 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Co-Optimization of Structural Topology, Manufacturable Layers, and Path Orientations for Fiber-Reinforced Composites
Apr 30, 2025We propose a neural network-based computational framework for the simultaneous optimization of structural topology, curved layers, and path orientations to achieve strong anisotropic strength in fiber-reinforced thermoplastic composites while ensuring manufacturability. Our framework employs three implicit neural fields to represent geometric shape, layer sequence, and fiber orientation. This enables the direct formulation of both design and manufacturability objectives - such as anisotropic strength, structural volume, machine motion control, layer curvature, and layer thickness - into an integrated and differentiable optimization process. By incorporating these objectives as loss functions, the framework ensures that the resultant composites exhibit optimized mechanical strength while remaining its manufacturability for filament-based multi-axis 3D printing across diverse hardware platforms. Physical experiments demonstrate that the composites generated by our co-optimization method can achieve an improvement of up to 33.1% in failure loads compared to composites with sequentially optimized structures and manufacturing sequences.
Learning Based Toolpath Planner on Diverse Graphs for 3D Printing
Aug 17, 2024



This paper presents a learning based planner for computing optimized 3D printing toolpaths on prescribed graphs, the challenges of which include the varying graph structures on different models and the large scale of nodes & edges on a graph. We adopt an on-the-fly strategy to tackle these challenges, formulating the planner as a Deep Q-Network (DQN) based optimizer to decide the next `best' node to visit. We construct the state spaces by the Local Search Graph (LSG) centered at different nodes on a graph, which is encoded by a carefully designed algorithm so that LSGs in similar configurations can be identified to re-use the earlier learned DQN priors for accelerating the computation of toolpath planning. Our method can cover different 3D printing applications by defining their corresponding reward functions. Toolpath planning problems in wire-frame printing, continuous fiber printing, and metallic printing are selected to demonstrate its generality. The performance of our planner has been verified by testing the resultant toolpaths in physical experiments. By using our planner, wire-frame models with up to 4.2k struts can be successfully printed, up to 93.3% of sharp turns on continuous fiber toolpaths can be avoided, and the thermal distortion in metallic printing can be reduced by 24.9%.
Function based sim-to-real learning for shape control of deformable free-form surfaces
May 14, 2024



For the shape control of deformable free-form surfaces, simulation plays a crucial role in establishing the mapping between the actuation parameters and the deformed shapes. The differentiation of this forward kinematic mapping is usually employed to solve the inverse kinematic problem for determining the actuation parameters that can realize a target shape. However, the free-form surfaces obtained from simulators are always different from the physically deformed shapes due to the errors introduced by hardware and the simplification adopted in physical simulation. To fill the gap, we propose a novel deformation function based sim-to-real learning method that can map the geometric shape of a simulated model into its corresponding shape of the physical model. Unlike the existing sim-to-real learning methods that rely on completely acquired dense markers, our method accommodates sparsely distributed markers and can resiliently use all captured frames -- even for those in the presence of missing markers. To demonstrate its effectiveness, our sim-to-real method has been integrated into a neural network-based computational pipeline designed to tackle the inverse kinematic problem on a pneumatically actuated deformable mannequin.
Physics-Aware Iterative Learning and Prediction of Saliency Map for Bimanual Grasp Planning
Apr 13, 2024



Learning the skill of human bimanual grasping can extend the capabilities of robotic systems when grasping large or heavy objects. However, it requires a much larger search space for grasp points than single-hand grasping and numerous bimanual grasping annotations for network learning, making both data-driven or analytical grasping methods inefficient and insufficient. We propose a framework for bimanual grasp saliency learning that aims to predict the contact points for bimanual grasping based on existing human single-handed grasping data. We learn saliency corresponding vectors through minimal bimanual contact annotations that establishes correspondences between grasp positions of both hands, capable of eliminating the need for training a large-scale bimanual grasp dataset. The existing single-handed grasp saliency value serves as the initial value for bimanual grasp saliency, and we learn a saliency adjusted score that adds the initial value to obtain the final bimanual grasp saliency value, capable of predicting preferred bimanual grasp positions from single-handed grasp saliency. We also introduce a physics-balance loss function and a physics-aware refinement module that enables physical grasp balance, capable of enhancing the generalization of unknown objects. Comprehensive experiments in simulation and comparisons on dexterous grippers have demonstrated that our method can achieve balanced bimanual grasping effectively.
