 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAGILE: A Diffusion-Based Attention-Guided Image and Label Translation for Efficient Cross-Domain Plant Trait Identification
Mar 27, 2025Semantically consistent cross-domain image translation facilitates the generation of training data by transferring labels across different domains, making it particularly useful for plant trait identification in agriculture. However, existing generative models struggle to maintain object-level accuracy when translating images between domains, especially when domain gaps are significant. In this work, we introduce AGILE (Attention-Guided Image and Label Translation for Efficient Cross-Domain Plant Trait Identification), a diffusion-based framework that leverages optimized text embeddings and attention guidance to semantically constrain image translation. AGILE utilizes pretrained diffusion models and publicly available agricultural datasets to improve the fidelity of translated images while preserving critical object semantics. Our approach optimizes text embeddings to strengthen the correspondence between source and target images and guides attention maps during the denoising process to control object placement. We evaluate AGILE on cross-domain plant datasets and demonstrate its effectiveness in generating semantically accurate translated images. Quantitative experiments show that AGILE enhances object detection performance in the target domain while maintaining realism and consistency. Compared to prior image translation methods, AGILE achieves superior semantic alignment, particularly in challenging cases where objects vary significantly or domain gaps are substantial.
VisTA-SR: Improving the Accuracy and Resolution of Low-Cost Thermal Imaging Cameras for Agriculture
May 29, 2024Thermal cameras are an important tool for agricultural research because they allow for non-invasive measurement of plant temperature, which relates to important photochemical, hydraulic, and agronomic traits. Utilizing low-cost thermal cameras can lower the barrier to introducing thermal imaging in agricultural research and production. This paper presents an approach to improve the temperature accuracy and image quality of low-cost thermal imaging cameras for agricultural applications. Leveraging advancements in computer vision techniques, particularly deep learning networks, we propose a method, called $\textbf{VisTA-SR}$ ($\textbf{Vis}$ual \& $\textbf{T}$hermal $\textbf{A}$lignment and $\textbf{S}$uper-$\textbf{R}$esolution Enhancement) that combines RGB and thermal images to enhance the capabilities of low-resolution thermal cameras. The research includes calibration and validation of temperature measurements, acquisition of paired image datasets, and the development of a deep learning network tailored for agricultural thermal imaging. Our study addresses the challenges of image enhancement in the agricultural domain and explores the potential of low-cost thermal cameras to replace high-resolution industrial cameras. Experimental results demonstrate the effectiveness of our approach in enhancing temperature accuracy and image sharpness, paving the way for more accessible and efficient thermal imaging solutions in agriculture.
A text-based, generative deep learning model for soil reflectance spectrum simulation in the VIS-NIR bands
May 02, 2024Simulating soil reflectance spectra is invaluable for soil-plant radiative modeling and training machine learning models, yet it is difficult as the intricate relationships between soil structure and its constituents. To address this, a fully data-driven soil optics generative model (SOGM) for simulation of soil reflectance spectra based on soil property inputs was developed. The model is trained on an extensive dataset comprising nearly 180,000 soil spectra-property pairs from 17 datasets. It generates soil reflectance spectra from text-based inputs describing soil properties and their values rather than only numerical values and labels in binary vector format. The generative model can simulate output spectra based on an incomplete set of input properties. SOGM is based on the denoising diffusion probabilistic model (DDPM). Two additional sub-models were also built to complement the SOGM: a spectral padding model that can fill in the gaps for spectra shorter than the full visible-near-infrared range (VIS-NIR; 400 to 2499 nm), and a wet soil spectra model that can estimate the effects of water content on soil reflectance spectra given the dry spectrum predicted by the SOGM. The SOGM was up-scaled by coupling with the Helios 3D plant modeling software, which allowed for generation of synthetic aerial images of simulated soil and plant scenes. It can also be easily integrated with soil-plant radiation model used for remote sensin research like PROSAIL. The testing results of the SOGM on new datasets that not included in model training proved that the model can generate reasonable soil reflectance spectra based on available property inputs. The presented models are openly accessible on: https://github.com/GEMINI-Breeding/SOGM_soil_spectra_simulation.
Fusion-Driven Tree Reconstruction and Fruit Localization: Advancing Precision in Agriculture
Oct 23, 2023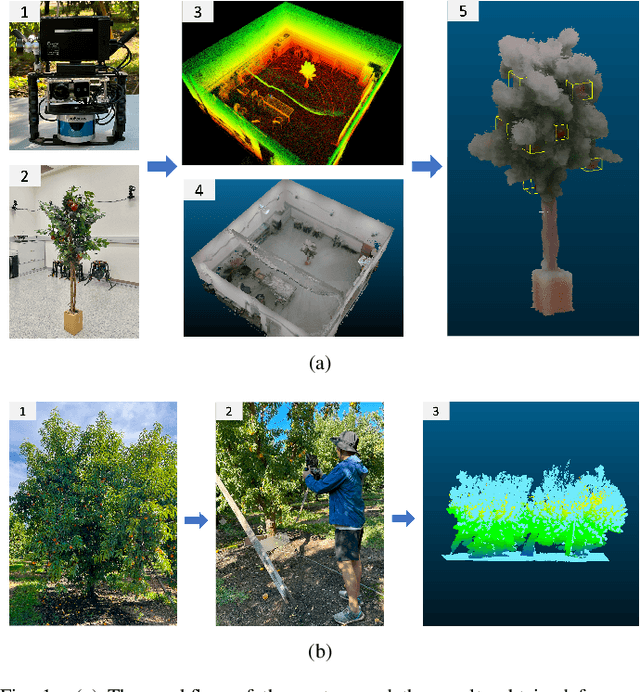
Fruit distribution is pivotal in shaping the future of both agriculture and agricultural robotics, paving the way for a streamlined supply chain. This study introduces an innovative methodology that harnesses the synergy of RGB imagery, LiDAR, and IMU data, to achieve intricate tree reconstructions and the pinpoint localization of fruits. Such integration not only offers insights into the fruit distribution, which enhances the precision of guidance for agricultural robotics and automation systems, but also sets the stage for simulating synthetic fruit patterns across varied tree architectures. To validate this approach, experiments have been carried out in both a controlled environment and an actual peach orchard. The results underscore the robustness and efficacy of this fusion-driven methodology, highlighting its potential as a transformative tool for future agricultural robotics and precision farming.
