 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-driven worker activity recognition and picking efficiency estimation in manual strawberry harvesting
Mar 28, 2025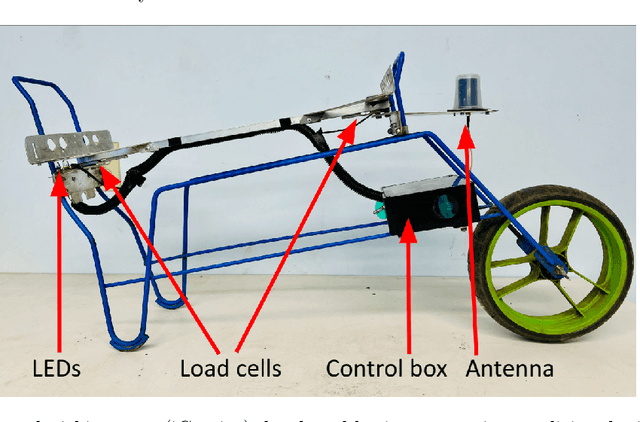
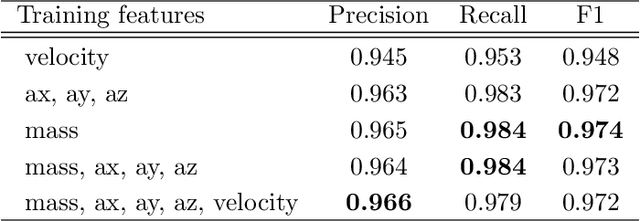

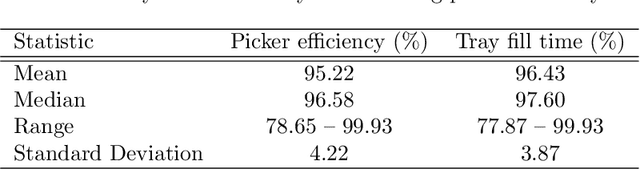
Manual fruit harvesting is common in agriculture, but the amount of time that pickers spend on nonproductive activities can make it very inefficient. Accurately identifying picking vs. non-picking activity is crucial for estimating picker efficiency and optimizing labor management and the harvest process. In this study, a practical system was developed to calculate the efficiency of pickers in commercial strawberry harvesting. Instrumented picking carts were used to record in real-time the harvested fruit weight, geo-location, and cart movement. A fleet of these carts was deployed during the commercial strawberry harvest season in Santa Maria, CA. The collected data was then used to train a CNN-LSTM-based deep neural network to classify a picker's activity into ``Pick" and ``NoPick" classes. Experimental evaluations showed that the CNN-LSTM model showed promising activity recognition performance with an F1 score accuracy of up to 0.974. The classification results were then used to compute two worker efficiency metrics: the percentage of time spent actively picking, and the time required to fill a tray. Analysis of the season-long harvest data showed that the pickers spent an average of 73.56% of their total harvest time actively picking strawberries, with an average tray fill time of 6.22 minutes. The mean accuracies of these metrics were 96.29% and 95.42%, respectively. When integrated on a commercial scale, the proposed technology could aid growers in automated worker activity monitoring and harvest optimization, ultimately helping to reduce non-productive time and enhance overall harvest efficiency.
A Robotic System for Precision Pollination in Apples: Design, Development and Field Evaluation
Sep 30, 2024



Global food production depends upon successful pollination, a process that relies on natural and managed pollinators. However, natural pollinators are declining due to different factors, including climate change, habitat loss, and pesticide use. Thus, developing alternative pollination methods is essential for sustainable crop production. This paper introduces a robotic system for precision pollination in apples, which are not self-pollinating and require precise delivery of pollen to the stigmatic surfaces of the flowers. The proposed robotic system consists of a machine vision system to identify target flowers and a mechatronic system with a 6-DOF UR5e robotic manipulator and an electrostatic sprayer. Field trials of this system in 'Honeycrisp' and 'Fuji' apple orchards have shown promising results, with the ability to pollinate flower clusters at an average spray cycle time of 6.5 seconds. The robotic pollination system has achieved encouraging fruit set and quality, comparable to naturally pollinated fruits in terms of color, weight, diameter, firmness, soluble solids, and starch content. However, the results for fruit set and quality varied between different apple cultivars and pollen concentrations. This study demonstrates the potential for a robotic artificial pollination system to be an efficient and sustainable method for commercial apple production. Further research is needed to refine the system and assess its suitability across diverse orchard environments and apple cultivars.
