 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForecasting Vehicle Pitch of a Lightweight Underwater Vehicle Manipulator System with Recurrent Neural Networks
Paper and Code
Sep 27, 2022

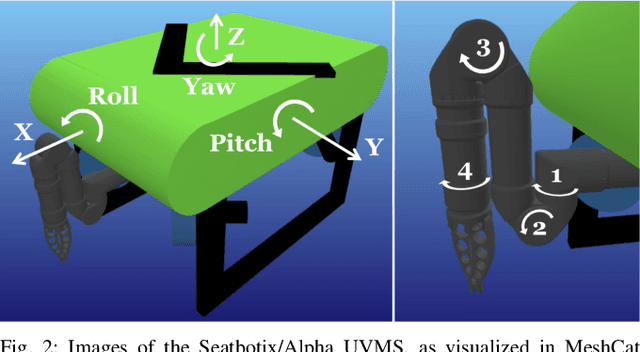
As Underwater Vehicle Manipulator Systems (UVMSs) have gotten smaller and lighter over the past years, it is becoming increasingly important to consider the coupling forces between the manipulator and the vehicle when planning and controlling the system. However, typical methods of handling these forces require an exact hydrodynamic model of the vehicle and access to low-level torque control on the manipulator, both of which are uncommon in the field. Therefore, many UVMS control methods are kinematics-based, which cannot inherently account for these effects. Our work bridges the gap between kinematic control and dynamics by training a recurrent neural network on simulated UVMS data to predict the pitch of the vehicle in the future based on the system's previous states. Kinematic planners and controllers can use this metric to incorporate dynamic knowledge without a computationally expensive model, improving their ability to perform underwater manipulation tasks.