 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerate Neural Subspace-Based Reduced-Order Solver of Deformable Simulation by Lipschitz Optimization
Sep 05, 2024



Reduced-order simulation is an emerging method for accelerating physical simulations with high DOFs, and recently developed neural-network-based methods with nonlinear subspaces have been proven effective in diverse applications as more concise subspaces can be detected. However, the complexity and landscape of simulation objectives within the subspace have not been optimized, which leaves room for enhancement of the convergence speed. This work focuses on this point by proposing a general method for finding optimized subspace mappings, enabling further acceleration of neural reduced-order simulations while capturing comprehensive representations of the configuration manifolds. We achieve this by optimizing the Lipschitz energy of the elasticity term in the simulation objective, and incorporating the cubature approximation into the training process to manage the high memory and time demands associated with optimizing the newly introduced energy. Our method is versatile and applicable to both supervised and unsupervised settings for optimizing the parameterizations of the configuration manifolds. We demonstrate the effectiveness of our approach through general cases in both quasi-static and dynamics simulations. Our method achieves acceleration factors of up to 6.83 while consistently preserving comparable simulation accuracy in various cases, including large twisting, bending, and rotational deformations with collision handling. This novel approach offers significant potential for accelerating physical simulations, and can be a good add-on to existing neural-network-based solutions in modeling complex deformable objects.
Learning Based Toolpath Planner on Diverse Graphs for 3D Printing
Aug 17, 2024



This paper presents a learning based planner for computing optimized 3D printing toolpaths on prescribed graphs, the challenges of which include the varying graph structures on different models and the large scale of nodes & edges on a graph. We adopt an on-the-fly strategy to tackle these challenges, formulating the planner as a Deep Q-Network (DQN) based optimizer to decide the next `best' node to visit. We construct the state spaces by the Local Search Graph (LSG) centered at different nodes on a graph, which is encoded by a carefully designed algorithm so that LSGs in similar configurations can be identified to re-use the earlier learned DQN priors for accelerating the computation of toolpath planning. Our method can cover different 3D printing applications by defining their corresponding reward functions. Toolpath planning problems in wire-frame printing, continuous fiber printing, and metallic printing are selected to demonstrate its generality. The performance of our planner has been verified by testing the resultant toolpaths in physical experiments. By using our planner, wire-frame models with up to 4.2k struts can be successfully printed, up to 93.3% of sharp turns on continuous fiber toolpaths can be avoided, and the thermal distortion in metallic printing can be reduced by 24.9%.
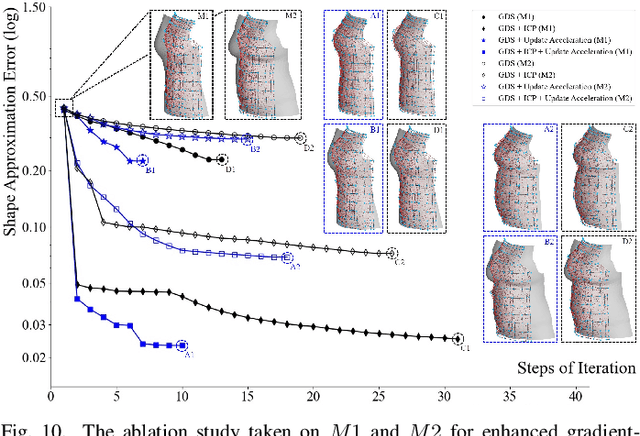
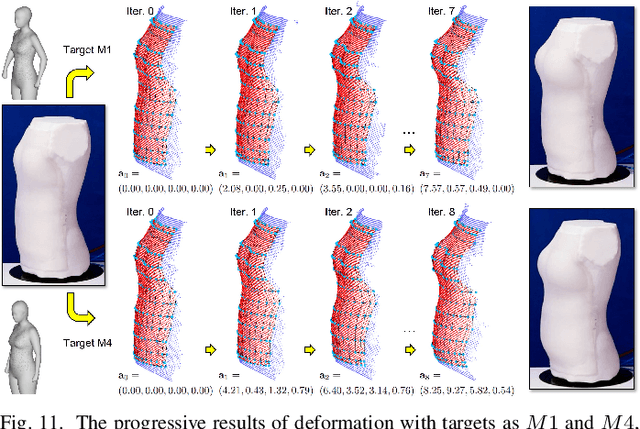
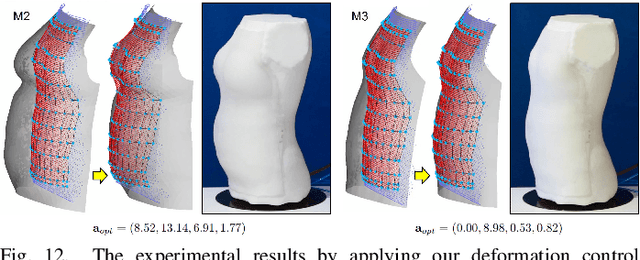
Function based sim-to-real learning for shape control of deformable free-form surfaces
May 14, 2024



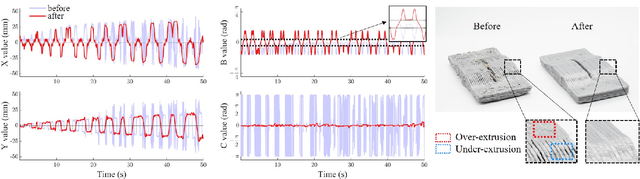
