 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParametric Shadow Control for Portrait Generationin Text-to-Image Diffusion Models
Mar 27, 2025Text-to-image diffusion models excel at generating diverse portraits, but lack intuitive shadow control. Existing editing approaches, as post-processing, struggle to offer effective manipulation across diverse styles. Additionally, these methods either rely on expensive real-world light-stage data collection or require extensive computational resources for training. To address these limitations, we introduce Shadow Director, a method that extracts and manipulates hidden shadow attributes within well-trained diffusion models. Our approach uses a small estimation network that requires only a few thousand synthetic images and hours of training-no costly real-world light-stage data needed. Shadow Director enables parametric and intuitive control over shadow shape, placement, and intensity during portrait generation while preserving artistic integrity and identity across diverse styles. Despite training only on synthetic data built on real-world identities, it generalizes effectively to generated portraits with diverse styles, making it a more accessible and resource-friendly solution.
Flash-Split: 2D Reflection Removal with Flash Cues and Latent Diffusion Separation
Dec 31, 2024
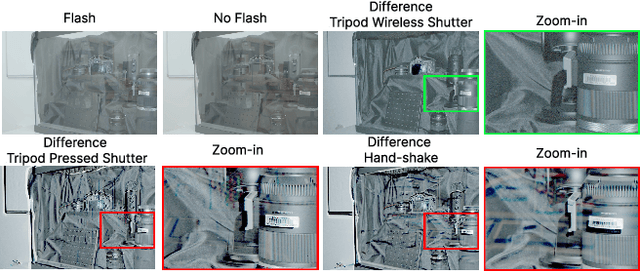
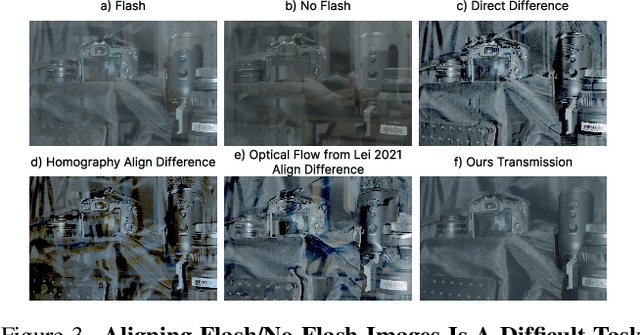
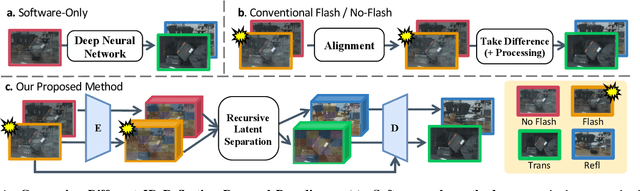
Transparent surfaces, such as glass, create complex reflections that obscure images and challenge downstream computer vision applications. We introduce Flash-Split, a robust framework for separating transmitted and reflected light using a single (potentially misaligned) pair of flash/no-flash images. Our core idea is to perform latent-space reflection separation while leveraging the flash cues. Specifically, Flash-Split consists of two stages. Stage 1 separates apart the reflection latent and transmission latent via a dual-branch diffusion model conditioned on an encoded flash/no-flash latent pair, effectively mitigating the flash/no-flash misalignment issue. Stage 2 restores high-resolution, faithful details to the separated latents, via a cross-latent decoding process conditioned on the original images before separation. By validating Flash-Split on challenging real-world scenes, we demonstrate state-of-the-art reflection separation performance and significantly outperform the baseline methods.
Flash-Splat: 3D Reflection Removal with Flash Cues and Gaussian Splats
Oct 03, 2024We introduce a simple yet effective approach for separating transmitted and reflected light. Our key insight is that the powerful novel view synthesis capabilities provided by modern inverse rendering methods (e.g.,~3D Gaussian splatting) allow one to perform flash/no-flash reflection separation using unpaired measurements -- this relaxation dramatically simplifies image acquisition over conventional paired flash/no-flash reflection separation methods. Through extensive real-world experiments, we demonstrate our method, Flash-Splat, accurately reconstructs both transmitted and reflected scenes in 3D. Our method outperforms existing 3D reflection separation methods, which do not leverage illumination control, by a large margin. Our project webpage is at https://flash-splat.github.io/.
CodedVO: Coded Visual Odometry
Jul 25, 2024



Autonomous robots often rely on monocular cameras for odometry estimation and navigation. However, the scale ambiguity problem presents a critical barrier to effective monocular visual odometry. In this paper, we present CodedVO, a novel monocular visual odometry method that overcomes the scale ambiguity problem by employing custom optics to physically encode metric depth information into imagery. By incorporating this information into our odometry pipeline, we achieve state-of-the-art performance in monocular visual odometry with a known scale. We evaluate our method in diverse indoor environments and demonstrate its robustness and adaptability. We achieve a 0.08m average trajectory error in odometry evaluation on the ICL-NUIM indoor odometry dataset.