AgRegNet: A Deep Regression Network for Flower and Fruit Density Estimation, Localization, and Counting in Orchards
Sep 25, 2024



One of the major challenges for the agricultural industry today is the uncertainty in manual labor availability and the associated cost. Automated flower and fruit density estimation, localization, and counting could help streamline harvesting, yield estimation, and crop-load management strategies such as flower and fruitlet thinning. This article proposes a deep regression-based network, AgRegNet, to estimate density, count, and location of flower and fruit in tree fruit canopies without explicit object detection or polygon annotation. Inspired by popular U-Net architecture, AgRegNet is a U-shaped network with an encoder-to-decoder skip connection and modified ConvNeXt-T as an encoder feature extractor. AgRegNet can be trained based on information from point annotation and leverages segmentation information and attention modules (spatial and channel) to highlight relevant flower and fruit features while suppressing non-relevant background features. Experimental evaluation in apple flower and fruit canopy images under an unstructured orchard environment showed that AgRegNet achieved promising accuracy as measured by Structural Similarity Index (SSIM), percentage Mean Absolute Error (pMAE) and mean Average Precision (mAP) to estimate flower and fruit density, count, and centroid location, respectively. Specifically, the SSIM, pMAE, and mAP values for flower images were 0.938, 13.7%, and 0.81, respectively. For fruit images, the corresponding values were 0.910, 5.6%, and 0.93. Since the proposed approach relies on information from point annotation, it is suitable for sparsely and densely located objects. This simplified technique will be highly applicable for growers to accurately estimate yields and decide on optimal chemical and mechanical flower thinning practices.
Robotic Pollination of Apples in Commercial Orchards
Nov 21, 2023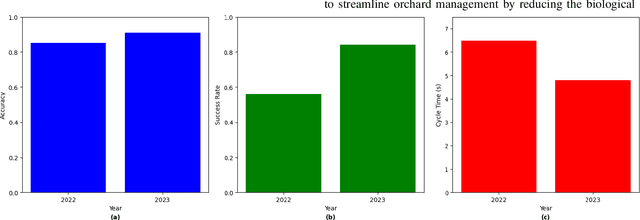
This research presents a novel, robotic pollination system designed for targeted pollination of apple flowers in modern fruiting wall orchards. Developed in response to the challenges of global colony collapse disorder, climate change, and the need for sustainable alternatives to traditional pollinators, the system utilizes a commercial manipulator, a vision system, and a spray nozzle for pollen application. Initial tests in April 2022 pollinated 56% of the target flower clusters with at least one fruit with a cycle time of 6.5 s. Significant improvements were made in 2023, with the system accurately detecting 91% of available flowers and pollinating 84% of target flowers with a reduced cycle time of 4.8 s. This system showed potential for precision artificial pollination that can also minimize the need for labor-intensive field operations such as flower and fruitlet thinning.
Machine Vision System for Early-stage Apple Flowers and Flower Clusters Detection for Precision Thinning and Pollination
Apr 19, 2023Early-stage identification of fruit flowers that are in both opened and unopened condition in an orchard environment is significant information to perform crop load management operations such as flower thinning and pollination using automated and robotic platforms. These operations are important in tree-fruit agriculture to enhance fruit quality, manage crop load, and enhance the overall profit. The recent development in agricultural automation suggests that this can be done using robotics which includes machine vision technology. In this article, we proposed a vision system that detects early-stage flowers in an unstructured orchard environment using YOLOv5 object detection algorithm. For the robotics implementation, the position of a cluster of the flower blossom is important to navigate the robot and the end effector. The centroid of individual flowers (both open and unopen) was identified and associated with flower clusters via K-means clustering. The accuracy of the opened and unopened flower detection is achieved up to mAP of 81.9% in commercial orchard images.
