 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA real-time, hardware agnostic framework for close-up branch reconstruction using RGB data
Sep 20, 2023



Creating accurate 3D models of tree topology is an important task for tree pruning. The 3D model is used to decide which branches to prune and then to execute the pruning cuts. Previous methods for creating 3D tree models have typically relied on point clouds, which are often computationally expensive to process and can suffer from data defects, especially with thin branches. In this paper, we propose a method for actively scanning along a primary tree branch, detecting secondary branches to be pruned, and reconstructing their 3D geometry using just an RGB camera mounted on a robot arm. We experimentally validate that our setup is able to produce primary branch models with 4-5 mm accuracy and secondary branch models with 15 degrees orientation accuracy with respect to the ground truth model. Our framework is real-time and can run up to 10 cm/s with no loss in model accuracy or ability to detect secondary branches.
An autonomous robot for pruning modern, planar fruit trees
Jun 14, 2022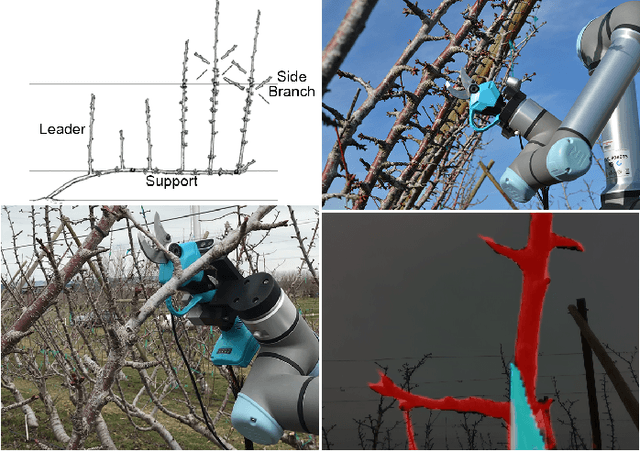
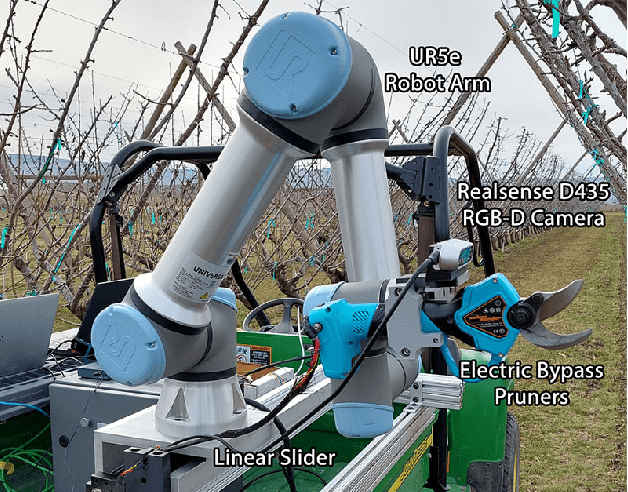


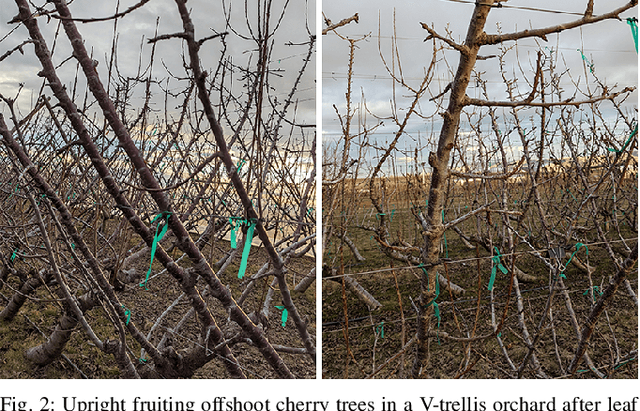
Dormant pruning of fruit trees is an important task for maintaining tree health and ensuring high-quality fruit. Due to decreasing labor availability, pruning is a prime candidate for robotic automation. However, pruning also represents a uniquely difficult problem for robots, requiring robust systems for perception, pruning point determination, and manipulation that must operate under variable lighting conditions and in complex, highly unstructured environments. In this paper, we introduce a system for pruning sweet cherry trees (in a planar tree architecture called an upright fruiting offshoot configuration) that integrates various subsystems from our previous work on perception and manipulation. The resulting system is capable of operating completely autonomously and requires minimal control of the environment. We validate the performance of our system through field trials in a sweet cherry orchard, ultimately achieving a cutting success rate of 58%. Though not fully robust and requiring improvements in throughput, our system is the first to operate on fruit trees and represents a useful base platform to be improved in the future.