For the shape control of deformable free-form surfaces, simulation plays a crucial role in establishing the mapping between the actuation parameters and the deformed shapes. The differentiation of this forward kinematic mapping is usually employed to solve the inverse kinematic problem for determining the actuation parameters that can realize a target shape. However, the free-form surfaces obtained from simulators are always different from the physically deformed shapes due to the errors introduced by hardware and the simplification adopted in physical simulation. To fill the gap, we propose a novel deformation function based sim-to-real learning method that can map the geometric shape of a simulated model into its corresponding shape of the physical model. Unlike the existing sim-to-real learning methods that rely on completely acquired dense markers, our method accommodates sparsely distributed markers and can resiliently use all captured frames -- even for those in the presence of missing markers. To demonstrate its effectiveness, our sim-to-real method has been integrated into a neural network-based computational pipeline designed to tackle the inverse kinematic problem on a pneumatically actuated deformable mannequin.
Spring-IMU Fusion Based Proprioception for Feedback Control of Soft Manipulators
Sep 25, 2023This paper presents a novel framework to realize proprioception and closed-loop control for soft manipulators. Deformations with large elongation and large bending can be precisely predicted using geometry-based sensor signals obtained from the inductive springs and the inertial measurement units (IMUs) with the help of machine learning techniques. Multiple geometric signals are fused into robust pose estimations, and a data-efficient training process is achieved after applying the strategy of sim-to-real transfer. As a result, we can achieve proprioception that is robust to the variation of external loading and has an average error of 0.7% across the workspace on a pneumatic-driven soft manipulator. The realized proprioception on soft manipulator is then contributed to building a sensor-space based algorithm for closed-loop control. A gradient descent solver is developed to drive the end-effector to achieve the required poses by iteratively computing a sequence of reference sensor signals. A conventional controller is employed in the inner loop of our algorithm to update actuators (i.e., the pressures in chambers) for approaching a reference signal in the sensor-space. The systematic function of closed-loop control has been demonstrated in tasks like path following and pick-and-place under different external loads.
Support Generation for Robot-Assisted 3D Printing with Curved Layers
Feb 10, 2023



Robot-assisted 3D printing has drawn a lot of attention by its capability to fabricate curved layers that are optimized according to different objectives. However, the support generation algorithm based on a fixed printing direction for planar layers cannot be directly applied for curved layers as the orientation of material accumulation is dynamically varied. In this paper, we propose a skeleton-based support generation method for robot-assisted 3D printing with curved layers. The support is represented as an implicit solid so that the problems of numerical robustness can be effectively avoided. The effectiveness of our algorithm is verified on a dual-material printing platform that consists of a robotic arm and a newly designed dual-material extruder. Experiments have been successfully conducted on our system to fabricate a variety of freeform models.
