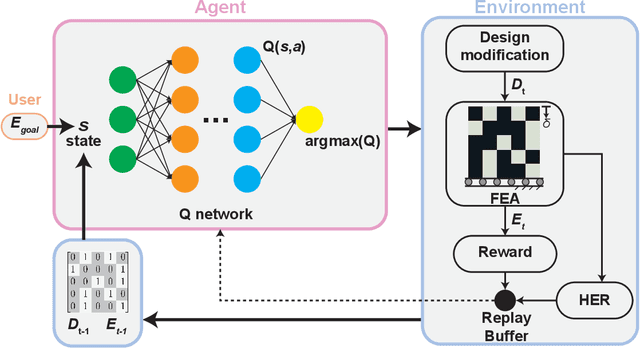

Advancements in additive manufacturing have enabled design and fabrication of materials and structures not previously realizable. In particular, the design space of composite materials and structures has vastly expanded, and the resulting size and complexity has challenged traditional design methodologies, such as brute force exploration and one factor at a time (OFAT) exploration, to find optimum or tailored designs. To address this challenge, supervised machine learning approaches have emerged to model the design space using curated training data; however, the selection of the training data is often determined by the user. In this work, we develop and utilize a Reinforcement learning (RL)-based framework for the design of composite structures which avoids the need for user-selected training data. For a 5 $\times$ 5 composite design space comprised of soft and compliant blocks of constituent material, we find that using this approach, the model can be trained using 2.78% of the total design space consists of $2^{25}$ design possibilities. Additionally, the developed RL-based framework is capable of finding designs at a success rate exceeding 90%. The success of this approach motivates future learning frameworks to utilize RL for the design of composites and other material systems.
PuzzleFlex: kinematic motion of chains with loose joints
Jun 20, 2019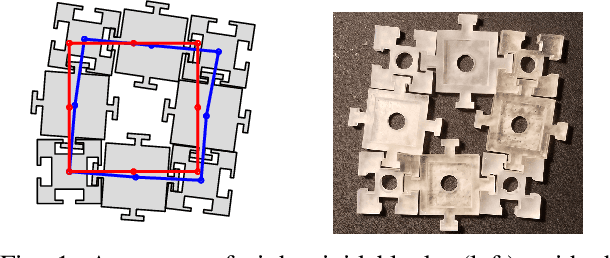
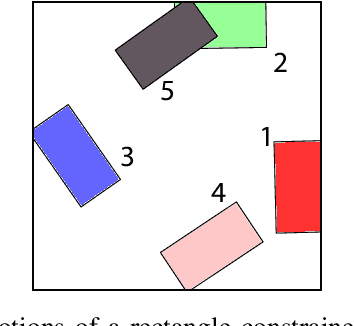

This paper presents a method of computing free motions of a planar assembly of rigid bodies connected by loose joints. Joints are modeled using local distance constraints, which are then linearized with respect to configuration space velocities, yielding a linear programming formulation that allows analysis of systems with thousands of rigid bodies. Potential applications include analysis of collections of modular robots, structural stability perturbation analysis, tolerance analysis for mechanical systems,and formation control of mobile robots.