 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFin ray-inspired, Origami, Small Scale Actuator for Fin Manipulation in Aquatic Bioinspired Robots
Jul 23, 2024Fish locomotion is enabled by fin rays-actively deformable boney rods, which manipulate the fin to facilitate complex interaction with surrounding water and enable propulsion. Replicating the performance and kinematics of the biological fin ray from an engineering perspective is a challenging task and has not been realised thus far. This work introduces a prototype of a fin ray-inspired origami electromagnetic tendon-driven (FOLD) actuator, designed to emulate the functional dynamics of fish fin rays. Constructed in minutes using origami/kirigami and paper joinery techniques from flat laser-cut polypropylene film, this actuator is low-cost at {\pounds}0.80 (\$1), simple to assemble, and durable for over one million cycles. We leverage its small size to embed eight into two fin membranes of a 135 mm long cuttlefish robot capable of four degrees of freedom swimming. We present an extensive kinematic and swimming parametric study with 1015 data points from 7.6 hours of video, which has been used to determine optimal kinematic parameters and validate theoretical constants observed in aquatic animals. Notably, the study explores the nuanced interplay between undulation patterns, power distribution, and locomotion efficiency, underscoring the potential of the actuator as a model system for the investigation of energy-efficient propulsion and control of bioinspired systems. The versatility of the actuator is further demonstrated by its integration into a fish and a jellyfish.
Function based sim-to-real learning for shape control of deformable free-form surfaces
May 14, 2024



For the shape control of deformable free-form surfaces, simulation plays a crucial role in establishing the mapping between the actuation parameters and the deformed shapes. The differentiation of this forward kinematic mapping is usually employed to solve the inverse kinematic problem for determining the actuation parameters that can realize a target shape. However, the free-form surfaces obtained from simulators are always different from the physically deformed shapes due to the errors introduced by hardware and the simplification adopted in physical simulation. To fill the gap, we propose a novel deformation function based sim-to-real learning method that can map the geometric shape of a simulated model into its corresponding shape of the physical model. Unlike the existing sim-to-real learning methods that rely on completely acquired dense markers, our method accommodates sparsely distributed markers and can resiliently use all captured frames -- even for those in the presence of missing markers. To demonstrate its effectiveness, our sim-to-real method has been integrated into a neural network-based computational pipeline designed to tackle the inverse kinematic problem on a pneumatically actuated deformable mannequin.
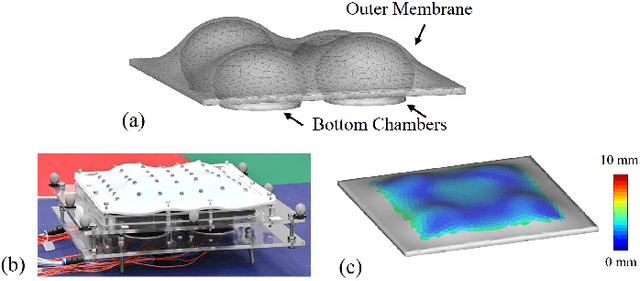
Soft Robotic Mannequin: Design and Algorithm for Deformation Control
May 23, 2022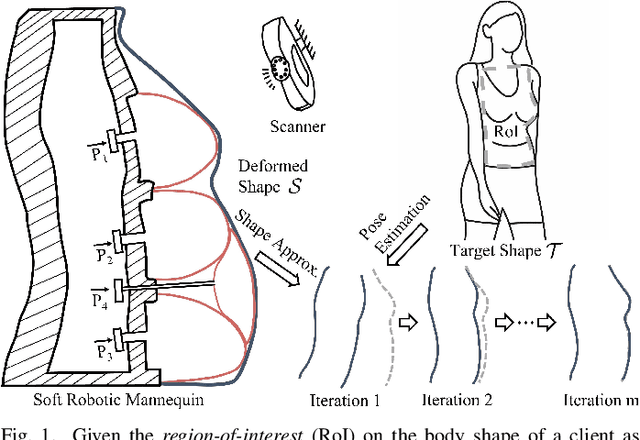
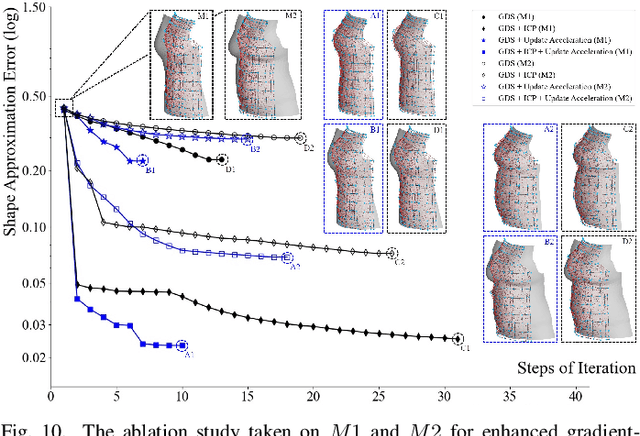
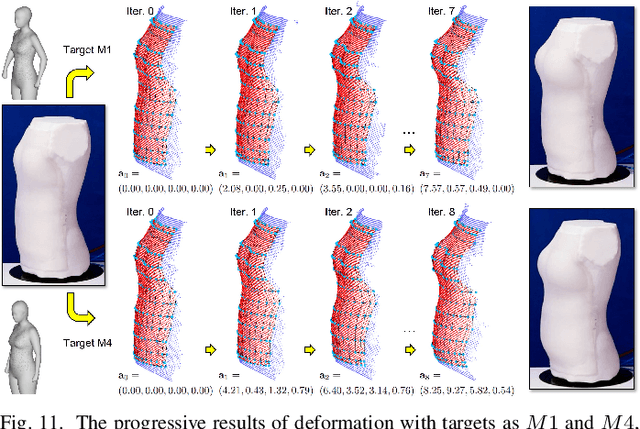
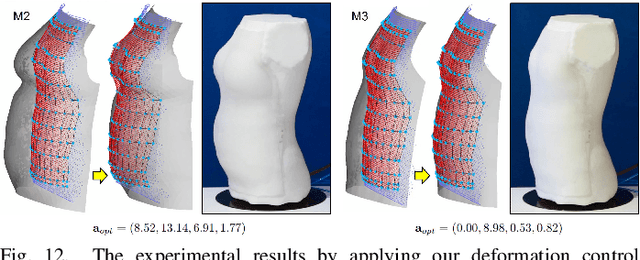
