 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Untethered Bioinspired Robotic Tensegrity Dolphin with Multi-Flexibility Design for Aquatic Locomotion
Nov 01, 2024



This paper presents the first steps toward a soft dolphin robot using a bio-inspired approach to mimic dolphin flexibility. The current dolphin robot uses a minimalist approach, with only two actuated cable-driven degrees of freedom actuated by a pair of motors. The actuated tail moves up and down in a swimming motion, but this first proof of concept does not permit controlled turns of the robot. While existing robotic dolphins typically use revolute joints to articulate rigid bodies, our design -- which will be made opensource -- incorporates a flexible tail with tunable silicone skin and actuation flexibility via a cable-driven system, which mimics muscle dynamics and design flexibility with a tunable skeleton structure. The design is also tunable since the backbone can be easily printed in various geometries. The paper provides insights into how a few such variations affect robot motion and efficiency, measured by speed and cost of transport (COT). This approach demonstrates the potential of achieving dolphin-like motion through enhanced flexibility in bio-inspired robotics.
On the Exploration of LM-Based Soft Modular Robot Design
Nov 01, 2024



Recent large language models (LLMs) have demonstrated promising capabilities in modeling real-world knowledge and enhancing knowledge-based generation tasks. In this paper, we further explore the potential of using LLMs to aid in the design of soft modular robots, taking into account both user instructions and physical laws, to reduce the reliance on extensive trial-and-error experiments typically needed to achieve robot designs that meet specific structural or task requirements. Specifically, we formulate the robot design process as a sequence generation task and find that LLMs are able to capture key requirements expressed in natural language and reflect them in the construction sequences of robots. To simplify, rather than conducting real-world experiments to assess design quality, we utilize a simulation tool to provide feedback to the generative model, allowing for iterative improvements without requiring extensive human annotations. Furthermore, we introduce five evaluation metrics to assess the quality of robot designs from multiple angles including task completion and adherence to instructions, supporting an automatic evaluation process. Our model performs well in evaluations for designing soft modular robots with uni- and bi-directional locomotion and stair-descending capabilities, highlighting the potential of using natural language and LLMs for robot design. However, we also observe certain limitations that suggest areas for further improvement.
SoftSnap: Rapid Prototyping of Untethered Soft Robots Using Snap-Together Modules
Oct 24, 2024



Soft robots offer adaptability and safe interaction with complex environments. Rapid prototyping kits that allow soft robots to be assembled easily will allow different geometries to be explored quickly to suit different environments or to mimic the motion of biological organisms. We introduce SoftSnap modules: snap-together components that enable the rapid assembly of a class of untethered soft robots. Each SoftSnap module includes embedded computation, motor-driven string actuation, and a flexible thermoplastic polyurethane (TPU) printed structure capable of deforming into various shapes based on the string configuration. These modules can be easily connected with other SoftSnap modules or customizable connectors. We demonstrate the versatility of the SoftSnap system through four configurations: a starfish-like robot, a brittle star robot, a snake robot, a 3D gripper, and a ring-shaped robot. These configurations highlight the ease of assembly, adaptability, and functional diversity of the SoftSnap modules. The SoftSnap modular system offers a scalable, snap-together approach to simplifying soft robot prototyping, making it easier for researchers to explore untethered soft robotic systems rapidly.
Scalable underwater assembly with reconfigurable visual fiducials
Oct 30, 2023



