 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeatherEdit: Controllable Weather Editing with 4D Gaussian Field
May 26, 2025In this work, we present WeatherEdit, a novel weather editing pipeline for generating realistic weather effects with controllable types and severity in 3D scenes. Our approach is structured into two key components: weather background editing and weather particle construction. For weather background editing, we introduce an all-in-one adapter that integrates multiple weather styles into a single pretrained diffusion model, enabling the generation of diverse weather effects in 2D image backgrounds. During inference, we design a Temporal-View (TV-) attention mechanism that follows a specific order to aggregate temporal and spatial information, ensuring consistent editing across multi-frame and multi-view images. To construct the weather particles, we first reconstruct a 3D scene using the edited images and then introduce a dynamic 4D Gaussian field to generate snowflakes, raindrops and fog in the scene. The attributes and dynamics of these particles are precisely controlled through physical-based modelling and simulation, ensuring realistic weather representation and flexible severity adjustments. Finally, we integrate the 4D Gaussian field with the 3D scene to render consistent and highly realistic weather effects. Experiments on multiple driving datasets demonstrate that WeatherEdit can generate diverse weather effects with controllable condition severity, highlighting its potential for autonomous driving simulation in adverse weather. See project page: https://jumponthemoon.github.io/w-edit
WeatherGS: 3D Scene Reconstruction in Adverse Weather Conditions via Gaussian Splatting
Dec 25, 2024



3D Gaussian Splatting (3DGS) has gained significant attention for 3D scene reconstruction, but still suffers from complex outdoor environments, especially under adverse weather. This is because 3DGS treats the artifacts caused by adverse weather as part of the scene and will directly reconstruct them, largely reducing the clarity of the reconstructed scene. To address this challenge, we propose WeatherGS, a 3DGS-based framework for reconstructing clear scenes from multi-view images under different weather conditions. Specifically, we explicitly categorize the multi-weather artifacts into the dense particles and lens occlusions that have very different characters, in which the former are caused by snowflakes and raindrops in the air, and the latter are raised by the precipitation on the camera lens. In light of this, we propose a dense-to-sparse preprocess strategy, which sequentially removes the dense particles by an Atmospheric Effect Filter (AEF) and then extracts the relatively sparse occlusion masks with a Lens Effect Detector (LED). Finally, we train a set of 3D Gaussians by the processed images and generated masks for excluding occluded areas, and accurately recover the underlying clear scene by Gaussian splatting. We conduct a diverse and challenging benchmark to facilitate the evaluation of 3D reconstruction under complex weather scenarios. Extensive experiments on this benchmark demonstrate that our WeatherGS consistently produces high-quality, clean scenes across various weather scenarios, outperforming existing state-of-the-art methods. See project page:https://jumponthemoon.github.io/weather-gs.
WeatherDG: LLM-assisted Procedural Weather Generation for Domain-Generalized Semantic Segmentation
Oct 15, 2024In this work, we propose a novel approach, namely WeatherDG, that can generate realistic, weather-diverse, and driving-screen images based on the cooperation of two foundation models, i.e, Stable Diffusion (SD) and Large Language Model (LLM). Specifically, we first fine-tune the SD with source data, aligning the content and layout of generated samples with real-world driving scenarios. Then, we propose a procedural prompt generation method based on LLM, which can enrich scenario descriptions and help SD automatically generate more diverse, detailed images. In addition, we introduce a balanced generation strategy, which encourages the SD to generate high-quality objects of tailed classes under various weather conditions, such as riders and motorcycles. This segmentation-model-agnostic method can improve the generalization ability of existing models by additionally adapting them with the generated synthetic data. Experiments on three challenging datasets show that our method can significantly improve the segmentation performance of different state-of-the-art models on target domains. Notably, in the setting of ''Cityscapes to ACDC'', our method improves the baseline HRDA by 13.9% in mIoU.
Learning Based Toolpath Planner on Diverse Graphs for 3D Printing
Aug 17, 2024