This paper presents a novel soft robotic system for a deformable mannequin that can be employed to physically realize the 3D geometry of different human bodies. The soft membrane on a mannequin is deformed by inflating several curved chambers using pneumatic actuation. Controlling the freeform surface of a soft membrane by adjusting the pneumatic actuation in different chambers is challenging as the membrane's shape is commonly determined by the interaction between all chambers. Using vision feedback provided by a structured-light based 3D scanner, we developed an efficient algorithm to compute the optimized actuation of all chambers which could drive the soft membrane to deform into the best approximation of different target shapes. Our algorithm converges quickly by including pose estimation in the loop of optimization. The time-consuming step of evaluating derivatives on the deformable membrane is avoided by using the Broyden update when possible. The effectiveness of our soft robotic mannequin with controlled deformation has been verified in experiments.
Collision-Aware Fast Simulation for Soft Robots by Optimization-Based Geometric Computing
Mar 03, 2022
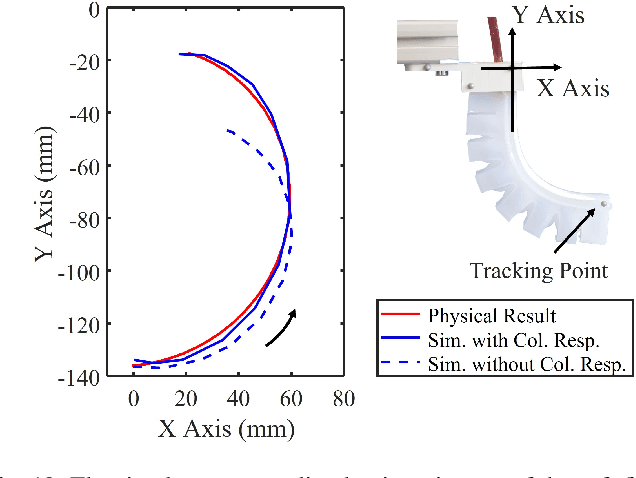

Soft robots are able to safely interact with environments because of their mechanical compliance. Self-collision is also employed in the modern design of soft robots to enhance their performance in different tasks. However, developing an efficient and reliable simulator which can handle the collision response well, is still a challenging task in the research of soft robotics. This paper presents a collision-aware simulator based on geometric optimization, in which we develop a highly efficient and realistic collision checking / response model incorporating a hyperelastic material property. Both actuated deformation and collision response for soft robots are formulated as geometry-based objectives. The collision-free body of a soft robot can be obtained by minimizing the geometry-based objective function. Different from the FEA-based physical simulation, the proposed pipeline performs a much lower computational cost. Moreover, adaptive remeshing is applied to achieve the improvement of the convergence when dealing with soft robots having large volume variations. Experimental tests are conducted on different soft robots to verify the performance of our approach.
CLOVER Robot: A Minimally Actuated Jumping Robotic Platform for Space Exploration
Jan 11, 2022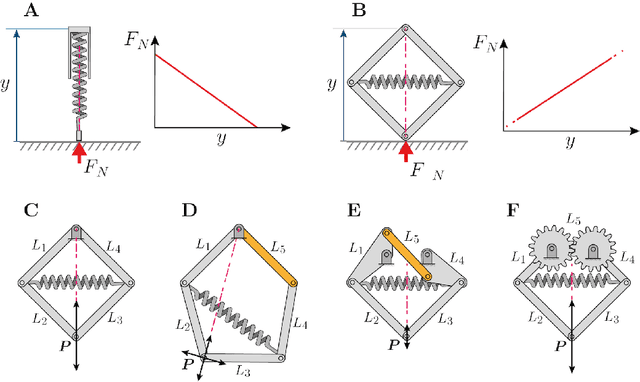
Robots have been critical instruments to space exploration by providing access to environments beyond human limitations. Jumping robot concepts are attractive solutions to negotiate complex terrain. However, among the engineering challenges to overcome to enable jumping robot concepts for sustained operation, reduction of mechanical failure modes is one of the most fundamental. This study set out to develop a jumping robot with focus on minimal actuation for reduced mechanism maintenance. We present the synthesis of a Sarrus-style linkage to constraint the system to a single translational degree of freedom without the use of typical synchronising gears. We delimit the present research to vertical solid jumps to assess the performance of the fundamental main-drive linkage. A laboratory demonstrator assists the transfer of theoretical concepts and approaches. The laboratory demonstrator performs jumps with 63% potential-to-kinetic energy conversion efficiency, with a theoretical maximum of 73%. Satisfactory operation opens up design optimisation and directional jump capability towards the development of a jumping robotic platform for space exploration.