We present a scalable combined localization infrastructure deployment and task planning algorithm for underwater assembly. Infrastructure is autonomously modified to suit the needs of manipulation tasks based on an uncertainty model on the infrastructure's positional accuracy. Our uncertainty model can be combined with the noise characteristics from multiple devices. For the task planning problem, we propose a layer-based clustering approach that completes the manipulation tasks one cluster at a time. We employ movable visual fiducial markers as infrastructure and an autonomous underwater vehicle (AUV) for manipulation tasks. The proposed task planning algorithm is computationally simple, and we implement it on AUV without any offline computation requirements. Combined hardware experiments and simulations over large datasets show that the proposed technique is scalable to large areas.
Buoyancy enabled autonomous underwater construction with cement blocks
May 09, 2023We present the first free-floating autonomous underwater construction system capable of using active ballasting to transport cement building blocks efficiently. It is the first free-floating autonomous construction robot to use a paired set of resources: compressed air for buoyancy and a battery for thrusters. In construction trials, our system built structures of up to 12 components and weighing up to 100Kg (75Kg in water). Our system achieves this performance by combining a novel one-degree-of-freedom manipulator, a novel two-component cement block construction system that corrects errors in placement, and a simple active ballasting system combined with compliant placement and grasp behaviors. The passive error correcting components of the system minimize the required complexity in sensing and control. We also explore the problem of buoyancy allocation for building structures at scale by defining a convex program which allocates buoyancy to minimize the predicted energy cost for transporting blocks.
Soft Lattice Modules that Behave Independently and Collectively
Oct 21, 2021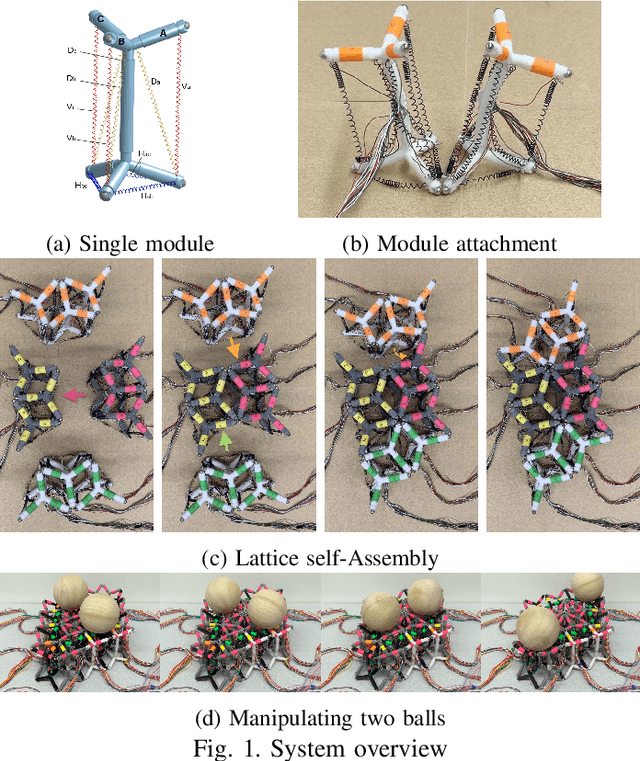

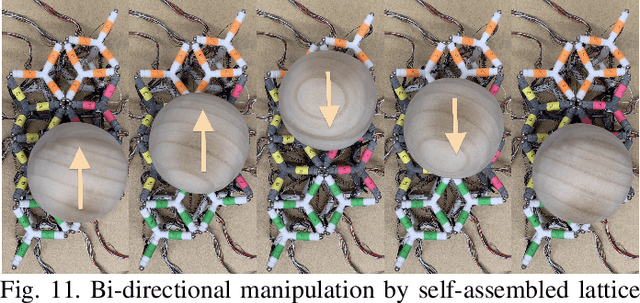
Natural systems integrate the work of many sub-units (cells) toward a large-scale unified goal (morphological and behavioral), which can counteract the effects of unexpected experiences, damage, or simply changes in tasks demands. In this paper, we exploit the opportunities presented by soft, modular, and tensegrity robots to introduce soft lattice modules that parallel the sub-units seen in biological systems. The soft lattice modules are comprised of 3D printed plastic "skeletons", linear contracting shape memory alloy spring actuators, and permanent magnets that enable adhesion between modules. The soft lattice modules are capable of independent locomotion, and can also join with other modules to achieve collective, self-assembled, larger scale tasks such as collective locomotion and moving an object across the surface of the lattice assembly. This work represents a preliminary step toward soft modular systems capable of independent and collective behaviors, and provide a platform for future studies on distributed control.
Piecewise linear regressions for approximating distance metrics
Feb 27, 2020
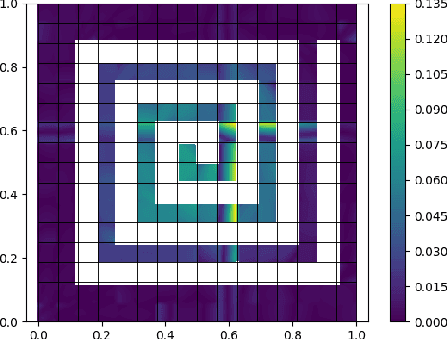
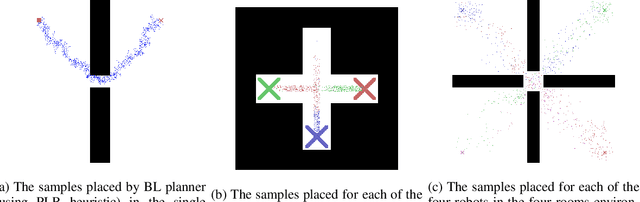
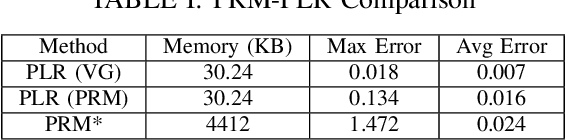
This paper presents a data structure that summarizes distances between configurations across a robot configuration space, using a binary space partition whose cells contain parameters used for a locally linear approximation of the distance function. Querying the data structure is extremely fast, particularly when compared to the graph search required for querying Probabilistic Roadmaps, and memory requirements are promising. The paper explores the use of the data structure constructed for a single robot to provide a heuristic for challenging multi-robot motion planning problems. Potential applications also include the use of remote computation to analyze the space of robot motions, which then might be transmitted on-demand to robots with fewer computational resources.
PuzzleFlex: kinematic motion of chains with loose joints
Jun 20, 2019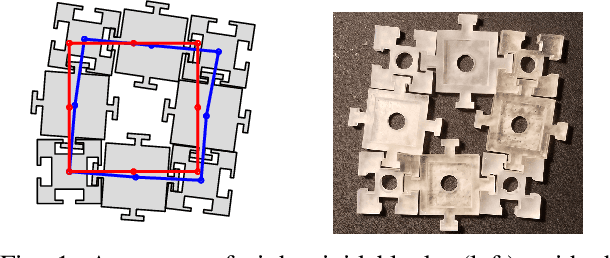
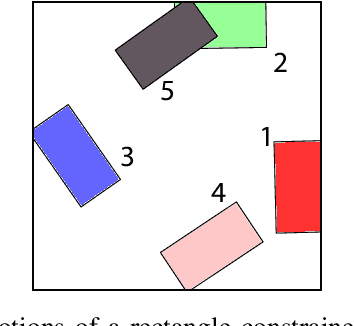