OpenPneu: Compact platform for pneumatic actuation with multi-channels
Sep 22, 2022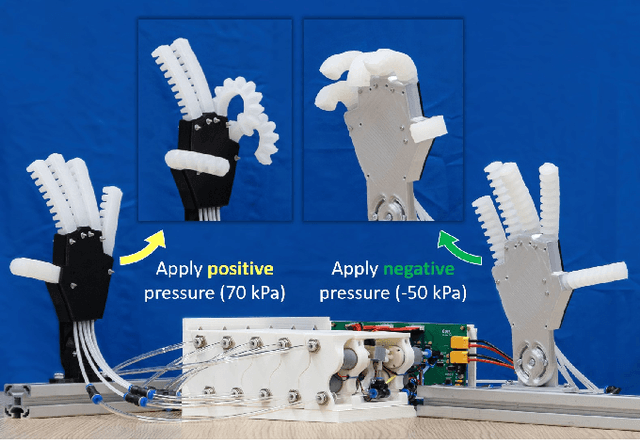

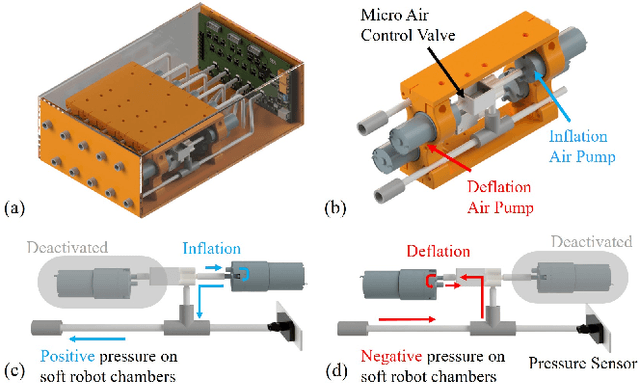
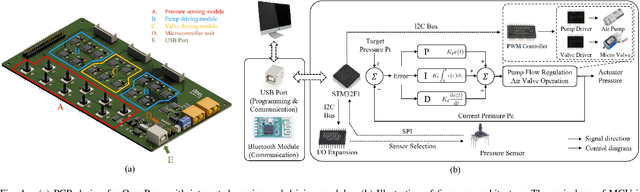
This paper presents a compact system, OpenPneu, to support the pneumatic actuation for multi-chambers on soft robots. Micro-pumps are employed in the system to generate airflow and therefore no extra input as compressed air is needed. Our system conducts modular design to provide good scalability, which has been demonstrated on a prototype with ten air channels. Each air channel of OpenPneu is equipped with both the inflation and the deflation functions to provide a full range pressure supply from positive to negative with a maximal flow rate at 1.7 L/min. High precision closed-loop control of pressures has been built into our system to achieve stable and efficient dynamic performance in actuation. An open-source control interface and API in Python are provided. We also demonstrate the functionality of OpenPneu on three soft robotic systems with up to 10 chambers.
Soft Robotic Mannequin: Design and Algorithm for Deformation Control
May 23, 2022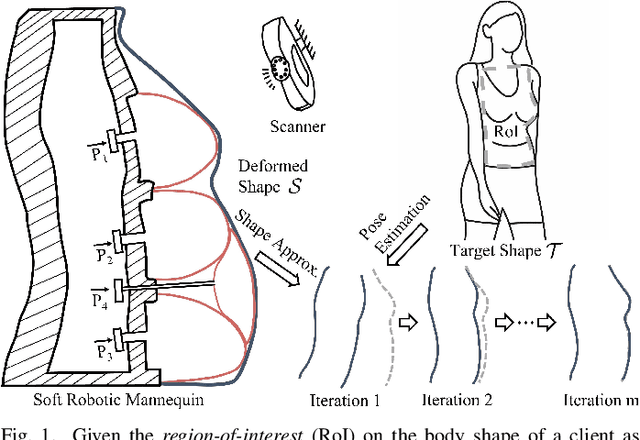
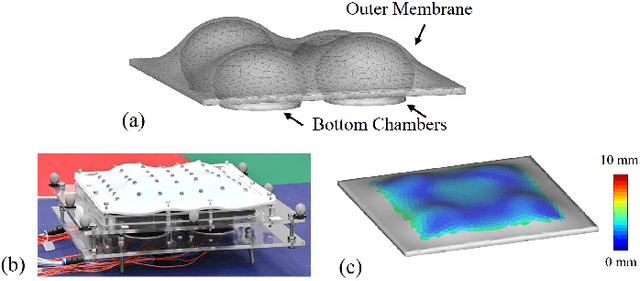
This paper presents a novel soft robotic system for a deformable mannequin that can be employed to physically realize the 3D geometry of different human bodies. The soft membrane on a mannequin is deformed by inflating several curved chambers using pneumatic actuation. Controlling the freeform surface of a soft membrane by adjusting the pneumatic actuation in different chambers is challenging as the membrane's shape is commonly determined by the interaction between all chambers. Using vision feedback provided by a structured-light based 3D scanner, we developed an efficient algorithm to compute the optimized actuation of all chambers which could drive the soft membrane to deform into the best approximation of different target shapes. Our algorithm converges quickly by including pose estimation in the loop of optimization. The time-consuming step of evaluating derivatives on the deformable membrane is avoided by using the Broyden update when possible. The effectiveness of our soft robotic mannequin with controlled deformation has been verified in experiments.