Computer-Controlled 3D Freeform Surface Weaving
Mar 01, 2024



In this paper, we present a new computer-controlled weaving technology that enables the fabrication of woven structures in the shape of given 3D surfaces by using threads in non-traditional materials with high bending-stiffness, allowing for multiple applications with the resultant woven fabrics. A new weaving machine and a new manufacturing process are developed to realize the function of 3D surface weaving by the principle of short-row shaping. A computational solution is investigated to convert input 3D freeform surfaces into the corresponding weaving operations (indicated as W-code) to guide the operation of this system. A variety of examples using cotton threads, conductive threads and optical fibres are fabricated by our prototype system to demonstrate its functionality.
Spring-IMU Fusion Based Proprioception for Feedback Control of Soft Manipulators
Sep 25, 2023This paper presents a novel framework to realize proprioception and closed-loop control for soft manipulators. Deformations with large elongation and large bending can be precisely predicted using geometry-based sensor signals obtained from the inductive springs and the inertial measurement units (IMUs) with the help of machine learning techniques. Multiple geometric signals are fused into robust pose estimations, and a data-efficient training process is achieved after applying the strategy of sim-to-real transfer. As a result, we can achieve proprioception that is robust to the variation of external loading and has an average error of 0.7% across the workspace on a pneumatic-driven soft manipulator. The realized proprioception on soft manipulator is then contributed to building a sensor-space based algorithm for closed-loop control. A gradient descent solver is developed to drive the end-effector to achieve the required poses by iteratively computing a sequence of reference sensor signals. A conventional controller is employed in the inner loop of our algorithm to update actuators (i.e., the pressures in chambers) for approaching a reference signal in the sensor-space. The systematic function of closed-loop control has been demonstrated in tasks like path following and pick-and-place under different external loads.
Support Generation for Robot-Assisted 3D Printing with Curved Layers
Feb 10, 2023



Robot-assisted 3D printing has drawn a lot of attention by its capability to fabricate curved layers that are optimized according to different objectives. However, the support generation algorithm based on a fixed printing direction for planar layers cannot be directly applied for curved layers as the orientation of material accumulation is dynamically varied. In this paper, we propose a skeleton-based support generation method for robot-assisted 3D printing with curved layers. The support is represented as an implicit solid so that the problems of numerical robustness can be effectively avoided. The effectiveness of our algorithm is verified on a dual-material printing platform that consists of a robotic arm and a newly designed dual-material extruder. Experiments have been successfully conducted on our system to fabricate a variety of freeform models.