Design, Integration, and Field Evaluation of a Robotic Blossom Thinning System for Tree Fruit Crops
Apr 11, 2023The US apple industry relies heavily on semi-skilled manual labor force for essential field operations such as training, pruning, blossom and green fruit thinning, and harvesting. Blossom thinning is one of the crucial crop load management practices to achieve desired crop load, fruit quality, and return bloom. While several techniques such as chemical, and mechanical thinning are available for large-scale blossom thinning such approaches often yield unpredictable thinning results and may cause damage the canopy, spurs, and leaf tissue. Hence, growers still depend on laborious, labor intensive and expensive manual hand blossom thinning for desired thinning outcomes. This research presents a robotic solution for blossom thinning in apple orchards using a computer vision system with artificial intelligence, a six degrees of freedom robotic manipulator, and an electrically actuated miniature end-effector for robotic blossom thinning. The integrated robotic system was evaluated in a commercial apple orchard which showed promising results for targeted and selective blossom thinning. Two thinning approaches, center and boundary thinning, were investigated to evaluate the system ability to remove varying proportion of flowers from apple flower clusters. During boundary thinning the end effector was actuated around the cluster boundary while center thinning involved end-effector actuation only at the cluster centroid for a fixed duration of 2 seconds. The boundary thinning approach thinned 67.2% of flowers from the targeted clusters with a cycle time of 9.0 seconds per cluster, whereas center thinning approach thinned 59.4% of flowers with a cycle time of 7.2 seconds per cluster. When commercially adopted, the proposed system could help address problems faced by apple growers with current hand, chemical, and mechanical blossom thinning approaches.
An autonomous robot for pruning modern, planar fruit trees
Jun 14, 2022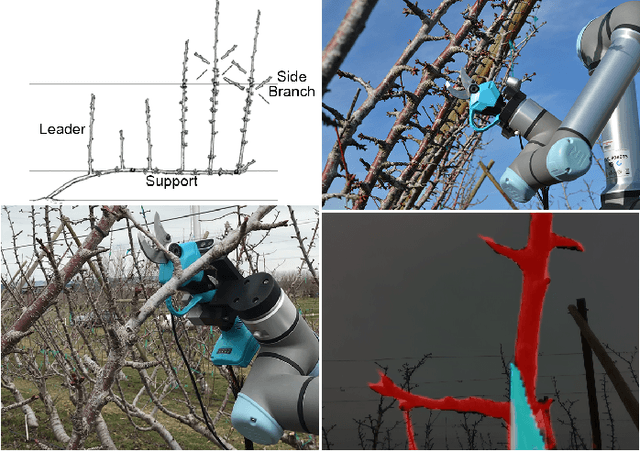
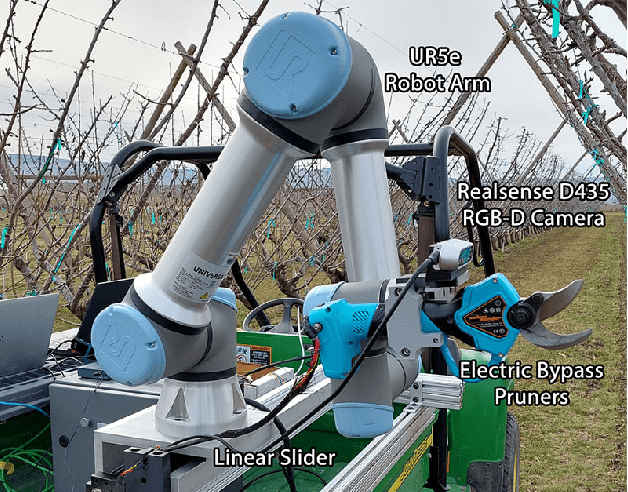


Dormant pruning of fruit trees is an important task for maintaining tree health and ensuring high-quality fruit. Due to decreasing labor availability, pruning is a prime candidate for robotic automation. However, pruning also represents a uniquely difficult problem for robots, requiring robust systems for perception, pruning point determination, and manipulation that must operate under variable lighting conditions and in complex, highly unstructured environments. In this paper, we introduce a system for pruning sweet cherry trees (in a planar tree architecture called an upright fruiting offshoot configuration) that integrates various subsystems from our previous work on perception and manipulation. The resulting system is capable of operating completely autonomously and requires minimal control of the environment. We validate the performance of our system through field trials in a sweet cherry orchard, ultimately achieving a cutting success rate of 58%. Though not fully robust and requiring improvements in throughput, our system is the first to operate on fruit trees and represents a useful base platform to be improved in the future.