This paper presents a method of computing free motions of a planar assembly of rigid bodies connected by loose joints. Joints are modeled using local distance constraints, which are then linearized with respect to configuration space velocities, yielding a linear programming formulation that allows analysis of systems with thousands of rigid bodies. Potential applications include analysis of collections of modular robots, structural stability perturbation analysis, tolerance analysis for mechanical systems,and formation control of mobile robots.
Towards Physically Safe Reinforcement Learning under Supervision
Jan 19, 2019
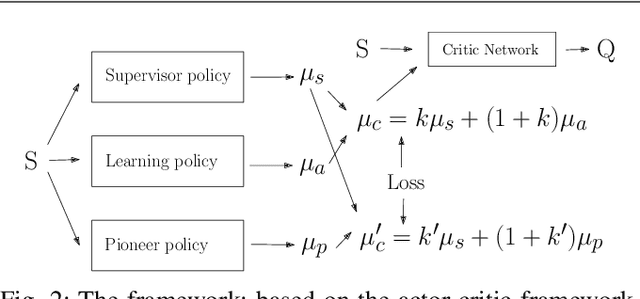
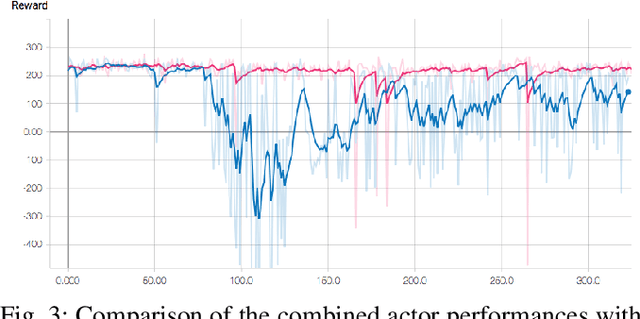

This paper addresses the question of how a previously available control policy $\pi_s$ can be used as a supervisor to more quickly and safely train a new learned control policy $\pi_L$ for a robot. A weighted average of the supervisor and learned policies is used during trials, with a heavier weight initially on the supervisor, in order to allow safe and useful physical trials while the learned policy is still ineffective. During the process, the weight is adjusted to favor the learned policy. As weights are adjusted, the learned network must compensate so as to give safe and reasonable outputs under the different weights. A pioneer network is introduced that pre-learns a policy that performs similarly to the current learned policy under the planned next step for new weights; this pioneer network then replaces the currently learned network in the next set of trials. Experiments in OpenAI Gym demonstrate the effectiveness of the proposed method.