OpenPneu: Compact platform for pneumatic actuation with multi-channels
Sep 22, 2022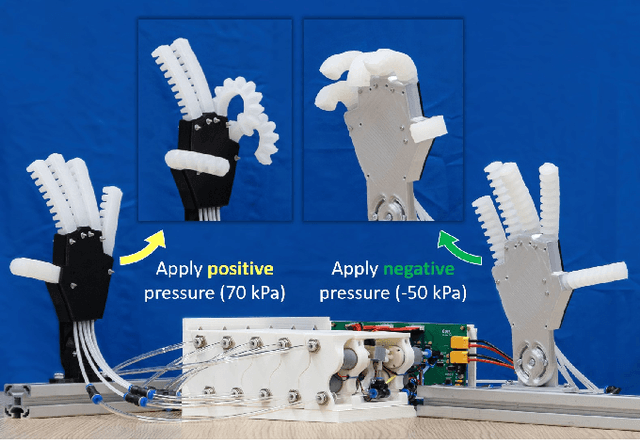

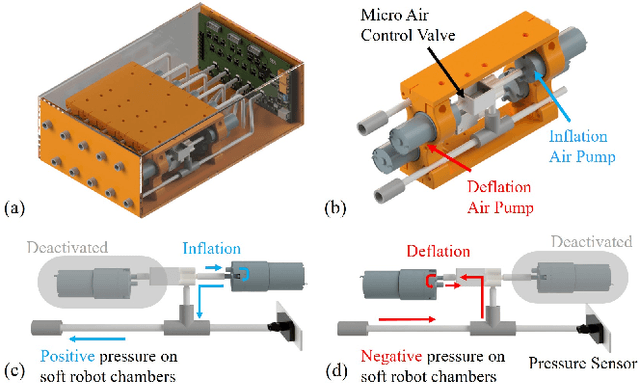
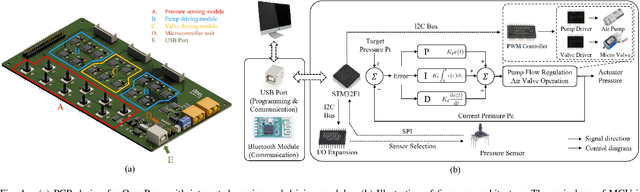
This paper presents a compact system, OpenPneu, to support the pneumatic actuation for multi-chambers on soft robots. Micro-pumps are employed in the system to generate airflow and therefore no extra input as compressed air is needed. Our system conducts modular design to provide good scalability, which has been demonstrated on a prototype with ten air channels. Each air channel of OpenPneu is equipped with both the inflation and the deflation functions to provide a full range pressure supply from positive to negative with a maximal flow rate at 1.7 L/min. High precision closed-loop control of pressures has been built into our system to achieve stable and efficient dynamic performance in actuation. An open-source control interface and API in Python are provided. We also demonstrate the functionality of OpenPneu on three soft robotic systems with up to 10 chambers.
Optimizing out-of-plane stiffness for soft grippers
Jul 19, 2022
