 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputer-Controlled 3D Freeform Surface Weaving
Mar 01, 2024



In this paper, we present a new computer-controlled weaving technology that enables the fabrication of woven structures in the shape of given 3D surfaces by using threads in non-traditional materials with high bending-stiffness, allowing for multiple applications with the resultant woven fabrics. A new weaving machine and a new manufacturing process are developed to realize the function of 3D surface weaving by the principle of short-row shaping. A computational solution is investigated to convert input 3D freeform surfaces into the corresponding weaving operations (indicated as W-code) to guide the operation of this system. A variety of examples using cotton threads, conductive threads and optical fibres are fabricated by our prototype system to demonstrate its functionality.
Singularity-aware motion planning for multi-axis additive manufacturing
Feb 27, 2021
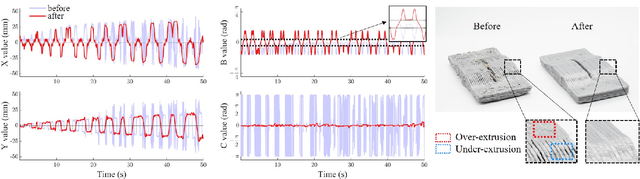

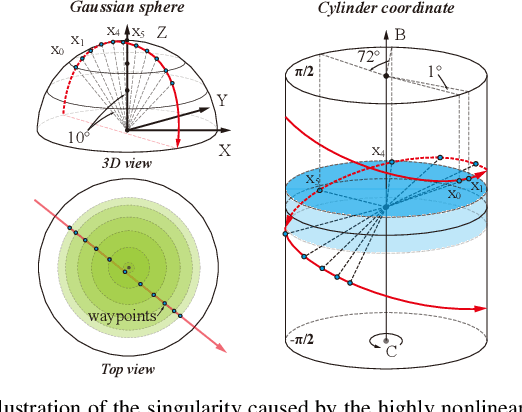
Multi-axis additive manufacturing enables high flexibility of material deposition along dynamically varied directions. The Cartesian motion platforms of these machines include three parallel axes and two rotational axes. Singularity on rotational axes is a critical issue to be tackled in motion planning for ensuring high quality of manufacturing results. The highly nonlinear mapping in the singular region can convert a smooth toolpath with uniformly sampled waypoints defined in the model coordinate system into a highly discontinuous motion in the machine coordinate system, which leads to over-extrusion / under-extrusion of materials in filament-based additive manufacturing. Moreover, collision may occur when sampling-based collision avoidance is employed. In this paper, we present a motion planning method to support the manufacturing realization of designed toolpaths for multi-axis additive manufacturing. Problems of singularity and collision are considered in an integrated manner to improve the motion therefore the quality of fabrication. Experiments are conducted to demonstrate the performance of our method.