This paper presents a learning based planner for computing optimized 3D printing toolpaths on prescribed graphs, the challenges of which include the varying graph structures on different models and the large scale of nodes & edges on a graph. We adopt an on-the-fly strategy to tackle these challenges, formulating the planner as a Deep Q-Network (DQN) based optimizer to decide the next `best' node to visit. We construct the state spaces by the Local Search Graph (LSG) centered at different nodes on a graph, which is encoded by a carefully designed algorithm so that LSGs in similar configurations can be identified to re-use the earlier learned DQN priors for accelerating the computation of toolpath planning. Our method can cover different 3D printing applications by defining their corresponding reward functions. Toolpath planning problems in wire-frame printing, continuous fiber printing, and metallic printing are selected to demonstrate its generality. The performance of our planner has been verified by testing the resultant toolpaths in physical experiments. By using our planner, wire-frame models with up to 4.2k struts can be successfully printed, up to 93.3% of sharp turns on continuous fiber toolpaths can be avoided, and the thermal distortion in metallic printing can be reduced by 24.9%.
Spring-IMU Fusion Based Proprioception for Feedback Control of Soft Manipulators
Sep 25, 2023This paper presents a novel framework to realize proprioception and closed-loop control for soft manipulators. Deformations with large elongation and large bending can be precisely predicted using geometry-based sensor signals obtained from the inductive springs and the inertial measurement units (IMUs) with the help of machine learning techniques. Multiple geometric signals are fused into robust pose estimations, and a data-efficient training process is achieved after applying the strategy of sim-to-real transfer. As a result, we can achieve proprioception that is robust to the variation of external loading and has an average error of 0.7% across the workspace on a pneumatic-driven soft manipulator. The realized proprioception on soft manipulator is then contributed to building a sensor-space based algorithm for closed-loop control. A gradient descent solver is developed to drive the end-effector to achieve the required poses by iteratively computing a sequence of reference sensor signals. A conventional controller is employed in the inner loop of our algorithm to update actuators (i.e., the pressures in chambers) for approaching a reference signal in the sensor-space. The systematic function of closed-loop control has been demonstrated in tasks like path following and pick-and-place under different external loads.
Asynchronous "Events" are Better For Motion Estimation
Apr 24, 2019

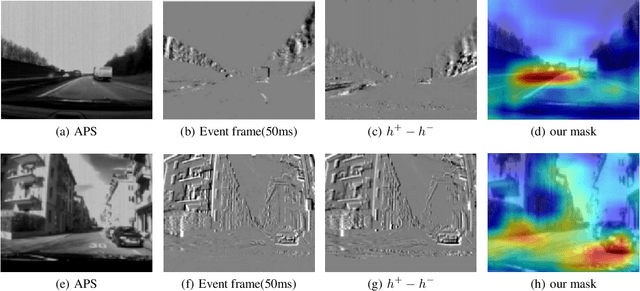
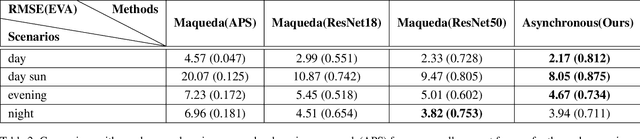
Event-based camera is a bio-inspired vision sensor that records intensity changes (called event) asynchronously in each pixel. As an instance of event-based camera, Dynamic and Active-pixel Vision Sensor (DAVIS) combines a standard camera and an event-based camera. However, traditional models could not deal with the event stream asynchronously. To analyze the event stream asynchronously, most existing approaches accumulate events within a certain time interval and treat the accumulated events as a synchronous frame, which wastes the intensity change information and weakens the advantages of DAVIS. Therefore, in this paper, we present the first neural asynchronous approach to process event stream for event-based camera. Our method asynchronously extracts dynamic information from events by leveraging previous motion and critical features of gray-scale frames. To our best knowledge, this is the first neural asynchronous method to analyze event stream through a novel deep neural network. Extensive experiments demonstrate that our proposed model achieves remarkable improvements against the state-of-the-art baselines.