 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTouchAnything: Diffusion-Guided 3D Reconstruction from Sparse Robot Touches
Apr 10, 2026Accurate object geometry estimation is essential for many downstream tasks, including robotic manipulation and physical interaction. Although vision is the dominant modality for shape perception, it becomes unreliable under occlusions or challenging lighting conditions. In such scenarios, tactile sensing provides direct geometric information through physical contact. However, reconstructing global 3D geometry from sparse local touches alone is fundamentally underconstrained. We present TouchAnything, a framework that leverages a pretrained large-scale 2D vision diffusion model as a semantic and geometric prior for 3D reconstruction from sparse tactile measurements. Unlike prior work that trains category-specific reconstruction networks or learns diffusion models directly from tactile data, we transfer the geometric knowledge encoded in pretrained visual diffusion models to the tactile domain. Given sparse contact constraints and a coarse class-level description of the object, we formulate reconstruction as an optimization problem that enforces tactile consistency while guiding solutions toward shapes consistent with the diffusion prior. Our method reconstructs accurate geometries from only a few touches, outperforms existing baselines, and enables open-world 3D reconstruction of previously unseen object instances. Our project page is https://grange007.github.io/touchanything .
Overcoming Valid Action Suppression in Unmasked Policy Gradient Algorithms
Mar 10, 2026In reinforcement learning environments with state-dependent action validity, action masking consistently outperforms penalty-based handling of invalid actions, yet existing theory only shows that masking preserves the policy gradient theorem. We identify a distinct failure mode of unmasked training: it systematically suppresses valid actions at states the agent has not yet visited. This occurs because gradients pushing down invalid actions at visited states propagate through shared network parameters to unvisited states where those actions are valid. We prove that for softmax policies with shared features, when an action is invalid at visited states but valid at an unvisited state $s^*$, the probability $π(a \mid s^*)$ is bounded by exponential decay due to parameter sharing and the zero-sum identity of softmax logits. This bound reveals that entropy regularization trades off between protecting valid actions and sample efficiency, a tradeoff that masking eliminates. We validate empirically that deep networks exhibit the feature alignment condition required for suppression, and experiments on Craftax, Craftax-Classic, and MiniHack confirm the predicted exponential suppression and demonstrate that feasibility classification enables deployment without oracle masks.
Acoustic Neural 3D Reconstruction Under Pose Drift
Mar 11, 2025We consider the problem of optimizing neural implicit surfaces for 3D reconstruction using acoustic images collected with drifting sensor poses. The accuracy of current state-of-the-art 3D acoustic modeling algorithms is highly dependent on accurate pose estimation; small errors in sensor pose can lead to severe reconstruction artifacts. In this paper, we propose an algorithm that jointly optimizes the neural scene representation and sonar poses. Our algorithm does so by parameterizing the 6DoF poses as learnable parameters and backpropagating gradients through the neural renderer and implicit representation. We validated our algorithm on both real and simulated datasets. It produces high-fidelity 3D reconstructions even under significant pose drift.
Your Learned Constraint is Secretly a Backward Reachable Tube
Jan 26, 2025Inverse Constraint Learning (ICL) is the problem of inferring constraints from safe (i.e., constraint-satisfying) demonstrations. The hope is that these inferred constraints can then be used downstream to search for safe policies for new tasks and, potentially, under different dynamics. Our paper explores the question of what mathematical entity ICL recovers. Somewhat surprisingly, we show that both in theory and in practice, ICL recovers the set of states where failure is inevitable, rather than the set of states where failure has already happened. In the language of safe control, this means we recover a backwards reachable tube (BRT) rather than a failure set. In contrast to the failure set, the BRT depends on the dynamics of the data collection system. We discuss the implications of the dynamics-conditionedness of the recovered constraint on both the sample-efficiency of policy search and the transferability of learned constraints.
Z-Splat: Z-Axis Gaussian Splatting for Camera-Sonar Fusion
Apr 06, 2024



Differentiable 3D-Gaussian splatting (GS) is emerging as a prominent technique in computer vision and graphics for reconstructing 3D scenes. GS represents a scene as a set of 3D Gaussians with varying opacities and employs a computationally efficient splatting operation along with analytical derivatives to compute the 3D Gaussian parameters given scene images captured from various viewpoints. Unfortunately, capturing surround view ($360^{\circ}$ viewpoint) images is impossible or impractical in many real-world imaging scenarios, including underwater imaging, rooms inside a building, and autonomous navigation. In these restricted baseline imaging scenarios, the GS algorithm suffers from a well-known 'missing cone' problem, which results in poor reconstruction along the depth axis. In this manuscript, we demonstrate that using transient data (from sonars) allows us to address the missing cone problem by sampling high-frequency data along the depth axis. We extend the Gaussian splatting algorithms for two commonly used sonars and propose fusion algorithms that simultaneously utilize RGB camera data and sonar data. Through simulations, emulations, and hardware experiments across various imaging scenarios, we show that the proposed fusion algorithms lead to significantly better novel view synthesis (5 dB improvement in PSNR) and 3D geometry reconstruction (60% lower Chamfer distance).
AONeuS: A Neural Rendering Framework for Acoustic-Optical Sensor Fusion
Feb 05, 2024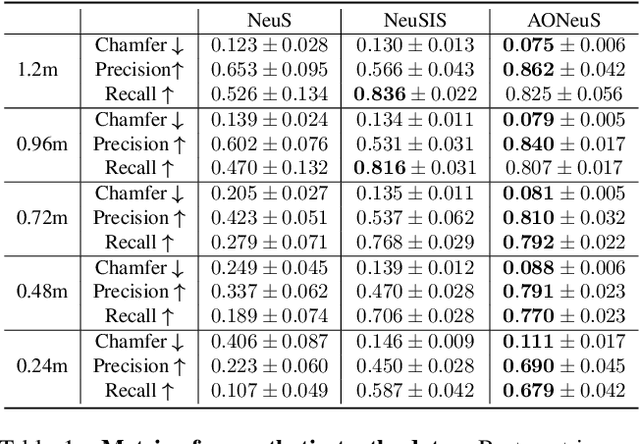

