 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForecasting Vehicle Pitch of a Lightweight Underwater Vehicle Manipulator System with Recurrent Neural Networks
Sep 27, 2022

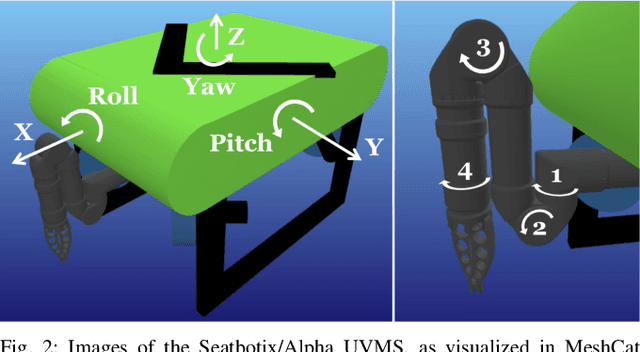
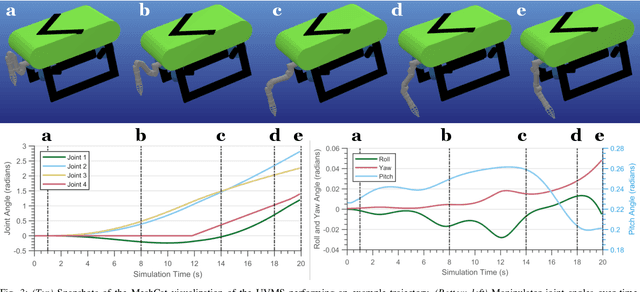
As Underwater Vehicle Manipulator Systems (UVMSs) have gotten smaller and lighter over the past years, it is becoming increasingly important to consider the coupling forces between the manipulator and the vehicle when planning and controlling the system. However, typical methods of handling these forces require an exact hydrodynamic model of the vehicle and access to low-level torque control on the manipulator, both of which are uncommon in the field. Therefore, many UVMS control methods are kinematics-based, which cannot inherently account for these effects. Our work bridges the gap between kinematic control and dynamics by training a recurrent neural network on simulated UVMS data to predict the pitch of the vehicle in the future based on the system's previous states. Kinematic planners and controllers can use this metric to incorporate dynamic knowledge without a computationally expensive model, improving their ability to perform underwater manipulation tasks.
Precision fruit tree pruning using a learned hybrid vision/interaction controller
Sep 27, 2021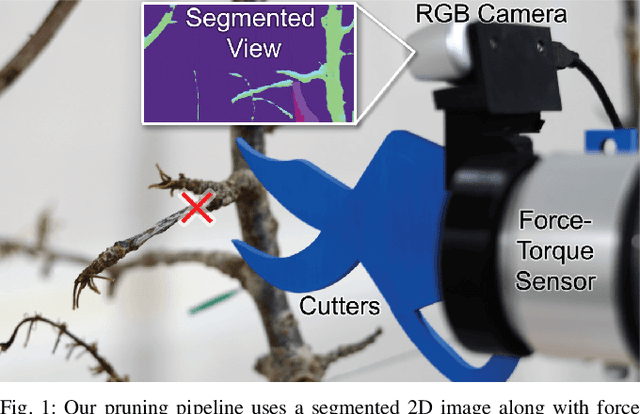

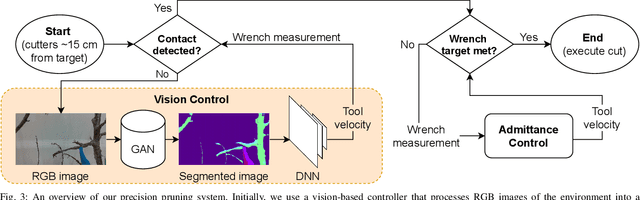
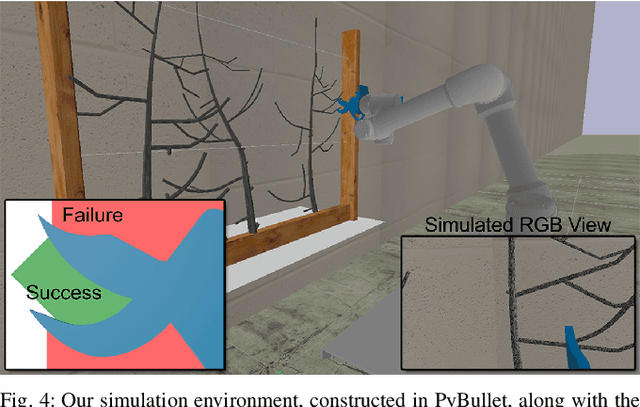
Robotic tree pruning requires highly precise manipulator control in order to accurately align a cutting implement with the desired pruning point at the correct angle. Simultaneously, the robot must avoid applying excessive force to rigid parts of the environment such as trees, support posts, and wires. In this paper, we propose a hybrid control system that uses a learned vision-based controller to initially align the cutter with the desired pruning point, taking in images of the environment and outputting control actions. This controller is trained entirely in simulation, but transfers easily to real trees via a neural network which transforms raw images into a simplified, segmented representation. Once contact is established, the system hands over control to an interaction controller that guides the cutter pivot point to the branch while minimizing interaction forces. With this simple, yet novel, approach we demonstrate an improvement of over 30 percentage points in accuracy over a baseline controller that uses camera depth data.