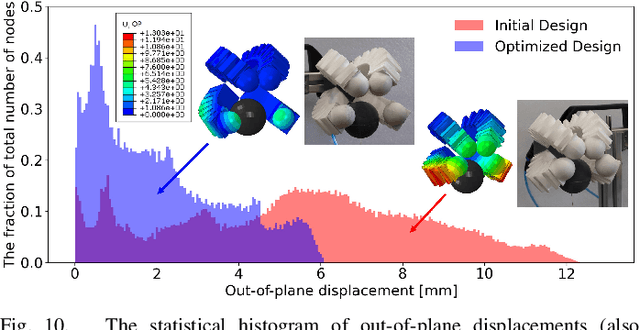
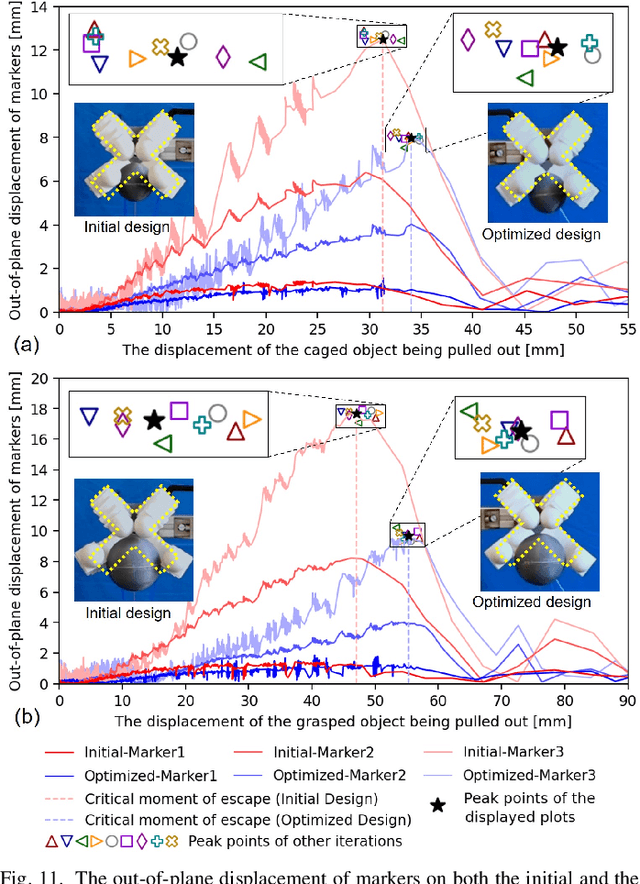
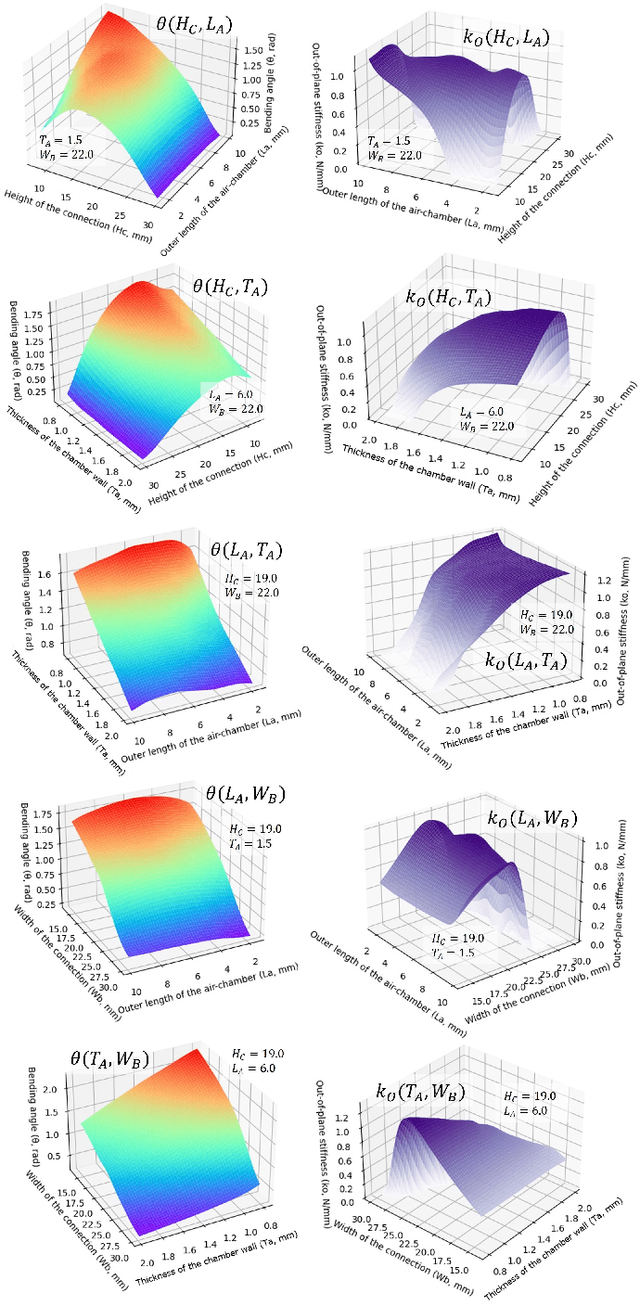
In this paper, we presented a data-driven framework to optimize the out-of-plane stiffness for soft grippers to achieve mechanical properties as hard-to-twist and easy-to-bend. The effectiveness of this method is demonstrated in the design of a soft pneumatic bending actuator (SPBA). First, a new objective function is defined to quantitatively evaluate the out-of-plane stiffness as well as the bending performance. Then, sensitivity analysis is conducted on the parametric model of an SPBA design to determine the optimized design parameters with the help of Finite Element Analysis (FEA). To enable the computation of numerical optimization, a data-driven approach is employed to learn a cost function that directly represents the out-of-plane stiffness as a differentiable function of the design variables. A gradient-based method is used to maximize the out-of-plane stiffness of the SPBA while ensuring specific bending performance. The effectiveness of our method has been demonstrated in physical experiments taken on 3D-printed grippers.
