 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal2SAM2Real: Generative 3D Caches as Complementary Context for Video Diffusion
May 29, 2026While Video Diffusion Models (VDMs) excel at synthesizing high-fidelity videos, enabling precise camera and scene control remains challenging. Existing methods predominantly rely on implicit diffusion priors to generate unobserved regions, inevitably leading to structural collapse during high-dynamic movements or complex occlusions. To address this challenge, we propose Real2SAM2Real, a framework that leverages 3D lifting models (e.g., SAM3D) to extract an explicitly editable 3D cache, serving as a robust geometric scaffold for the VDM. By capturing the entire 3D volume of foreground entities rather than just their visible shells, this cache injects holistic spatial priors into the VDM, providing dependable 3D-aware guidance for complex scene dynamics. To effectively leverage this 3D guidance while preserving pre-trained priors, we design a Soft Spatial-Aligned Injection mechanism alongside a minimally invasive fine-tuning strategy tailored for VDMs. Furthermore, we employ masked normal maps as a cross-modal bridge to construct a 3D-free data curation and perturbation pipeline. Extensive experiments demonstrate that Real2SAM2Real enables precise, decoupled control over both camera trajectories and multi-entity motions. By utilizing the complementary context from generative 3D caches, our framework overcomes typical breakdowns caused by over-reliance on diffusion priors, maintaining exceptional spatiotemporal consistency under large camera shifts and severe occlusions. Crucially, by decoupling geometry from appearance, our VDM-tailored 3D cache eradicates perspective ambiguities caused by structural holes and erroneous facades, as well as misleading cues from reflections and refractions. Project website is available at https://jiayi-wu-leo.github.io/real2sam2real
Learning Illumination Control in Diffusion Models
Apr 27, 2026Controlling illumination in images is essential for photography and visual content creation. While closed-source models have demonstrated impressive illumination control, open-source alternatives either require heavy control inputs like depth maps or do not release their data and code. We present a fully open-source and reproducible pipeline for learning illumination control in diffusion models. Our approach builds a data engine that transforms well-lit images into supervised training triplets consisting of a poorly-illuminated input image, a natural language lighting instruction, and a well-illuminated output image. We finetune a diffusion model on this data and demonstrate significant improvements over baseline SD 1.5, SDXL, and FLUX.1-dev models in perceptual similarity, structural similarity, and identity preservation. Our work provides a reproducible solution built entirely with open-source tools and publicly available data. We release all our code, data, and model weights publicly.
LaVR: Scene Latent Conditioned Generative Video Trajectory Re-Rendering using Large 4D Reconstruction Models
Jan 21, 2026Given a monocular video, the goal of video re-rendering is to generate views of the scene from a novel camera trajectory. Existing methods face two distinct challenges. Geometrically unconditioned models lack spatial awareness, leading to drift and deformation under viewpoint changes. On the other hand, geometrically-conditioned models depend on estimated depth and explicit reconstruction, making them susceptible to depth inaccuracies and calibration errors. We propose to address these challenges by using the implicit geometric knowledge embedded in the latent space of a large 4D reconstruction model to condition the video generation process. These latents capture scene structure in a continuous space without explicit reconstruction. Therefore, they provide a flexible representation that allows the pretrained diffusion prior to regularize errors more effectively. By jointly conditioning on these latents and source camera poses, we demonstrate that our model achieves state-of-the-art results on the video re-rendering task. Project webpage is https://lavr-4d-scene-rerender.github.io/
Underwater Monocular Metric Depth Estimation: Real-World Benchmarks and Synthetic Fine-Tuning
Jul 02, 2025Monocular depth estimation has recently advanced to provide not only relative but also metric depth predictions. However, its reliability in underwater environments remains limited due to light attenuation and scattering, color distortion, turbidity, and the lack of high-quality metric ground-truth data. In this paper, we present a comprehensive benchmark of zero-shot and fine-tuned monocular metric depth estimation models on real-world underwater datasets with metric depth annotations, such as FLSea and SQUID. We evaluate a diverse set of state-of-the-art models across a range of underwater conditions with different ranges. Our results show that large-scale models trained on terrestrial (real or synthetic) data, while effective in in-air settings, perform poorly underwater due to significant domain shifts. To address this, we fine-tune Depth Anything V2 with a ViT-S backbone encoder on a synthetic underwater variant of the Hypersim dataset, which we generated using a physically based underwater image formation model. We demonstrate our fine-tuned model consistently improves performance across all benchmarks and outperforms baselines trained only on the clean in-air Hypersim dataset. Our study provides a detailed evaluation and visualization for monocular metric depth estimation in underwater scenes, highlighting the importance of domain adaptation and scale-aware supervision for achieving robust and generalizable metric depth predictions in challenging underwater environments for future research.
Parametric Shadow Control for Portrait Generationin Text-to-Image Diffusion Models
Mar 27, 2025Text-to-image diffusion models excel at generating diverse portraits, but lack intuitive shadow control. Existing editing approaches, as post-processing, struggle to offer effective manipulation across diverse styles. Additionally, these methods either rely on expensive real-world light-stage data collection or require extensive computational resources for training. To address these limitations, we introduce Shadow Director, a method that extracts and manipulates hidden shadow attributes within well-trained diffusion models. Our approach uses a small estimation network that requires only a few thousand synthetic images and hours of training-no costly real-world light-stage data needed. Shadow Director enables parametric and intuitive control over shadow shape, placement, and intensity during portrait generation while preserving artistic integrity and identity across diverse styles. Despite training only on synthetic data built on real-world identities, it generalizes effectively to generated portraits with diverse styles, making it a more accessible and resource-friendly solution.
CodedVO: Coded Visual Odometry
Jul 25, 2024