DAVIS-Ag: A Synthetic Plant Dataset for Developing Domain-Inspired Active Vision in Agricultural Robots
Mar 10, 2023



In agricultural environments, viewpoint planning can be a critical functionality for a robot with visual sensors to obtain informative observations of objects of interest (e.g., fruits) from complex structures of plant with random occlusions. Although recent studies on active vision have shown some potential for agricultural tasks, each model has been designed and validated on a unique environment that would not easily be replicated for benchmarking novel methods being developed later. In this paper, hence, we introduce a dataset for more extensive research on Domain-inspired Active VISion in Agriculture (DAVIS-Ag). To be specific, we utilized our open-source "AgML" framework and the 3D plant simulator of "Helios" to produce 502K RGB images from 30K dense spatial locations in 632 realistically synthesized orchards of strawberries, tomatoes, and grapes. In addition, useful labels are provided for each image, including (1) bounding boxes and (2) pixel-wise instance segmentations for all identifiable fruits, and also (3) pointers to other images that are reachable by an execution of action so as to simulate the active selection of viewpoint at each time step. Using DAVIS-Ag, we show the motivating examples in which performance of fruit detection for the same plant can significantly vary depending on the position and orientation of camera view primarily due to occlusions by other components such as leaves. Furthermore, we develop several baseline models to showcase the "usage" of data with one of agricultural active vision tasks--fruit search optimization--providing evaluation results against which future studies could benchmark their methodologies. For encouraging relevant research, our dataset is released online to be freely available at: https://github.com/ctyeong/DAVIS-Ag
Enlisting 3D Crop Models and GANs for More Data Efficient and Generalizable Fruit Detection
Aug 30, 2021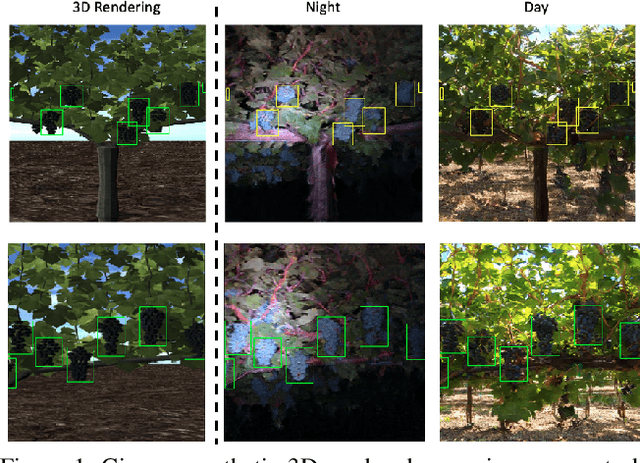


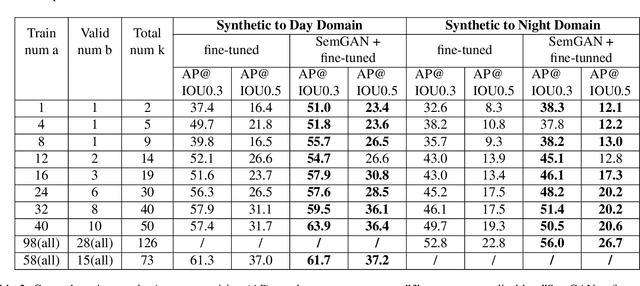
Training real-world neural network models to achieve high performance and generalizability typically requires a substantial amount of labeled data, spanning a broad range of variation. This data-labeling process can be both labor and cost intensive. To achieve desirable predictive performance, a trained model is typically applied into a domain where the data distribution is similar to the training dataset. However, for many agricultural machine learning problems, training datasets are collected at a specific location, during a specific period in time of the growing season. Since agricultural systems exhibit substantial variability in terms of crop type, cultivar, management, seasonal growth dynamics, lighting condition, sensor type, etc, a model trained from one dataset often does not generalize well across domains. To enable more data efficient and generalizable neural network models in agriculture, we propose a method that generates photorealistic agricultural images from a synthetic 3D crop model domain into real world crop domains. The method uses a semantically constrained GAN (generative adversarial network) to preserve the fruit position and geometry. We observe that a baseline CycleGAN method generates visually realistic target domain images but does not preserve fruit position information while our method maintains fruit positions well. Image generation results in vineyard grape day and night images show the visual outputs of our network are much better compared to a baseline network. Incremental training experiments in vineyard grape detection tasks show that the images generated from our method can significantly speed the domain adaption process, increase performance for a given number of labeled images (i.e. data efficiency), and decrease labeling requirements.