 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA real-time, hardware agnostic framework for close-up branch reconstruction using RGB data
Sep 20, 2023



Creating accurate 3D models of tree topology is an important task for tree pruning. The 3D model is used to decide which branches to prune and then to execute the pruning cuts. Previous methods for creating 3D tree models have typically relied on point clouds, which are often computationally expensive to process and can suffer from data defects, especially with thin branches. In this paper, we propose a method for actively scanning along a primary tree branch, detecting secondary branches to be pruned, and reconstructing their 3D geometry using just an RGB camera mounted on a robot arm. We experimentally validate that our setup is able to produce primary branch models with 4-5 mm accuracy and secondary branch models with 15 degrees orientation accuracy with respect to the ground truth model. Our framework is real-time and can run up to 10 cm/s with no loss in model accuracy or ability to detect secondary branches.
TrimBot2020: an outdoor robot for automatic gardening
May 15, 2018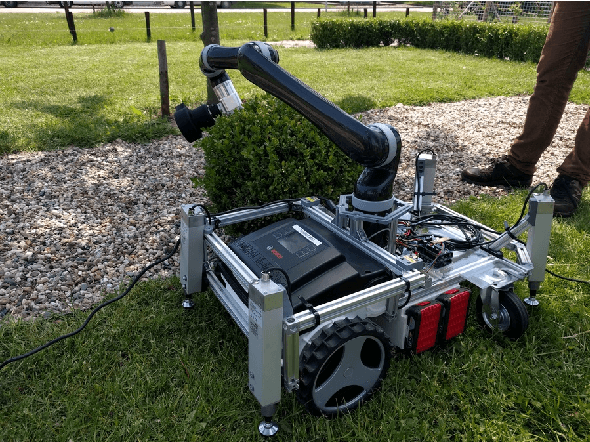
Robots are increasingly present in modern industry and also in everyday life. Their applications range from health-related situations, for assistance to elderly people or in surgical operations, to automatic and driver-less vehicles (on wheels or flying) or for driving assistance. Recently, an interest towards robotics applied in agriculture and gardening has arisen, with applications to automatic seeding and cropping or to plant disease control, etc. Autonomous lawn mowers are succesful market applications of gardening robotics. In this paper, we present a novel robot that is developed within the TrimBot2020 project, funded by the EU H2020 program. The project aims at prototyping the first outdoor robot for automatic bush trimming and rose pruning.
Improved Part Segmentation Performance by Optimising Realism of Synthetic Images using Cycle Generative Adversarial Networks
Mar 16, 2018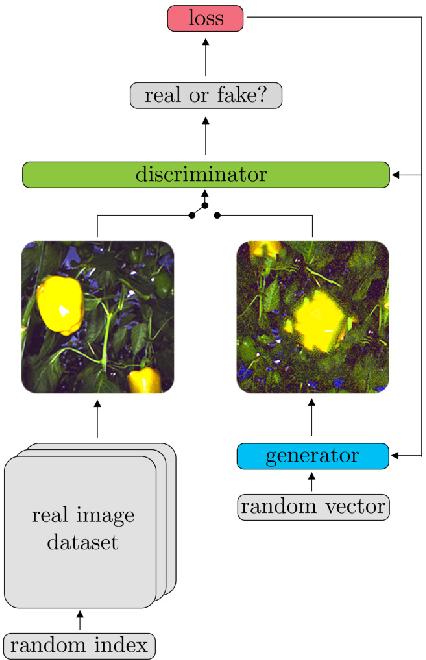

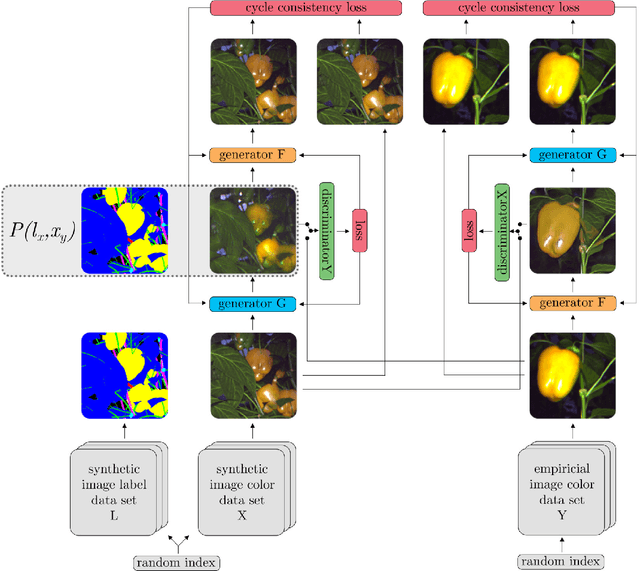
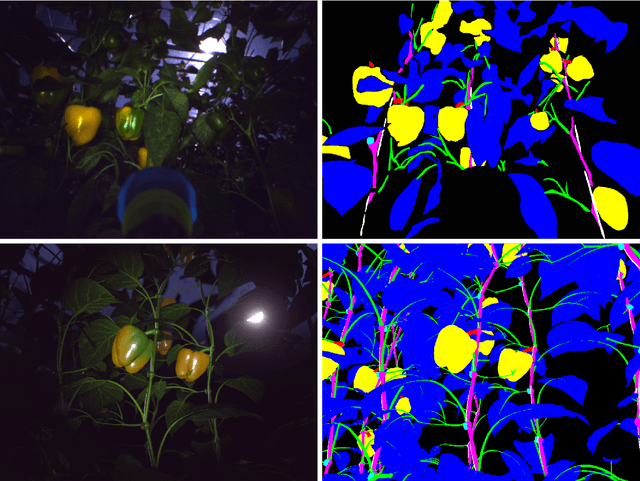
In this paper we report on improved part segmentation performance using convolutional neural networks to reduce the dependency on the large amount of manually annotated empirical images. This was achieved by optimising the visual realism of synthetic agricultural images.In Part I, a cycle consistent generative adversarial network was applied to synthetic and empirical images with the objective to generate more realistic synthetic images by translating them to the empirical domain. We first hypothesise and confirm that plant part image features such as color and texture become more similar to the empirical domain after translation of the synthetic images.Results confirm this with an improved mean color distribution correlation with the empirical data prior of 0.62 and post translation of 0.90. Furthermore, the mean image features of contrast, homogeneity, energy and entropy moved closer to the empirical mean, post translation. In Part II, 7 experiments were performed using convolutional neural networks with different combinations of synthetic, synthetic translated to empirical and empirical images. We hypothesised that the translated images can be used for (i) improved learning of empirical images, and (ii) that learning without any fine-tuning with empirical images is improved by bootstrapping with translated images over bootstrapping with synthetic images. Results confirm our second and third hypotheses. First a maximum intersection-over-union performance was achieved of 0.52 when bootstrapping with translated images and fine-tuning with empirical images; an 8% increase compared to only using synthetic images. Second, training without any empirical fine-tuning resulted in an average IOU of 0.31; a 55% performance increase over previous methods that only used synthetic images.