 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAcoustic Neural 3D Reconstruction Under Pose Drift
Mar 11, 2025We consider the problem of optimizing neural implicit surfaces for 3D reconstruction using acoustic images collected with drifting sensor poses. The accuracy of current state-of-the-art 3D acoustic modeling algorithms is highly dependent on accurate pose estimation; small errors in sensor pose can lead to severe reconstruction artifacts. In this paper, we propose an algorithm that jointly optimizes the neural scene representation and sonar poses. Our algorithm does so by parameterizing the 6DoF poses as learnable parameters and backpropagating gradients through the neural renderer and implicit representation. We validated our algorithm on both real and simulated datasets. It produces high-fidelity 3D reconstructions even under significant pose drift.
High-Speed Dynamic 3D Imaging with Sensor Fusion Splatting
Feb 07, 2025



Capturing and reconstructing high-speed dynamic 3D scenes has numerous applications in computer graphics, vision, and interdisciplinary fields such as robotics, aerodynamics, and evolutionary biology. However, achieving this using a single imaging modality remains challenging. For instance, traditional RGB cameras suffer from low frame rates, limited exposure times, and narrow baselines. To address this, we propose a novel sensor fusion approach using Gaussian splatting, which combines RGB, depth, and event cameras to capture and reconstruct deforming scenes at high speeds. The key insight of our method lies in leveraging the complementary strengths of these imaging modalities: RGB cameras capture detailed color information, event cameras record rapid scene changes with microsecond resolution, and depth cameras provide 3D scene geometry. To unify the underlying scene representation across these modalities, we represent the scene using deformable 3D Gaussians. To handle rapid scene movements, we jointly optimize the 3D Gaussian parameters and their temporal deformation fields by integrating data from all three sensor modalities. This fusion enables efficient, high-quality imaging of fast and complex scenes, even under challenging conditions such as low light, narrow baselines, or rapid motion. Experiments on synthetic and real datasets captured with our prototype sensor fusion setup demonstrate that our method significantly outperforms state-of-the-art techniques, achieving noticeable improvements in both rendering fidelity and structural accuracy.
Event fields: Capturing light fields at high speed, resolution, and dynamic range
Dec 09, 2024



Event cameras, which feature pixels that independently respond to changes in brightness, are becoming increasingly popular in high-speed applications due to their lower latency, reduced bandwidth requirements, and enhanced dynamic range compared to traditional frame-based cameras. Numerous imaging and vision techniques have leveraged event cameras for high-speed scene understanding by capturing high-framerate, high-dynamic range videos, primarily utilizing the temporal advantages inherent to event cameras. Additionally, imaging and vision techniques have utilized the light field-a complementary dimension to temporal information-for enhanced scene understanding. In this work, we propose "Event Fields", a new approach that utilizes innovative optical designs for event cameras to capture light fields at high speed. We develop the underlying mathematical framework for Event Fields and introduce two foundational frameworks to capture them practically: spatial multiplexing to capture temporal derivatives and temporal multiplexing to capture angular derivatives. To realize these, we design two complementary optical setups one using a kaleidoscope for spatial multiplexing and another using a galvanometer for temporal multiplexing. We evaluate the performance of both designs using a custom-built simulator and real hardware prototypes, showcasing their distinct benefits. Our event fields unlock the full advantages of typical light fields-like post-capture refocusing and depth estimation-now supercharged for high-speed and high-dynamic range scenes. This novel light-sensing paradigm opens doors to new applications in photography, robotics, and AR/VR, and presents fresh challenges in rendering and machine learning.
Structured light with a million light planes per second
Nov 27, 2024



We introduce a structured light system that captures full-frame depth at rates of a thousand frames per second, four times faster than the previous state of the art. Our key innovation to this end is the design of an acousto-optic light scanning device that can scan light planes at rates up to two million planes per second. We combine this device with an event camera for structured light, using the sparse events triggered on the camera as we sweep a light plane on the scene for depth triangulation. In contrast to prior work, where light scanning is the bottleneck towards faster structured light operation, our light scanning device is three orders of magnitude faster than the event camera's full-frame bandwidth, thus allowing us to take full advantage of the event camera's fast operation. To surpass this bandwidth, we additionally demonstrate adaptive scanning of only regions of interest, at speeds an order of magnitude faster than the theoretical full-frame limit for event cameras.
Enhancing Autonomous Navigation by Imaging Hidden Objects using Single-Photon LiDAR
Oct 04, 2024