Autonomous robots often rely on monocular cameras for odometry estimation and navigation. However, the scale ambiguity problem presents a critical barrier to effective monocular visual odometry. In this paper, we present CodedVO, a novel monocular visual odometry method that overcomes the scale ambiguity problem by employing custom optics to physically encode metric depth information into imagery. By incorporating this information into our odometry pipeline, we achieve state-of-the-art performance in monocular visual odometry with a known scale. We evaluate our method in diverse indoor environments and demonstrate its robustness and adaptability. We achieve a 0.08m average trajectory error in odometry evaluation on the ICL-NUIM indoor odometry dataset.
* 7 pages, 4 figures, IEEE ROBOTICS AND AUTOMATION LETTERS
CodedEvents: Optimal Point-Spread-Function Engineering for 3D-Tracking with Event Cameras
Jun 13, 2024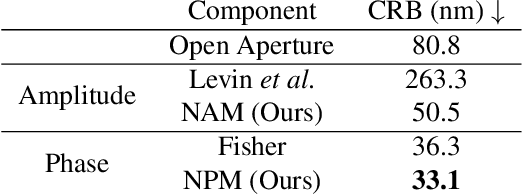
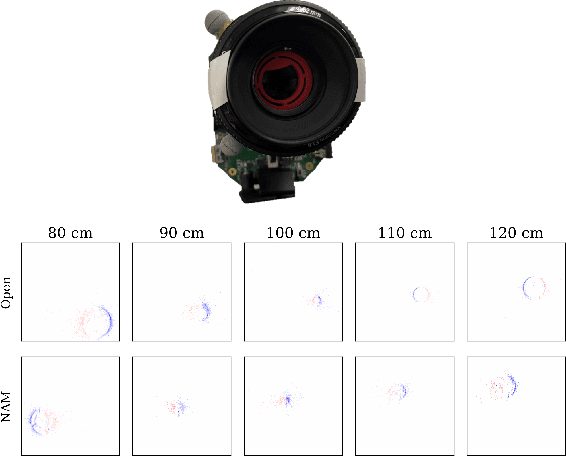

