 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Measurement-Driven Digital Twin Architecture for Plant-Level Biomass Estimation and Growth Forecasting in Hydroponic Systems
Jun 01, 2026Alternatives to soil-based horticulture, such as hydroponics, have been developed to respond to food distribution concerns for dense urban centers. A new system was developed to track an individual lettuce plant's growth in a hydroponic environment, utilizing streams of measured information and available models to continuously update the growth trajectory estimates for a plant. These "digital twin" models were integrated into an operating hydroponic greenhouse, with custom horticultural and sensor hardware to grow and measure relevant information. To aid in updating model parameters, plant yield was continuously measured with a custom neural network, using RGB-D images of the plants as an input. The network, trained on a collected dataset of 1300 images, was able to estimate mass within 1.5 g of the ground-truth value. After integration into the custom system, digital twin growth projections could approximate future yield between one and four days in the future, maintaining around a 2 g forecasting error.
Active Robotic Perception for Disease Detection and Mapping in Apple Trees
Mar 24, 2026Large-scale orchard production requires timely and precise disease monitoring, yet routine manual scouting is labor-intensive and financially impractical at the scale of modern operations. As a result, disease outbreaks are often detected late and tracked at coarse spatial resolutions, typically at the orchard-block level. We present an autonomous mobile active perception system for targeted disease detection and mapping in dormant apple trees, demonstrated on one of the most devastating diseases affecting apple today -- fire blight. The system integrates flash-illuminated stereo RGB sensing, real-time depth estimation, instance-level segmentation, and confidence-aware semantic 3D mapping to achieve precise localization of disease symptoms. Semantic predictions are fused into the volumetric occupancy map representation enabling the tracking of both occupancy and per-voxel semantic confidence, building actionable spatial maps for growers. To actively refine observations within complex canopies, we evaluate three viewpoint planning strategies within a unified perception-action loop: a deterministic geometric baseline, a volumetric next-best-view planner that maximizes unknown-space reduction, and a semantic next-best-view planner that prioritizes low-confidence symptomatic regions. Experiments on a fabricated lab tree and five simulated symptomatic trees demonstrate reliable symptom localization and mapping as a precursor to a field evaluation. In simulation, the semantic planner achieves the highest F1 score (0.6106) after 30 viewpoints, while the volumetric planner achieves the highest ROI coverage (85.82\%). In the lab setting, the semantic planner attains the highest final F1 (0.9058), with both next-best-view planners substantially improving coverage over the baseline.
MapForest: A Modular Field Robotics System for Forest Mapping and Invasive Species Localization
Mar 23, 2026Monitoring and controlling invasive tree species across large forests, parks, and trail networks is challenging due to limited accessibility, reliance on manual scouting, and degraded under-canopy GNSS. We present MapForest, a modular field robotics system that transforms multi-modal sensor data into GIS-ready invasive-species maps. Our system features: (i) a compact, platform-agnostic sensing payload that can be rapidly mounted on UAV, bicycle, or backpack platforms, and (ii) a software pipeline comprising LiDAR-inertial mapping, image-based invasive-species detection, and georeferenced map generation. To ensure reliable operation in GNSS-intermittent environments, we enhance a LiDAR-inertial mapping backbone with covariance-aware GNSS factors and robust loss kernels. We train an object detector to detect the Tree-of-Heaven (Ailanthus altissima) from onboard RGB imagery and fuse detections with the reconstructed map to produce geospatial outputs suitable for downstream decision making. We collected a dataset spanning six sites across urban environments, parks, trails, and forests to evaluate individual system modules, and report end-to-end results on two sites containing Tree-of-Heaven. The enhanced mapping module achieved a trajectory deviation error of 1.95 m over a 1.2 km forest traversal, and the Tree-of-Heaven detector achieved an F1 score of 0.653. The datasets and associated tooling are released to support reproducible research in forest mapping and invasive-species monitoring.