Robust autonomous navigation in environments with limited visibility remains a critical challenge in robotics. We present a novel approach that leverages Non-Line-of-Sight (NLOS) sensing using single-photon LiDAR to improve visibility and enhance autonomous navigation. Our method enables mobile robots to "see around corners" by utilizing multi-bounce light information, effectively expanding their perceptual range without additional infrastructure. We propose a three-module pipeline: (1) Sensing, which captures multi-bounce histograms using SPAD-based LiDAR; (2) Perception, which estimates occupancy maps of hidden regions from these histograms using a convolutional neural network; and (3) Control, which allows a robot to follow safe paths based on the estimated occupancy. We evaluate our approach through simulations and real-world experiments on a mobile robot navigating an L-shaped corridor with hidden obstacles. Our work represents the first experimental demonstration of NLOS imaging for autonomous navigation, paving the way for safer and more efficient robotic systems operating in complex environments. We also contribute a novel dynamics-integrated transient rendering framework for simulating NLOS scenarios, facilitating future research in this domain.
Z-Splat: Z-Axis Gaussian Splatting for Camera-Sonar Fusion
Apr 06, 2024



Differentiable 3D-Gaussian splatting (GS) is emerging as a prominent technique in computer vision and graphics for reconstructing 3D scenes. GS represents a scene as a set of 3D Gaussians with varying opacities and employs a computationally efficient splatting operation along with analytical derivatives to compute the 3D Gaussian parameters given scene images captured from various viewpoints. Unfortunately, capturing surround view ($360^{\circ}$ viewpoint) images is impossible or impractical in many real-world imaging scenarios, including underwater imaging, rooms inside a building, and autonomous navigation. In these restricted baseline imaging scenarios, the GS algorithm suffers from a well-known 'missing cone' problem, which results in poor reconstruction along the depth axis. In this manuscript, we demonstrate that using transient data (from sonars) allows us to address the missing cone problem by sampling high-frequency data along the depth axis. We extend the Gaussian splatting algorithms for two commonly used sonars and propose fusion algorithms that simultaneously utilize RGB camera data and sonar data. Through simulations, emulations, and hardware experiments across various imaging scenarios, we show that the proposed fusion algorithms lead to significantly better novel view synthesis (5 dB improvement in PSNR) and 3D geometry reconstruction (60% lower Chamfer distance).
AONeuS: A Neural Rendering Framework for Acoustic-Optical Sensor Fusion
Feb 05, 2024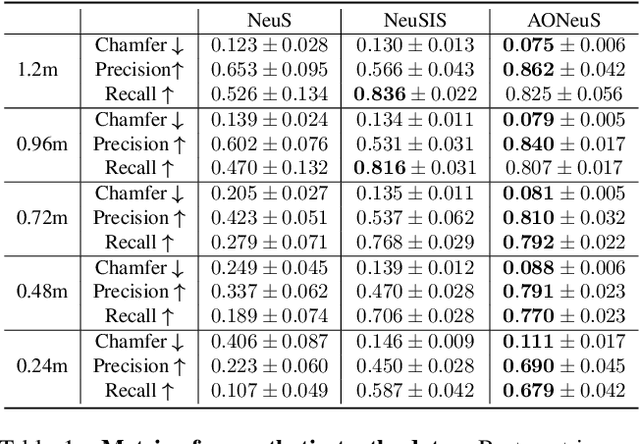

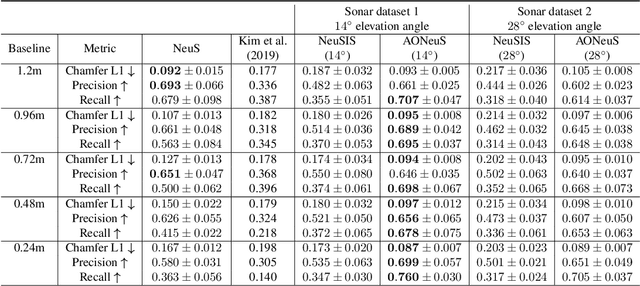

Underwater perception and 3D surface reconstruction are challenging problems with broad applications in construction, security, marine archaeology, and environmental monitoring. Treacherous operating conditions, fragile surroundings, and limited navigation control often dictate that submersibles restrict their range of motion and, thus, the baseline over which they can capture measurements. In the context of 3D scene reconstruction, it is well-known that smaller baselines make reconstruction more challenging. Our work develops a physics-based multimodal acoustic-optical neural surface reconstruction framework (AONeuS) capable of effectively integrating high-resolution RGB measurements with low-resolution depth-resolved imaging sonar measurements. By fusing these complementary modalities, our framework can reconstruct accurate high-resolution 3D surfaces from measurements captured over heavily-restricted baselines. Through extensive simulations and in-lab experiments, we demonstrate that AONeuS dramatically outperforms recent RGB-only and sonar-only inverse-differentiable-rendering--based surface reconstruction methods. A website visualizing the results of our paper is located at this address: https://aoneus.github.io/
Scalable underwater assembly with reconfigurable visual fiducials
Oct 30, 2023