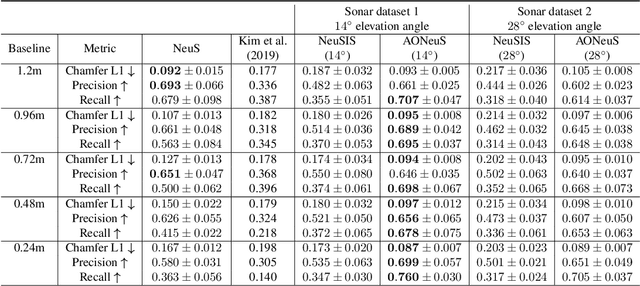

Underwater perception and 3D surface reconstruction are challenging problems with broad applications in construction, security, marine archaeology, and environmental monitoring. Treacherous operating conditions, fragile surroundings, and limited navigation control often dictate that submersibles restrict their range of motion and, thus, the baseline over which they can capture measurements. In the context of 3D scene reconstruction, it is well-known that smaller baselines make reconstruction more challenging. Our work develops a physics-based multimodal acoustic-optical neural surface reconstruction framework (AONeuS) capable of effectively integrating high-resolution RGB measurements with low-resolution depth-resolved imaging sonar measurements. By fusing these complementary modalities, our framework can reconstruct accurate high-resolution 3D surfaces from measurements captured over heavily-restricted baselines. Through extensive simulations and in-lab experiments, we demonstrate that AONeuS dramatically outperforms recent RGB-only and sonar-only inverse-differentiable-rendering--based surface reconstruction methods. A website visualizing the results of our paper is located at this address: https://aoneus.github.io/
Toward Semantic Scene Understanding for Fine-Grained 3D Modeling of Plants
Dec 28, 2023Agricultural robotics is an active research area due to global population growth and expectations of food and labor shortages. Robots can potentially help with tasks such as pruning, harvesting, phenotyping, and plant modeling. However, agricultural automation is hampered by the difficulty in creating high resolution 3D semantic maps in the field that would allow for safe manipulation and navigation. In this paper, we build toward solutions for this issue and showcase how the use of semantics and environmental priors can help in constructing accurate 3D maps for the target application of sorghum. Specifically, we 1) use sorghum seeds as semantic landmarks to build a visual Simultaneous Localization and Mapping (SLAM) system that enables us to map 78\\% of a sorghum range on average, compared to 38% with ORB-SLAM2; and 2) use seeds as semantic features to improve 3D reconstruction of a full sorghum panicle from images taken by a robotic in-hand camera.
Learning Covariances for Estimation with Constrained Bilevel Optimization
Sep 18, 2023We consider the problem of learning error covariance matrices for robotic state estimation. The convergence of a state estimator to the correct belief over the robot state is dependent on the proper tuning of noise models. During inference, these models are used to weigh different blocks of the Jacobian and error vector resulting from linearization and hence, additionally affect the stability and convergence of the non-linear system. We propose a gradient-based method to estimate well-conditioned covariance matrices by formulating the learning process as a constrained bilevel optimization problem over factor graphs. We evaluate our method against baselines across a range of simulated and real-world tasks and demonstrate that our technique converges to model estimates that lead to better solutions as evidenced by the improved tracking accuracy on unseen test trajectories.
Learning Observation Models with Incremental Non-Differentiable Graph Optimizers in the Loop for Robotics State Estimation
Sep 05, 2023We consider the problem of learning observation models for robot state estimation with incremental non-differentiable optimizers in the loop. Convergence to the correct belief over the robot state is heavily dependent on a proper tuning of observation models which serve as input to the optimizer. We propose a gradient-based learning method which converges much quicker to model estimates that lead to solutions of much better quality compared to an existing state-of-the-art method as measured by the tracking accuracy over unseen robot test trajectories.
Autonomous Apple Fruitlet Sizing and Growth Rate Tracking using Computer Vision
Dec 03, 2022Measuring growth rates of apple fruitlets is important because it allows apple growers to determine when to apply chemical thinners to their crops to optimize yield. The current practice of obtaining growth rates involves using calipers to record sizes of fruitlets across multiple days. Due to the number of fruitlets needed to be sized, this method is laborious, time-consuming, and prone to human error. In this paper, we present a computer vision approach to measure the sizes and growth rates of apple fruitlets. With images collected by a hand-held stereo camera, our system detects, segments, and fits ellipses to fruitlets to measure their diameters. To measure growth rates, we utilize an Attentional Graph Neural Network to associate fruitlets across different days. We provide quantitative results on data collected in an apple orchard, and demonstrate that our system is able to predict abscise rates within 3% of the current method with a 7 times improvement in speed, while requiring significantly less manual effort. Moreover, we provide results on images captured by a robotic system in the field, and discuss the next steps to make the process fully autonomous.