T-REX: Vision-Based System for Autonomous Leaf Detection and Grasp Estimation
May 03, 2025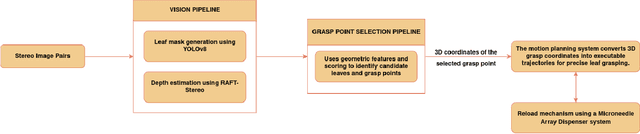
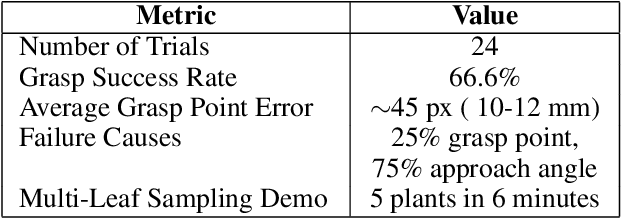
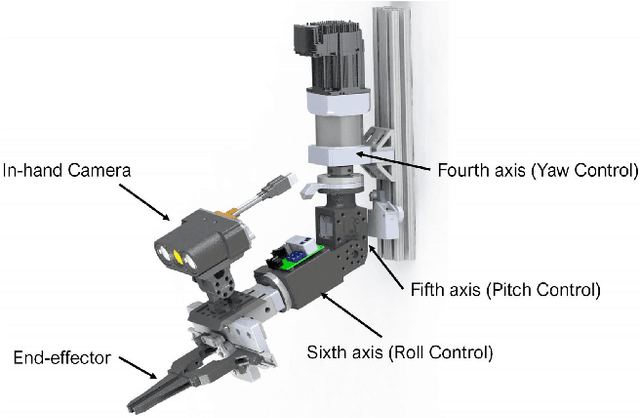
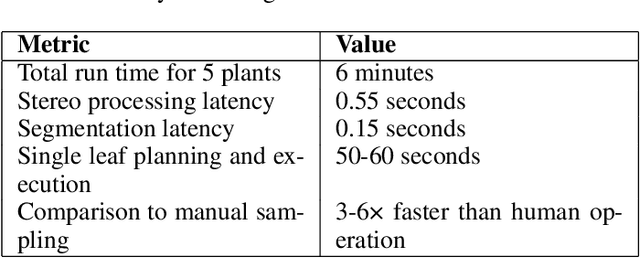
T-Rex (The Robot for Extracting Leaf Samples) is a gantry-based robotic system developed for autonomous leaf localization, selection, and grasping in greenhouse environments. The system integrates a 6-degree-of-freedom manipulator with a stereo vision pipeline to identify and interact with target leaves. YOLOv8 is used for real-time leaf segmentation, and RAFT-Stereo provides dense depth maps, allowing the reconstruction of 3D leaf masks. These observations are processed through a leaf grasping algorithm that selects the optimal leaf based on clutter, visibility, and distance, and determines a grasp point by analyzing local surface flatness, top-down approachability, and margin from edges. The selected grasp point guides a trajectory executed by ROS-based motion controllers, driving a custom microneedle-equipped end-effector to clamp the leaf and simulate tissue sampling. Experiments conducted with artificial plants under varied poses demonstrate that the T-Rex system can consistently detect, plan, and perform physical interactions with plant-like targets, achieving a grasp success rate of 66.6\%. This paper presents the system architecture, implementation, and testing of T-Rex as a step toward plant sampling automation in Controlled Environment Agriculture (CEA).