Optical flow-based branch segmentation for complex orchard environments
Feb 26, 2022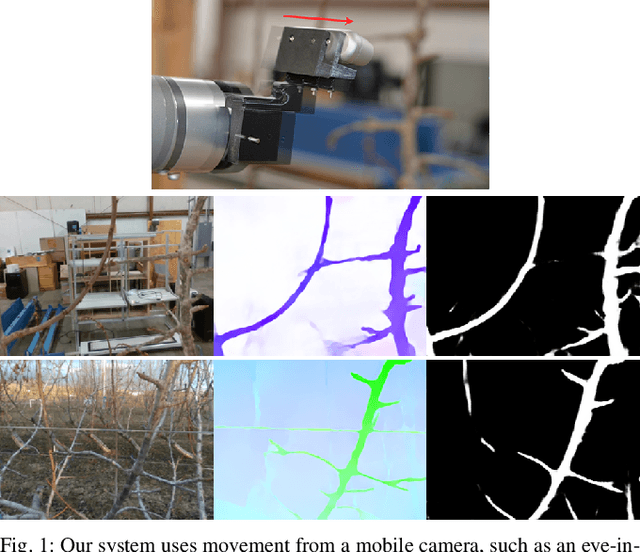
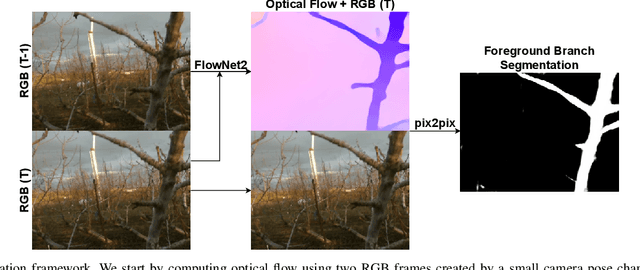
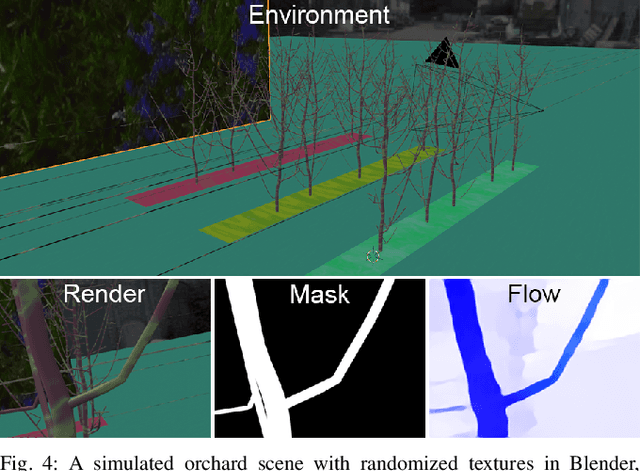
Machine vision is a critical subsystem for enabling robots to be able to perform a variety of tasks in orchard environments. However, orchards are highly visually complex environments, and computer vision algorithms operating in them must be able to contend with variable lighting conditions and background noise. Past work on enabling deep learning algorithms to operate in these environments has typically required large amounts of hand-labeled data to train a deep neural network or physically controlling the conditions under which the environment is perceived. In this paper, we train a neural network system in simulation only using simulated RGB data and optical flow. This resulting neural network is able to perform foreground segmentation of branches in a busy orchard environment without additional real-world training or using any special setup or equipment beyond a standard camera. Our results show that our system is highly accurate and, when compared to a network using manually labeled RGBD data, achieves significantly more consistent and robust performance across environments that differ from the training set.
Precision fruit tree pruning using a learned hybrid vision/interaction controller
Sep 27, 2021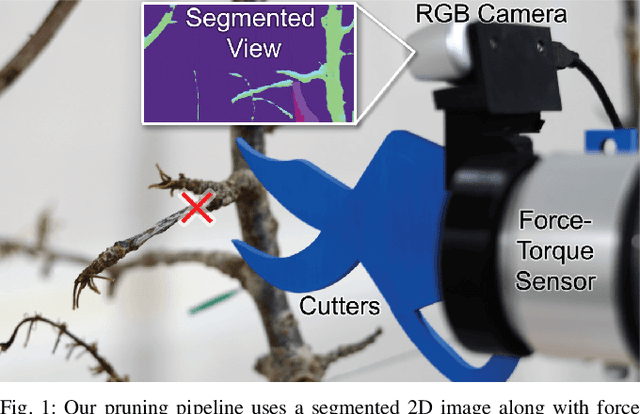

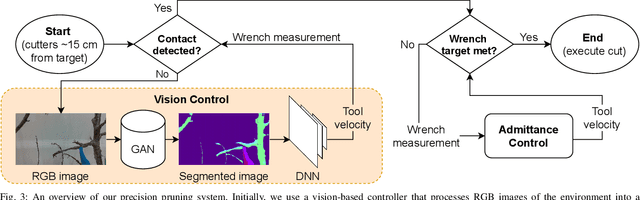
Robotic tree pruning requires highly precise manipulator control in order to accurately align a cutting implement with the desired pruning point at the correct angle. Simultaneously, the robot must avoid applying excessive force to rigid parts of the environment such as trees, support posts, and wires. In this paper, we propose a hybrid control system that uses a learned vision-based controller to initially align the cutter with the desired pruning point, taking in images of the environment and outputting control actions. This controller is trained entirely in simulation, but transfers easily to real trees via a neural network which transforms raw images into a simplified, segmented representation. Once contact is established, the system hands over control to an interaction controller that guides the cutter pivot point to the branch while minimizing interaction forces. With this simple, yet novel, approach we demonstrate an improvement of over 30 percentage points in accuracy over a baseline controller that uses camera depth data.
