 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCharacterising the take-off dynamics and energy efficiency in spring-driven jumping robots
Jan 10, 2024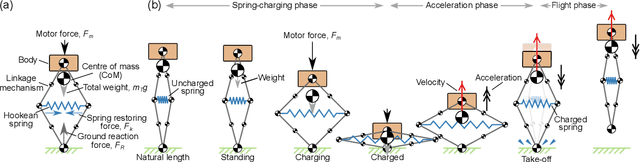
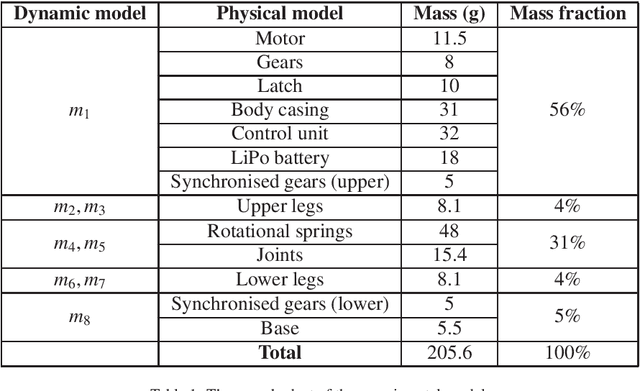
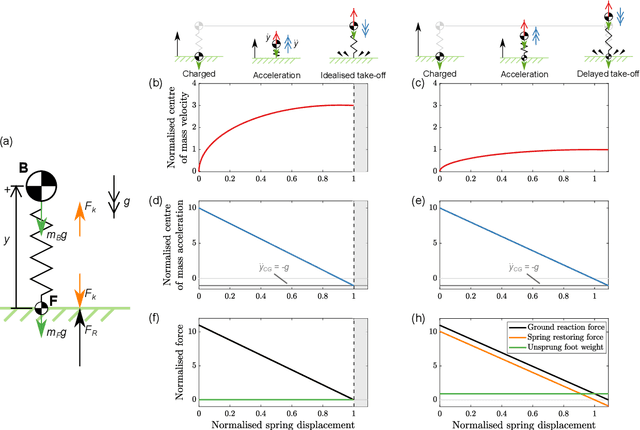
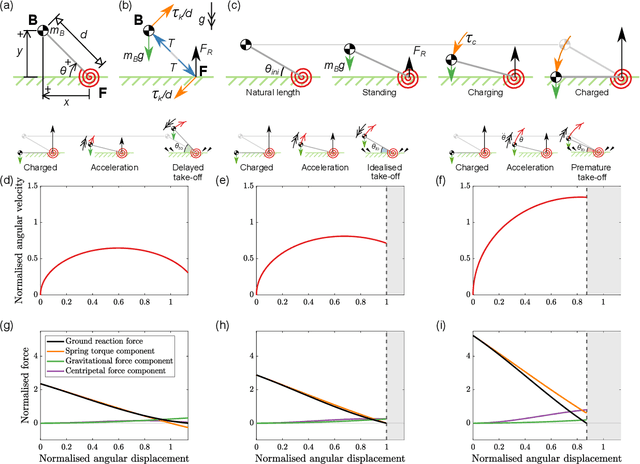
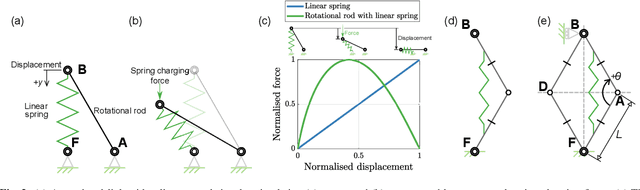
Previous design methodologies for spring-driven jumping robots focused on jump height optimization for specific tasks. In doing so, numerous designs have been proposed including using nonlinear spring-linkages to increase the elastic energy storage and jump height. However, these systems can never achieve their theoretical maximum jump height due to taking off before the spring energy is fully released, resulting in an incomplete transfer of stored elastic energy to gravitational potential energy. This paper presents low-order models aimed at characterising the energy conversion during the acceleration phase of jumping. It also proposes practical solutions for increasing the energy efficiency of jumping robots. A dynamic analysis is conducted on a multibody system comprised of rotational links, which is experimentally validated using a physical demonstrator. The analysis reveals that inefficient energy conversion is attributed to inertial effects caused by rotational and unsprung masses. Since these masses cannot be entirely eliminated from a physical linkage, a practical approach to improving energy efficiency involves structural redesign to reduce structural mass and moments of inertia while maintaining compliance with structural strength and stiffness requirements.