We present a scalable combined localization infrastructure deployment and task planning algorithm for underwater assembly. Infrastructure is autonomously modified to suit the needs of manipulation tasks based on an uncertainty model on the infrastructure's positional accuracy. Our uncertainty model can be combined with the noise characteristics from multiple devices. For the task planning problem, we propose a layer-based clustering approach that completes the manipulation tasks one cluster at a time. We employ movable visual fiducial markers as infrastructure and an autonomous underwater vehicle (AUV) for manipulation tasks. The proposed task planning algorithm is computationally simple, and we implement it on AUV without any offline computation requirements. Combined hardware experiments and simulations over large datasets show that the proposed technique is scalable to large areas.
Neural Volumetric Reconstruction for Coherent Synthetic Aperture Sonar
Jun 16, 2023Synthetic aperture sonar (SAS) measures a scene from multiple views in order to increase the resolution of reconstructed imagery. Image reconstruction methods for SAS coherently combine measurements to focus acoustic energy onto the scene. However, image formation is typically under-constrained due to a limited number of measurements and bandlimited hardware, which limits the capabilities of existing reconstruction methods. To help meet these challenges, we design an analysis-by-synthesis optimization that leverages recent advances in neural rendering to perform coherent SAS imaging. Our optimization enables us to incorporate physics-based constraints and scene priors into the image formation process. We validate our method on simulation and experimental results captured in both air and water. We demonstrate both quantitatively and qualitatively that our method typically produces superior reconstructions than existing approaches. We share code and data for reproducibility.
Adaptive Gating for Single-Photon 3D Imaging
Nov 30, 2021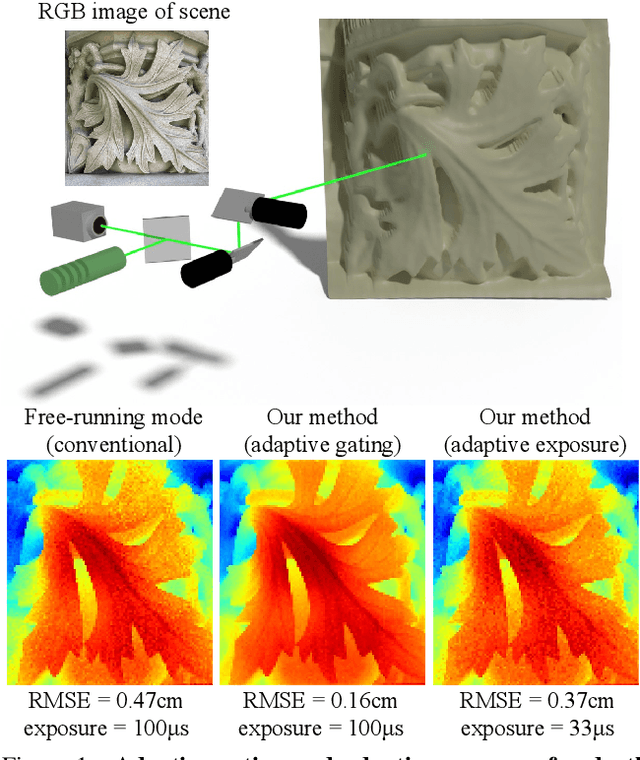
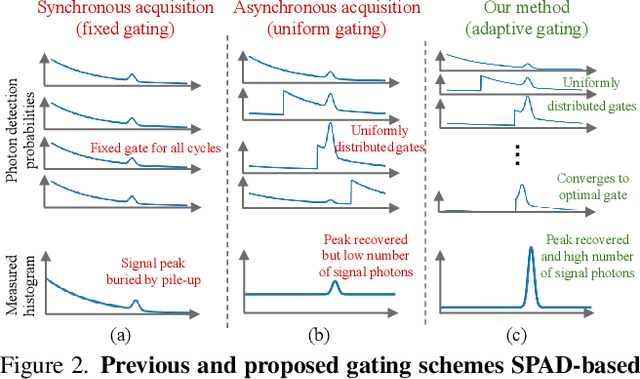
Single-photon avalanche diodes (SPADs) are growing in popularity for depth sensing tasks. However, SPADs still struggle in the presence of high ambient light due to the effects of pile-up. Conventional techniques leverage fixed or asynchronous gating to minimize pile-up effects, but these gating schemes are all non-adaptive, as they are unable to incorporate factors such as scene priors and previous photon detections into their gating strategy. We propose an adaptive gating scheme built upon Thompson sampling. Adaptive gating periodically updates the gate position based on prior photon observations in order to minimize depth errors. Our experiments show that our gating strategy results in significantly reduced depth reconstruction error and acquisition time, even when operating outdoors under strong sunlight conditions.