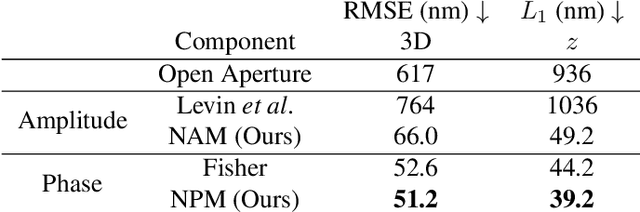
Point-spread-function (PSF) engineering is a well-established computational imaging technique that uses phase masks and other optical elements to embed extra information (e.g., depth) into the images captured by conventional CMOS image sensors. To date, however, PSF-engineering has not been applied to neuromorphic event cameras; a powerful new image sensing technology that responds to changes in the log-intensity of light. This paper establishes theoretical limits (Cram\'er Rao bounds) on 3D point localization and tracking with PSF-engineered event cameras. Using these bounds, we first demonstrate that existing Fisher phase masks are already near-optimal for localizing static flashing point sources (e.g., blinking fluorescent molecules). We then demonstrate that existing designs are sub-optimal for tracking moving point sources and proceed to use our theory to design optimal phase masks and binary amplitude masks for this task. To overcome the non-convexity of the design problem, we leverage novel implicit neural representation based parameterizations of the phase and amplitude masks. We demonstrate the efficacy of our designs through extensive simulations. We also validate our method with a simple prototype.
Z-Splat: Z-Axis Gaussian Splatting for Camera-Sonar Fusion
Apr 06, 2024



Differentiable 3D-Gaussian splatting (GS) is emerging as a prominent technique in computer vision and graphics for reconstructing 3D scenes. GS represents a scene as a set of 3D Gaussians with varying opacities and employs a computationally efficient splatting operation along with analytical derivatives to compute the 3D Gaussian parameters given scene images captured from various viewpoints. Unfortunately, capturing surround view ($360^{\circ}$ viewpoint) images is impossible or impractical in many real-world imaging scenarios, including underwater imaging, rooms inside a building, and autonomous navigation. In these restricted baseline imaging scenarios, the GS algorithm suffers from a well-known 'missing cone' problem, which results in poor reconstruction along the depth axis. In this manuscript, we demonstrate that using transient data (from sonars) allows us to address the missing cone problem by sampling high-frequency data along the depth axis. We extend the Gaussian splatting algorithms for two commonly used sonars and propose fusion algorithms that simultaneously utilize RGB camera data and sonar data. Through simulations, emulations, and hardware experiments across various imaging scenarios, we show that the proposed fusion algorithms lead to significantly better novel view synthesis (5 dB improvement in PSNR) and 3D geometry reconstruction (60% lower Chamfer distance).
TimeRewind: Rewinding Time with Image-and-Events Video Diffusion
Mar 20, 2024



This paper addresses the novel challenge of ``rewinding'' time from a single captured image to recover the fleeting moments missed just before the shutter button is pressed. This problem poses a significant challenge in computer vision and computational photography, as it requires predicting plausible pre-capture motion from a single static frame, an inherently ill-posed task due to the high degree of freedom in potential pixel movements. We overcome this challenge by leveraging the emerging technology of neuromorphic event cameras, which capture motion information with high temporal resolution, and integrating this data with advanced image-to-video diffusion models. Our proposed framework introduces an event motion adaptor conditioned on event camera data, guiding the diffusion model to generate videos that are visually coherent and physically grounded in the captured events. Through extensive experimentation, we demonstrate the capability of our approach to synthesize high-quality videos that effectively ``rewind'' time, showcasing the potential of combining event camera technology with generative models. Our work opens new avenues for research at the intersection of computer vision, computational photography, and generative modeling, offering a forward-thinking solution to capturing missed moments and enhancing future consumer cameras and smartphones. Please see the project page at https://timerewind.github.io/ for video results and code release.
ConVRT: Consistent Video Restoration Through Turbulence with Test-time Optimization of Neural Video Representations
Dec 07, 2023



tmospheric turbulence presents a significant challenge in long-range imaging. Current restoration algorithms often struggle with temporal inconsistency, as well as limited generalization ability across varying turbulence levels and scene content different than the training data. To tackle these issues, we introduce a self-supervised method, Consistent Video Restoration through Turbulence (ConVRT) a test-time optimization method featuring a neural video representation designed to enhance temporal consistency in restoration. A key innovation of ConVRT is the integration of a pretrained vision-language model (CLIP) for semantic-oriented supervision, which steers the restoration towards sharp, photorealistic images in the CLIP latent space. We further develop a principled selection strategy of text prompts, based on their statistical correlation with a perceptual metric. ConVRT's test-time optimization allows it to adapt to a wide range of real-world turbulence conditions, effectively leveraging the insights gained from pre-trained models on simulated data. ConVRT offers a comprehensive and effective solution for mitigating real-world turbulence in dynamic videos.