 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrasp Synthesis for Novel Objects Using Heuristic-based and Data-driven Active Vision Methods
Apr 23, 2021



In this work, we present several heuristic-based and data-driven active vision strategies for viewpoint optimization of an arm-mounted depth camera for the purpose of aiding robotic grasping. These strategies aim to efficiently collect data to boost the performance of an underlying grasp synthesis algorithm. We created an open-source benchmarking platform in simulation (https://github.com/galenbr/2021ActiveVision), and provide an extensive study for assessing the performance of the proposed methods as well as comparing them against various baseline strategies. We also provide an experimental study with a real-world setup by utilizing an existing grasping planning benchmark in the literature. With these analyses, we were able to quantitatively demonstrate the versatility of heuristic methods that prioritize certain types of exploration, and qualitatively show their robustness to both novel objects and the transition from simulation to the real world. We identified scenarios in which our methods did not perform well and scenarios that are objectively difficult, and present a discussion on which avenues for future research show promise.
Piecewise linear regressions for approximating distance metrics
Feb 27, 2020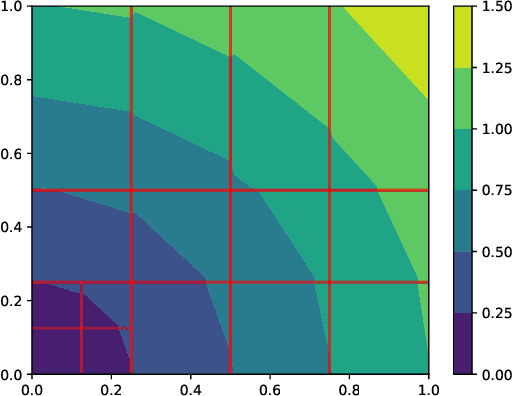
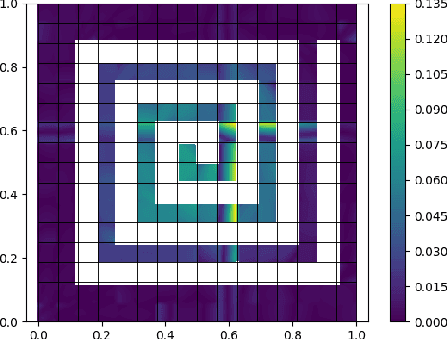
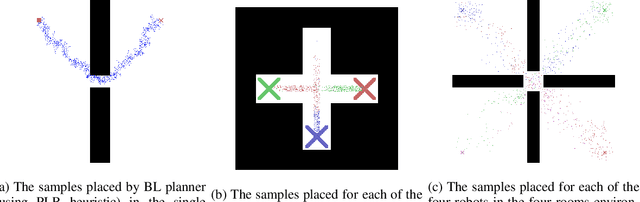
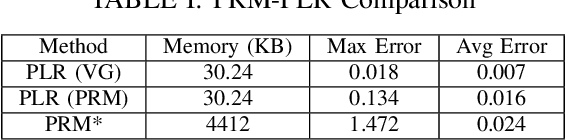
This paper presents a data structure that summarizes distances between configurations across a robot configuration space, using a binary space partition whose cells contain parameters used for a locally linear approximation of the distance function. Querying the data structure is extremely fast, particularly when compared to the graph search required for querying Probabilistic Roadmaps, and memory requirements are promising. The paper explores the use of the data structure constructed for a single robot to provide a heuristic for challenging multi-robot motion planning problems. Potential applications also include the use of remote computation to analyze the space of robot motions, which then might be transmitted on-demand to robots with fewer computational resources.