Autonomous Robotic Pepper Harvesting: Imitation Learning in Unstructured Agricultural Environments
Nov 15, 2024


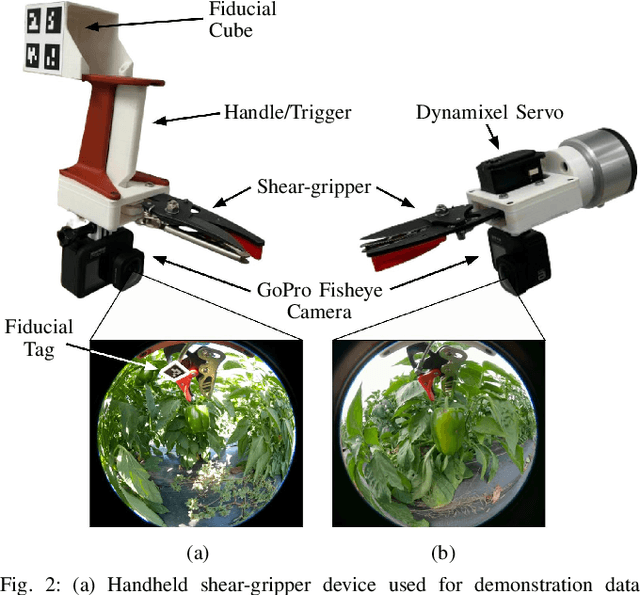
Automating tasks in outdoor agricultural fields poses significant challenges due to environmental variability, unstructured terrain, and diverse crop characteristics. We present a robotic system for autonomous pepper harvesting designed to operate in these unprotected, complex settings. Utilizing a custom handheld shear-gripper, we collected 300 demonstrations to train a visuomotor policy, enabling the system to adapt to varying field conditions and crop diversity. We achieved a success rate of 28.95% with a cycle time of 31.71 seconds, comparable to existing systems tested under more controlled conditions like greenhouses. Our system demonstrates the feasibility and effectiveness of leveraging imitation learning for automated harvesting in unstructured agricultural environments. This work aims to advance scalable, automated robotic solutions for agriculture in natural settings.
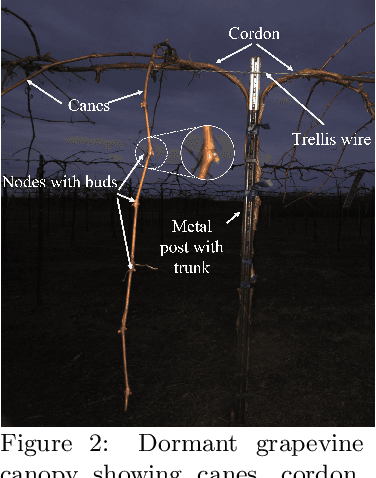
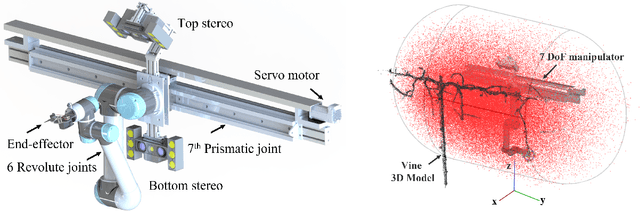
3D Skeletonization of Complex Grapevines for Robotic Pruning
Jul 21, 2023Robotic pruning of dormant grapevines is an area of active research in order to promote vine balance and grape quality, but so far robotic efforts have largely focused on planar, simplified vines not representative of commercial vineyards. This paper aims to advance the robotic perception capabilities necessary for pruning in denser and more complex vine structures by extending plant skeletonization techniques. The proposed pipeline generates skeletal grapevine models that have lower reprojection error and higher connectivity than baseline algorithms. We also show how 3D and skeletal information enables prediction accuracy of pruning weight for dense vines surpassing prior work, where pruning weight is an important vine metric influencing pruning site selection.
Autonomous Apple Fruitlet Sizing and Growth Rate Tracking using Computer Vision
Dec 03, 2022Measuring growth rates of apple fruitlets is important because it allows apple growers to determine when to apply chemical thinners to their crops to optimize yield. The current practice of obtaining growth rates involves using calipers to record sizes of fruitlets across multiple days. Due to the number of fruitlets needed to be sized, this method is laborious, time-consuming, and prone to human error. In this paper, we present a computer vision approach to measure the sizes and growth rates of apple fruitlets. With images collected by a hand-held stereo camera, our system detects, segments, and fits ellipses to fruitlets to measure their diameters. To measure growth rates, we utilize an Attentional Graph Neural Network to associate fruitlets across different days. We provide quantitative results on data collected in an apple orchard, and demonstrate that our system is able to predict abscise rates within 3% of the current method with a 7 times improvement in speed, while requiring significantly less manual effort. Moreover, we provide results on images captured by a robotic system in the field, and discuss the next steps to make the process fully autonomous.