* 7 pages, 4 figures, IEEE ROBOTICS AND AUTOMATION LETTERS
CodedEvents: Optimal Point-Spread-Function Engineering for 3D-Tracking with Event Cameras
Jun 13, 2024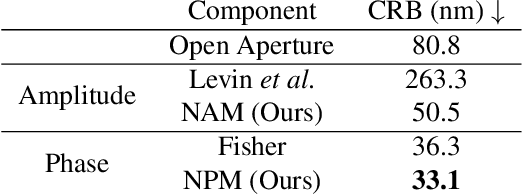
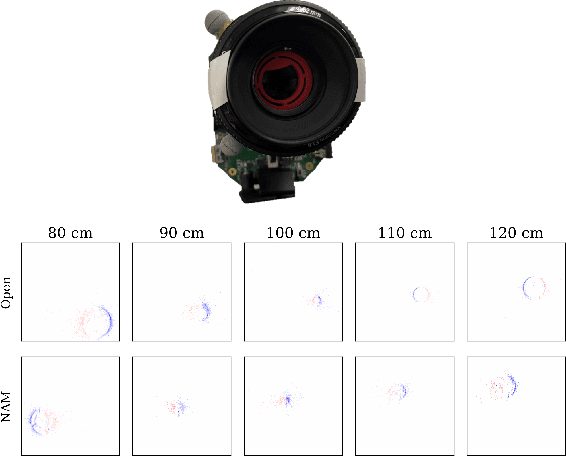

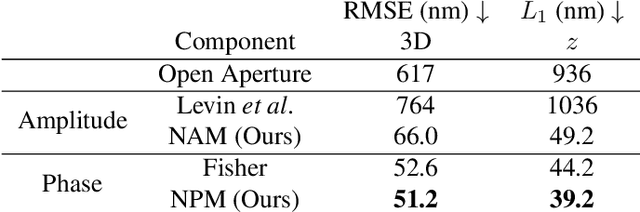
Point-spread-function (PSF) engineering is a well-established computational imaging technique that uses phase masks and other optical elements to embed extra information (e.g., depth) into the images captured by conventional CMOS image sensors. To date, however, PSF-engineering has not been applied to neuromorphic event cameras; a powerful new image sensing technology that responds to changes in the log-intensity of light. This paper establishes theoretical limits (Cram\'er Rao bounds) on 3D point localization and tracking with PSF-engineered event cameras. Using these bounds, we first demonstrate that existing Fisher phase masks are already near-optimal for localizing static flashing point sources (e.g., blinking fluorescent molecules). We then demonstrate that existing designs are sub-optimal for tracking moving point sources and proceed to use our theory to design optimal phase masks and binary amplitude masks for this task. To overcome the non-convexity of the design problem, we leverage novel implicit neural representation based parameterizations of the phase and amplitude masks. We demonstrate the efficacy of our designs through extensive simulations. We also validate our method with a simple prototype.
TiDy-PSFs: Computational Imaging with Time-Averaged Dynamic Point-Spread-Functions
Mar 30, 2023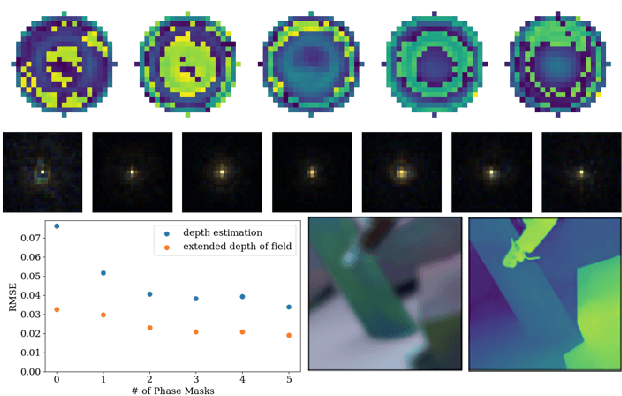
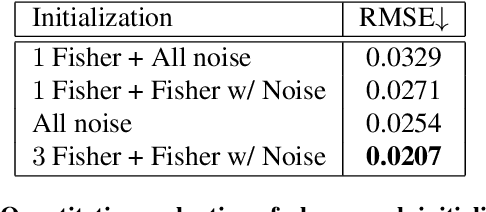
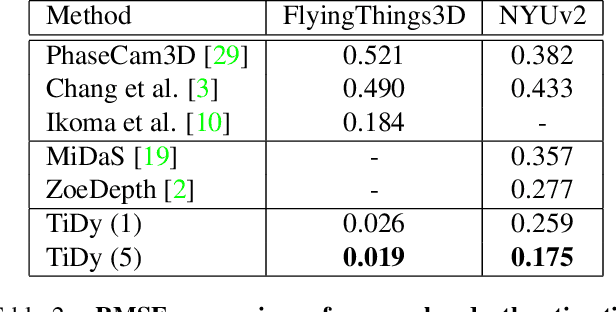
Point-spread-function (PSF) engineering is a powerful computational imaging techniques wherein a custom phase mask is integrated into an optical system to encode additional information into captured images. Used in combination with deep learning, such systems now offer state-of-the-art performance at monocular depth estimation, extended depth-of-field imaging, lensless imaging, and other tasks. Inspired by recent advances in spatial light modulator (SLM) technology, this paper answers a natural question: Can one encode additional information and achieve superior performance by changing a phase mask dynamically over time? We first prove that the set of PSFs described by static phase masks is non-convex and that, as a result, time-averaged PSFs generated by dynamic phase masks are fundamentally more expressive. We then demonstrate, in simulation, that time-averaged dynamic (TiDy) phase masks can offer substantially improved monocular depth estimation and extended depth-of-field imaging performance.