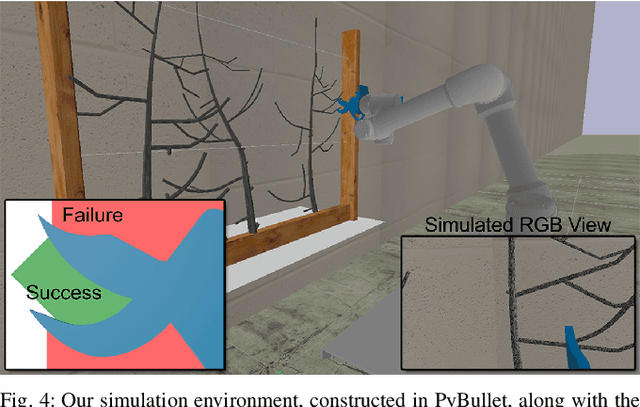
Semantics-guided Skeletonization of Sweet Cherry Trees for Robotic Pruning
Mar 04, 2021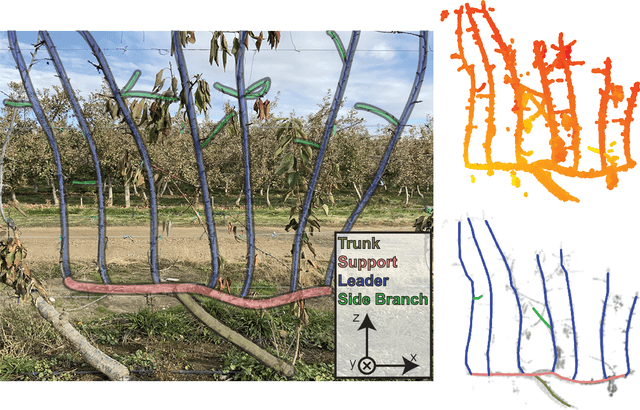
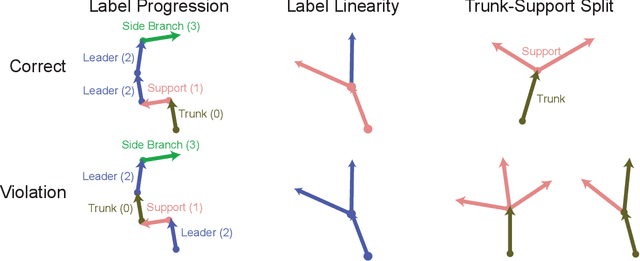
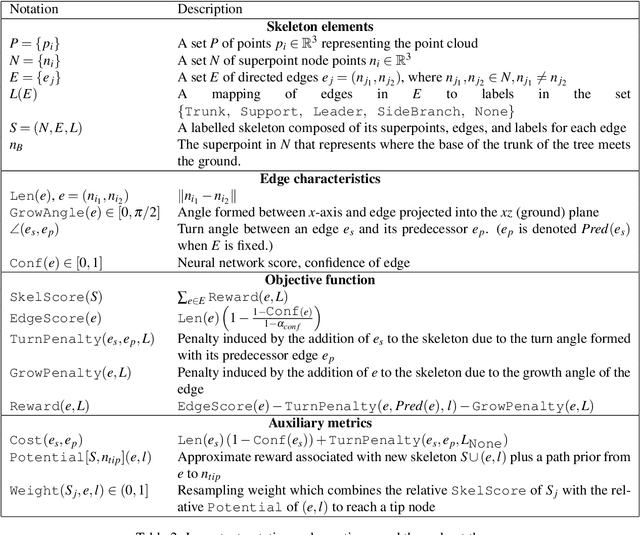
Dormant pruning for fresh market fruit trees is a relatively unexplored application of agricultural robotics for which few end-to-end systems exist. One of the biggest challenges in creating an autonomous pruning system is the need to reconstruct a model of a tree which is accurate and informative enough to be useful for deciding where to cut. One useful structure for modeling a tree is a skeleton: a 1D, lightweight representation of the geometry and the topology of a tree. This skeletonization problem is an important one within the field of computer graphics, and a number of algorithms have been specifically developed for the task of modeling trees. These skeletonization algorithms have largely addressed the problem as a geometric one. In agricultural contexts, however, the parts of the tree have distinct labels, such as the trunk, supporting branches, etc. This labeled structure is important for understanding where to prune. We introduce an algorithm which produces such a labeled skeleton, using the topological and geometric priors associated with these labels to improve our skeletons. We test our skeletonization algorithm on point clouds from 29 upright fruiting offshoot (UFO) trees and demonstrate a median accuracy of 70% with respect to a human-evaluated gold standard. We also make point cloud scans of 82 UFO trees open-source to other researchers. Our work represents a significant first step towards a robust tree modeling framework which can be used in an autonomous pruning system.