Elastic energy storage of spring-driven jumping robots
Nov 03, 2023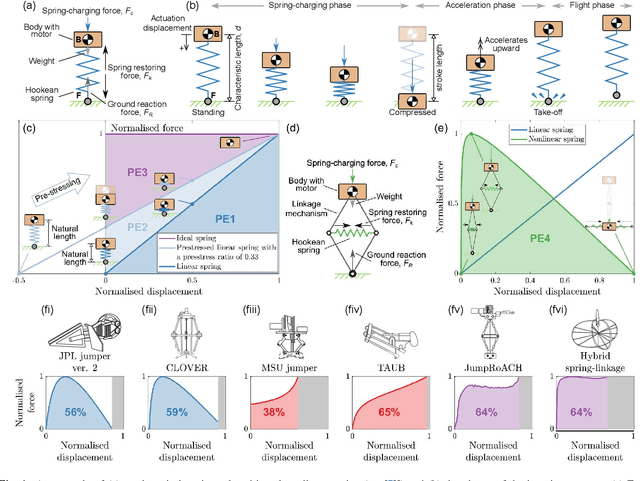


Spring-driven jumping robots use an energised spring for propulsion, while the onboard motor only serves as a spring-charging source. A common mechanism in designing these robots is the rhomboidal linkage, which has been combined with linear springs (spring-linkage) to create a nonlinear spring, thereby increasing elastic energy storage and jump height for a given motor force. The effectiveness of this spring-linkage has been examined for individual designs, but a generalised design theory of this class of system remains absent. This paper presents an energetics analysis of the spring-linkage and provides insight into designing an ideal constant force spring, which stores the maximum energy for a given motor force. A quasi-static analysis shows that the force-displacement relationship of the spring-linkage changes with the orientation and type of the spring, but is independent of the linkage scale. Combining different types and orientations of springs within the linkage enables higher elastic energy storage than using single springs. Placing two translational springs at the diagonals of the rhomboidal linkage creates an ideal spring that could increase the jump height of prior robots by 50-160%.
CLOVER Robot: A Minimally Actuated Jumping Robotic Platform for Space Exploration
Jan 11, 2022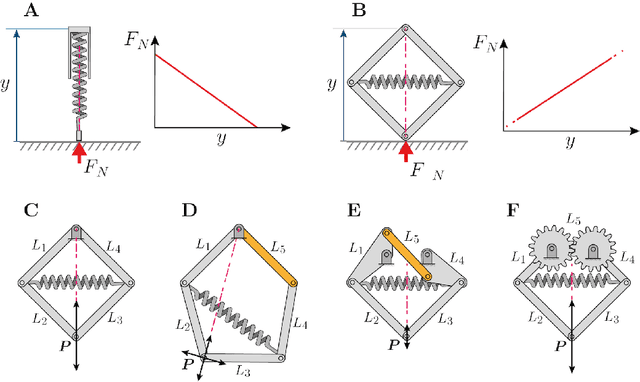
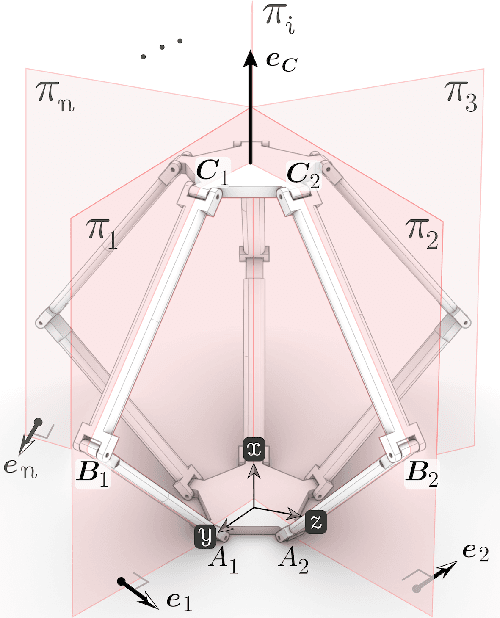
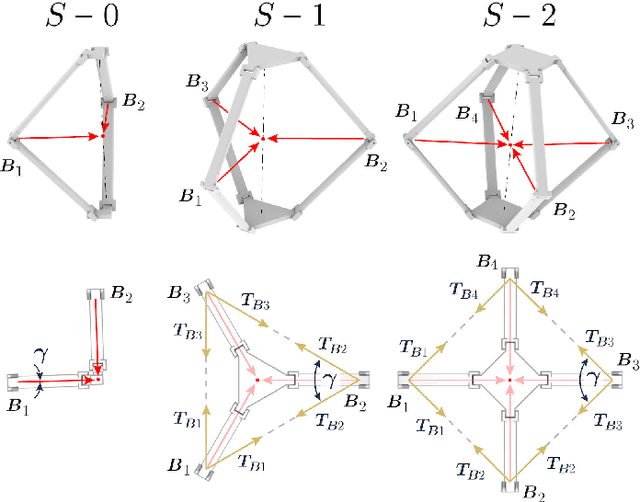
Robots have been critical instruments to space exploration by providing access to environments beyond human limitations. Jumping robot concepts are attractive solutions to negotiate complex terrain. However, among the engineering challenges to overcome to enable jumping robot concepts for sustained operation, reduction of mechanical failure modes is one of the most fundamental. This study set out to develop a jumping robot with focus on minimal actuation for reduced mechanism maintenance. We present the synthesis of a Sarrus-style linkage to constraint the system to a single translational degree of freedom without the use of typical synchronising gears. We delimit the present research to vertical solid jumps to assess the performance of the fundamental main-drive linkage. A laboratory demonstrator assists the transfer of theoretical concepts and approaches. The laboratory demonstrator performs jumps with 63% potential-to-kinetic energy conversion efficiency, with a theoretical maximum of 73%. Satisfactory operation opens up design optimisation and directional jump capability towards the development of a jumping robotic platform for space exploration.