Bumblebee: A Path Towards Fully Autonomous Robotic Vine Pruning
Dec 01, 2021
Dormant season grapevine pruning requires skilled seasonal workers during the winter season which are becoming less available. As workers hasten to prune more vines in less time amid to the short-term seasonal hiring culture and low wages, vines are often pruned inconsistently leading to imbalanced grapevines. In addition to this, currently existing mechanical methods cannot selectively prune grapevines and manual follow-up operations are often required that further increase production cost. In this paper, we present the design and field evaluation of a rugged, and fully autonomous robot for end-to-end pruning of dormant season grapevines. The proposed design incorporates novel camera systems, a kinematically redundant manipulator, a ground robot, and novel algorithms in the perception system. The presented research prototype robot system was able to spur prune a row of vines from both sides completely in 213 sec/vine with a total pruning accuracy of 87%. Initial field tests of the autonomous system in a commercial vineyard have shown significant variability reduction in dormant season pruning when compared to mechanical pre-pruning trials. The design approach, system components, lessons learned, future enhancements as well as a brief economic analysis are described in the manuscript.
Semantics-guided Skeletonization of Sweet Cherry Trees for Robotic Pruning
Mar 04, 2021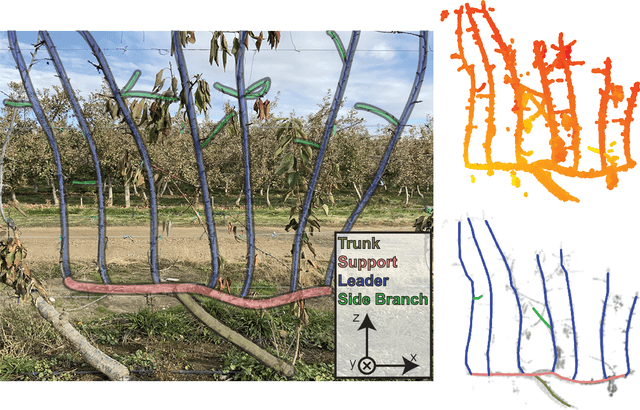
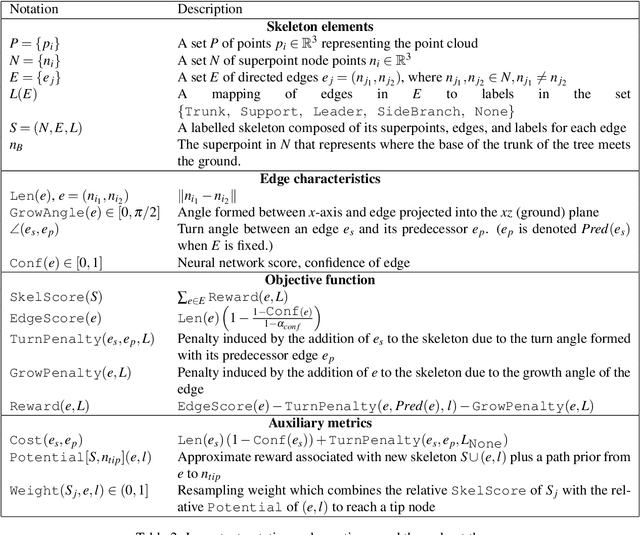
Dormant pruning for fresh market fruit trees is a relatively unexplored application of agricultural robotics for which few end-to-end systems exist. One of the biggest challenges in creating an autonomous pruning system is the need to reconstruct a model of a tree which is accurate and informative enough to be useful for deciding where to cut. One useful structure for modeling a tree is a skeleton: a 1D, lightweight representation of the geometry and the topology of a tree. This skeletonization problem is an important one within the field of computer graphics, and a number of algorithms have been specifically developed for the task of modeling trees. These skeletonization algorithms have largely addressed the problem as a geometric one. In agricultural contexts, however, the parts of the tree have distinct labels, such as the trunk, supporting branches, etc. This labeled structure is important for understanding where to prune. We introduce an algorithm which produces such a labeled skeleton, using the topological and geometric priors associated with these labels to improve our skeletons. We test our skeletonization algorithm on point clouds from 29 upright fruiting offshoot (UFO) trees and demonstrate a median accuracy of 70% with respect to a human-evaluated gold standard. We also make point cloud scans of 82 UFO trees open-source to other researchers. Our work represents a significant first step towards a robust tree modeling framework which can be used in an autonomous pruning system.
