 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFusion-Driven Tree Reconstruction and Fruit Localization: Advancing Precision in Agriculture
Paper and Code
Oct 23, 2023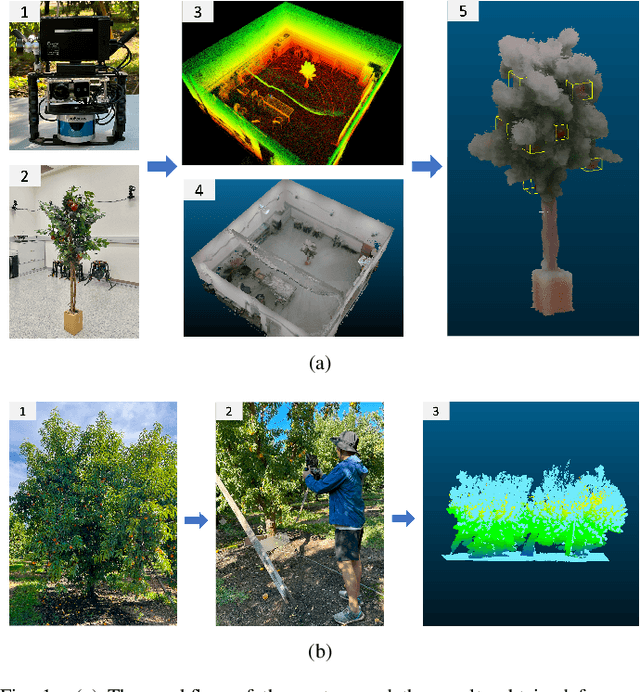
Fruit distribution is pivotal in shaping the future of both agriculture and agricultural robotics, paving the way for a streamlined supply chain. This study introduces an innovative methodology that harnesses the synergy of RGB imagery, LiDAR, and IMU data, to achieve intricate tree reconstructions and the pinpoint localization of fruits. Such integration not only offers insights into the fruit distribution, which enhances the precision of guidance for agricultural robotics and automation systems, but also sets the stage for simulating synthetic fruit patterns across varied tree architectures. To validate this approach, experiments have been carried out in both a controlled environment and an actual peach orchard. The results underscore the robustness and efficacy of this fusion-driven methodology, highlighting its potential as a transformative tool for future agricultural robotics and precision farming.