 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-driven worker activity recognition and picking efficiency estimation in manual strawberry harvesting
Mar 28, 2025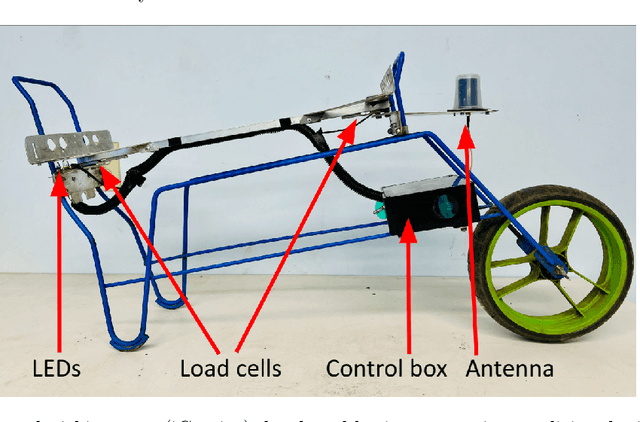
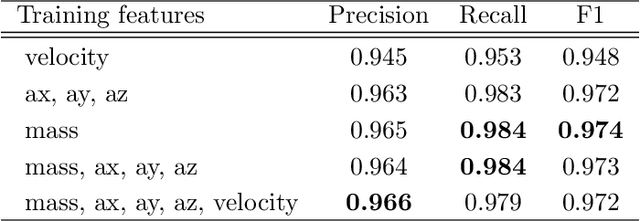

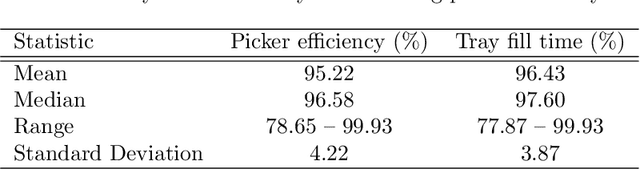
Manual fruit harvesting is common in agriculture, but the amount of time that pickers spend on nonproductive activities can make it very inefficient. Accurately identifying picking vs. non-picking activity is crucial for estimating picker efficiency and optimizing labor management and the harvest process. In this study, a practical system was developed to calculate the efficiency of pickers in commercial strawberry harvesting. Instrumented picking carts were used to record in real-time the harvested fruit weight, geo-location, and cart movement. A fleet of these carts was deployed during the commercial strawberry harvest season in Santa Maria, CA. The collected data was then used to train a CNN-LSTM-based deep neural network to classify a picker's activity into ``Pick" and ``NoPick" classes. Experimental evaluations showed that the CNN-LSTM model showed promising activity recognition performance with an F1 score accuracy of up to 0.974. The classification results were then used to compute two worker efficiency metrics: the percentage of time spent actively picking, and the time required to fill a tray. Analysis of the season-long harvest data showed that the pickers spent an average of 73.56% of their total harvest time actively picking strawberries, with an average tray fill time of 6.22 minutes. The mean accuracies of these metrics were 96.29% and 95.42%, respectively. When integrated on a commercial scale, the proposed technology could aid growers in automated worker activity monitoring and harvest optimization, ultimately helping to reduce non-productive time and enhance overall harvest efficiency.
Fusion-Driven Tree Reconstruction and Fruit Localization: Advancing Precision in Agriculture
Oct 23, 2023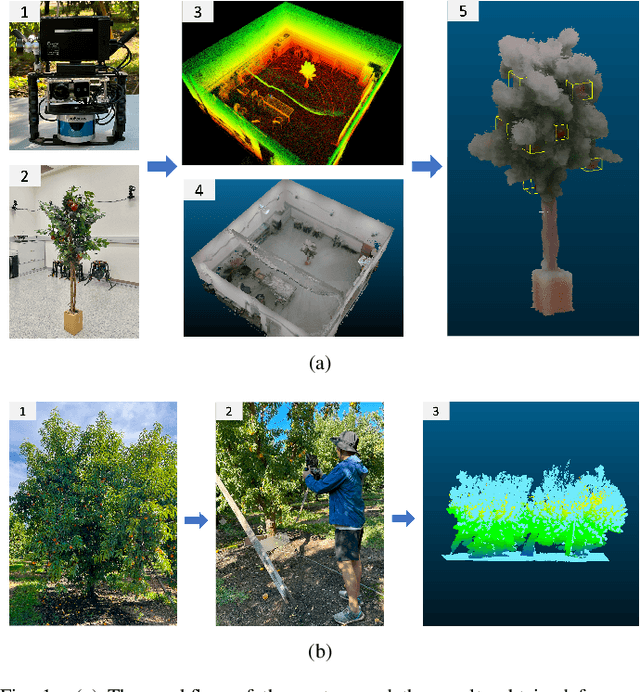
Fruit distribution is pivotal in shaping the future of both agriculture and agricultural robotics, paving the way for a streamlined supply chain. This study introduces an innovative methodology that harnesses the synergy of RGB imagery, LiDAR, and IMU data, to achieve intricate tree reconstructions and the pinpoint localization of fruits. Such integration not only offers insights into the fruit distribution, which enhances the precision of guidance for agricultural robotics and automation systems, but also sets the stage for simulating synthetic fruit patterns across varied tree architectures. To validate this approach, experiments have been carried out in both a controlled environment and an actual peach orchard. The results underscore the robustness and efficacy of this fusion-driven methodology, highlighting its potential as a transformative tool for future agricultural robotics and precision farming.
Optimization-Based Motion Planning for Autonomous Agricultural Vehicles Turning in Constrained Headlands
Aug 02, 2023



Headland maneuvering is a crucial aspect of unmanned field operations for autonomous agricultural vehicles (AAVs). While motion planning for headland turning in open fields has been extensively studied and integrated into commercial auto-guidance systems, the existing methods primarily address scenarios with ample headland space and thus may not work in more constrained headland geometries. Commercial orchards often contain narrow and irregularly shaped headlands, which may include static obstacles,rendering the task of planning a smooth and collision-free turning trajectory difficult. To address this challenge, we propose an optimization-based motion planning algorithm for headland turning under geometrical constraints imposed by field geometry and obstacles.