A Robust Illumination-Invariant Camera System for Agricultural Applications
Jan 06, 2021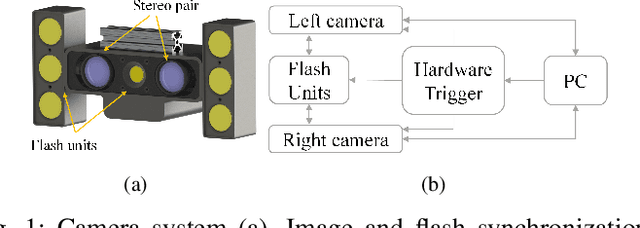
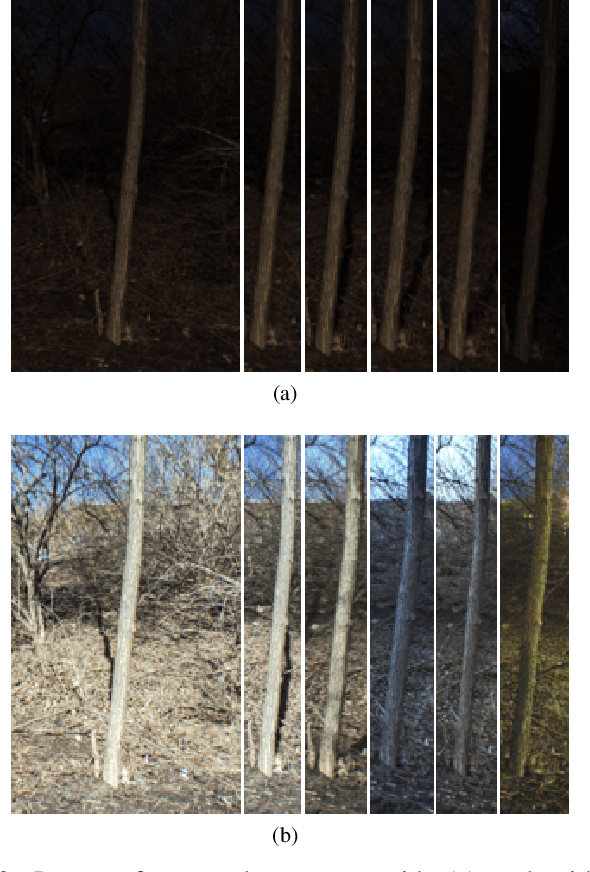
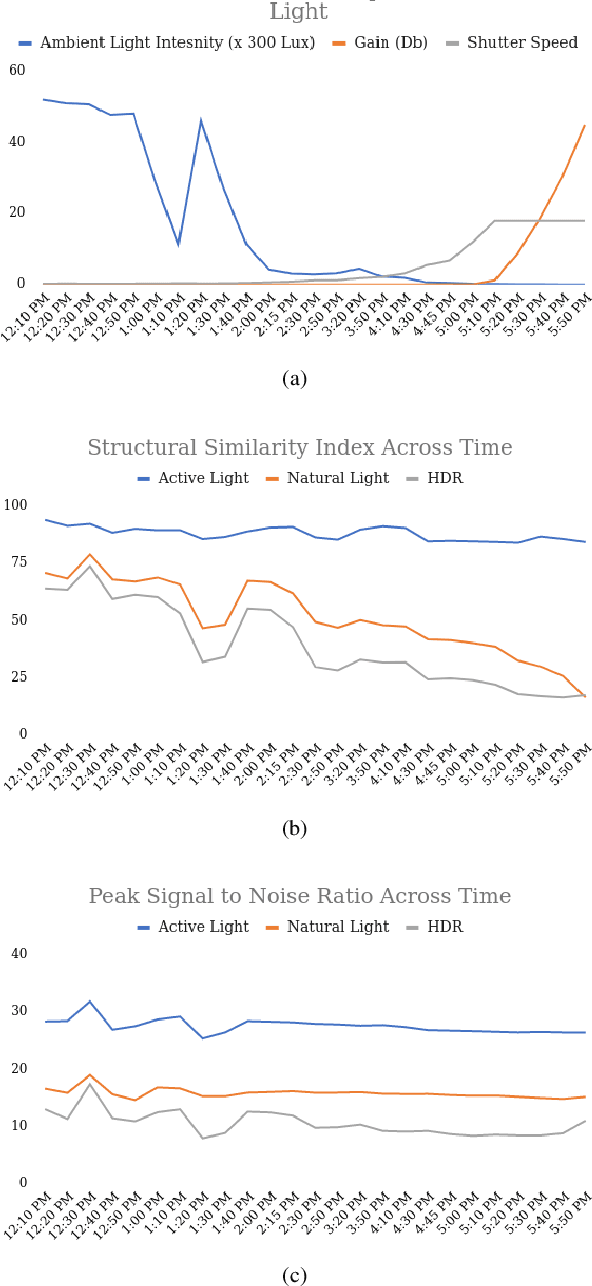
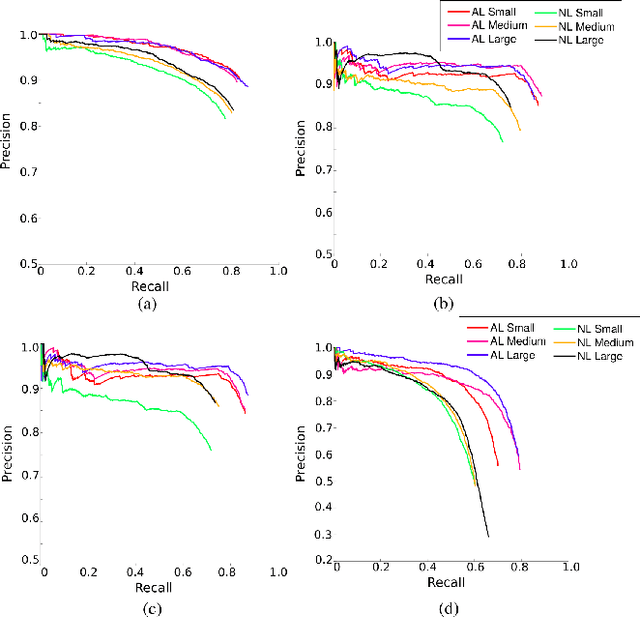
Object detection and semantic segmentation are two of the most widely adopted deep learning algorithms in agricultural applications. One of the major sources of variability in image quality acquired in the outdoors for such tasks is changing lighting condition that can alter the appearance of the objects or the contents of the entire image. While transfer learning and data augmentation to some extent reduce the need for large amount of data to train deep neural networks, the large variety of cultivars and the lack of shared datasets in agriculture makes wide-scale field deployments difficult. In this paper, we present a high throughput robust active lighting-based camera system that generates consistent images in all lighting conditions. We detail experiments that show the consistency in images quality leading to relatively fewer images to train deep neural networks for the task of object detection. We further present results from field experiment under extreme lighting conditions where images without active lighting significantly lack to provide consistent results. The experimental results show that on average, deep nets for object detection trained on consistent data required nearly four times less data to achieve similar level of accuracy. This proposed work could potentially provide pragmatic solutions to computer vision needs in agriculture.