Collision-Aware Fast Simulation for Soft Robots by Optimization-Based Geometric Computing
Mar 03, 2022
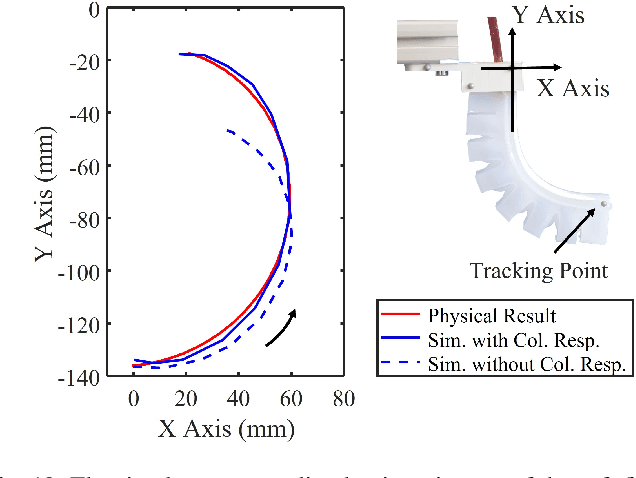

Soft robots are able to safely interact with environments because of their mechanical compliance. Self-collision is also employed in the modern design of soft robots to enhance their performance in different tasks. However, developing an efficient and reliable simulator which can handle the collision response well, is still a challenging task in the research of soft robotics. This paper presents a collision-aware simulator based on geometric optimization, in which we develop a highly efficient and realistic collision checking / response model incorporating a hyperelastic material property. Both actuated deformation and collision response for soft robots are formulated as geometry-based objectives. The collision-free body of a soft robot can be obtained by minimizing the geometry-based objective function. Different from the FEA-based physical simulation, the proposed pipeline performs a much lower computational cost. Moreover, adaptive remeshing is applied to achieve the improvement of the convergence when dealing with soft robots having large volume variations. Experimental tests are conducted on different soft robots to verify the performance of our approach.
Singularity-aware motion planning for multi-axis additive manufacturing
Feb 27, 2021

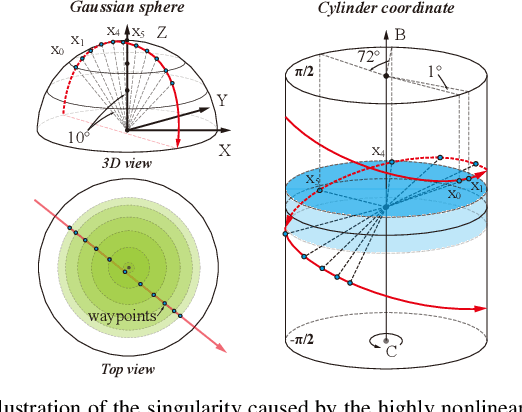
Multi-axis additive manufacturing enables high flexibility of material deposition along dynamically varied directions. The Cartesian motion platforms of these machines include three parallel axes and two rotational axes. Singularity on rotational axes is a critical issue to be tackled in motion planning for ensuring high quality of manufacturing results. The highly nonlinear mapping in the singular region can convert a smooth toolpath with uniformly sampled waypoints defined in the model coordinate system into a highly discontinuous motion in the machine coordinate system, which leads to over-extrusion / under-extrusion of materials in filament-based additive manufacturing. Moreover, collision may occur when sampling-based collision avoidance is employed. In this paper, we present a motion planning method to support the manufacturing realization of designed toolpaths for multi-axis additive manufacturing. Problems of singularity and collision are considered in an integrated manner to improve the motion therefore the quality of fabrication. Experiments are conducted to demonstrate the performance of our method.