Soft Robotic Mannequin: Design and Algorithm for Deformation Control
May 23, 2022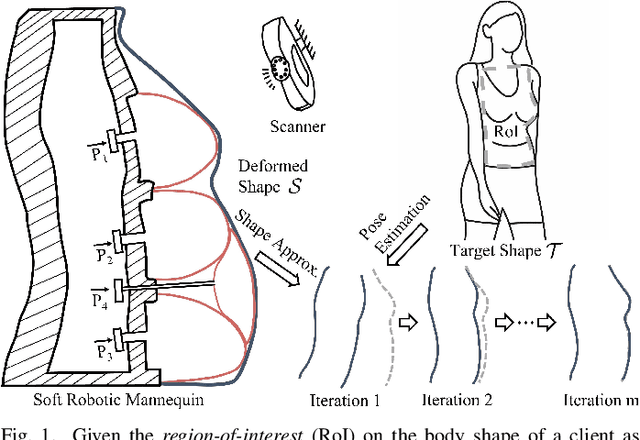
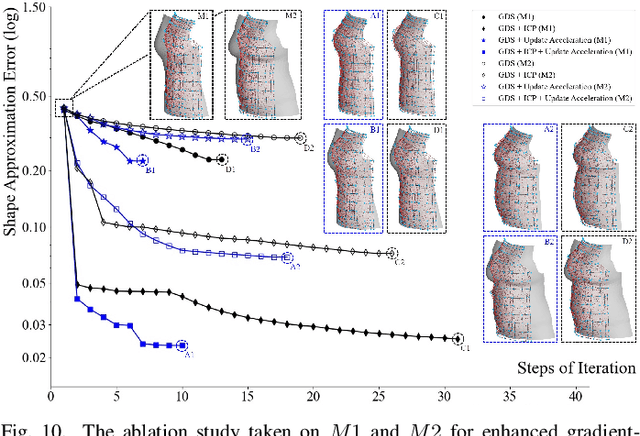
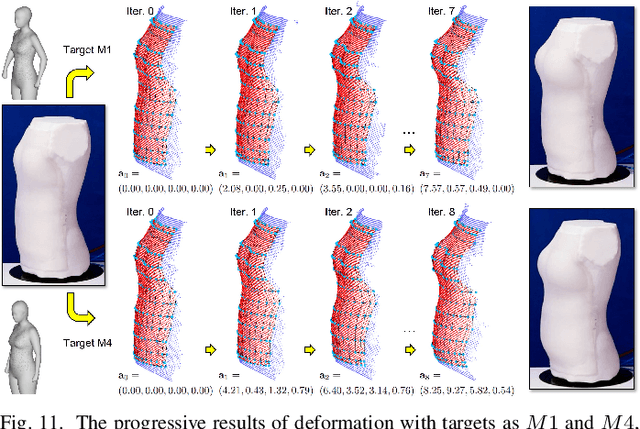
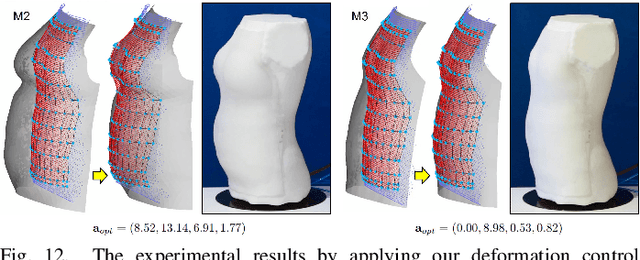
This paper presents a novel soft robotic system for a deformable mannequin that can be employed to physically realize the 3D geometry of different human bodies. The soft membrane on a mannequin is deformed by inflating several curved chambers using pneumatic actuation. Controlling the freeform surface of a soft membrane by adjusting the pneumatic actuation in different chambers is challenging as the membrane's shape is commonly determined by the interaction between all chambers. Using vision feedback provided by a structured-light based 3D scanner, we developed an efficient algorithm to compute the optimized actuation of all chambers which could drive the soft membrane to deform into the best approximation of different target shapes. Our algorithm converges quickly by including pose estimation in the loop of optimization. The time-consuming step of evaluating derivatives on the deformable membrane is avoided by using the Broyden update when possible. The effectiveness of our soft robotic mannequin with controlled deformation has been verified in experiments.