Jacobian-based learning for inverse kinematics of soft robots
Dec 27, 2020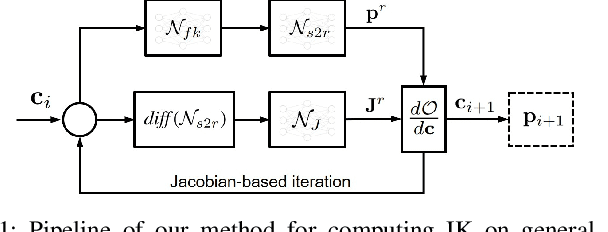
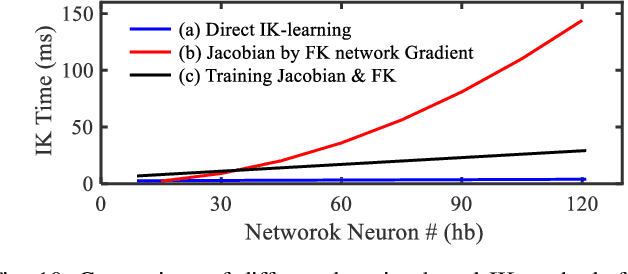
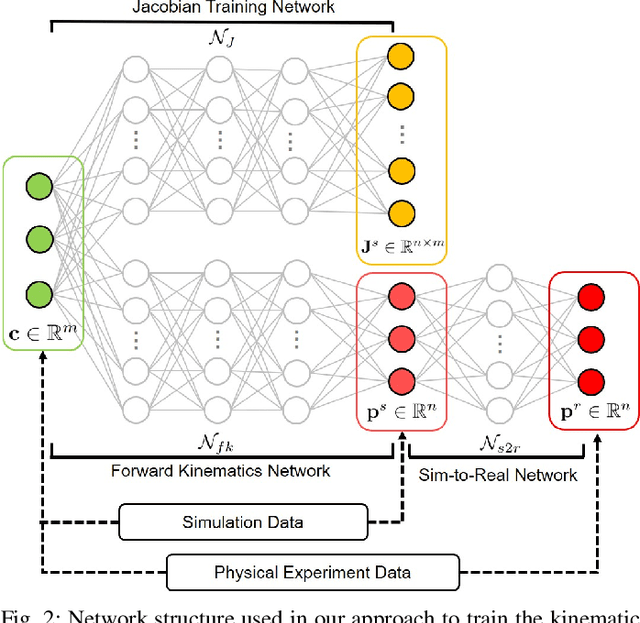
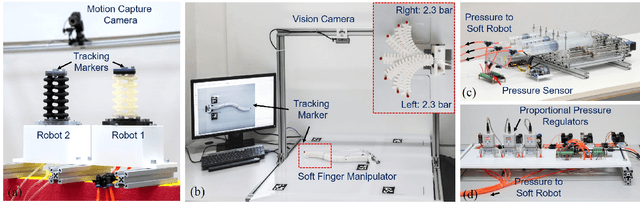
This paper presents a new method to solve the inverse kinematic (IK) problem in real-time on soft robots with highly non-linear deformation. The major challenge of efficiently computing IK for such robots is caused by the lack of analytical formulation for either forward or inverse kinematics. To tackle this challenge, we employ neural-networks to learn both the mapping function of forward kinematics and also the Jacobian of this function. As a result, Jacobian-based iteration can be applied to solve the IK problem. A sim-to-real training transfer strategy is conducted to make this approach more practical. We first generate large amount of samples in a simulation environment for learning both the kinematic and the Jacobian networks of a soft robot design. After that, a sim-to-real layer of differentiable neurons is employed to map the results of simulation to the physical hardware, where this sim-to-real layer can be learned from very limited number of training samples generated on the hardware. The effectiveness of our approach has been verified on several pneumatic-driven soft robots in the tasks of trajectory following and interactive positioning.