 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplet: A Post-hoc Subsequence Explainer for Time Series Models
May 13, 2025Explainability in time series models is crucial for fostering trust, facilitating debugging, and ensuring interpretability in real-world applications. In this work, we introduce Implet, a novel post-hoc explainer that generates accurate and concise subsequence-level explanations for time series models. Our approach identifies critical temporal segments that significantly contribute to the model's predictions, providing enhanced interpretability beyond traditional feature-attribution methods. Based on it, we propose a cohort-based (group-level) explanation framework designed to further improve the conciseness and interpretability of our explanations. We evaluate Implet on several standard time-series classification benchmarks, demonstrating its effectiveness in improving interpretability. The code is available at https://github.com/LbzSteven/implet
Energy-Optimal Planning of Waypoint-Based UAV Missions -- Does Minimum Distance Mean Minimum Energy?
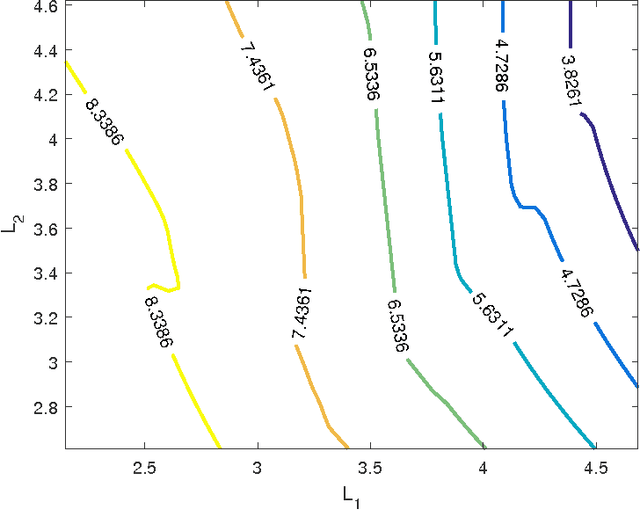
Oct 23, 2024Multirotor unmanned aerial vehicle is a prevailing type of aerial robots with wide real-world applications. The energy efficiency of the robot is a critical aspect of its performance, determining the range and duration of the missions that can be performed. This paper studies the energy-optimal planning of the multirotor, which aims at finding the optimal ordering of waypoints with the minimum energy consumption for missions in 3D space. The study is performed based on a previously developed model capturing first-principle energy dynamics of the multirotor. We found that in majority of the cases (up to 95%) the solutions of the energy-optimal planning are different from those of the traditional traveling salesman problem which minimizes the total distance. The difference can be as high as 14.9%, with the average at 1.6%-3.3% and 90th percentile at 3.7%-6.5% depending on the range and number of waypoints in the mission. We then identified and explained the key features of the minimum-energy order by correlating to the underlying flight energy dynamics. It is shown that instead of minimizing the distance, coordination of vertical and horizontal motion to promote aerodynamic efficiency is the key to optimizing energy consumption.
CohEx: A Generalized Framework for Cohort Explanation
Oct 17, 2024



eXplainable Artificial Intelligence (XAI) has garnered significant attention for enhancing transparency and trust in machine learning models. However, the scopes of most existing explanation techniques focus either on offering a holistic view of the explainee model (global explanation) or on individual instances (local explanation), while the middle ground, i.e., cohort-based explanation, is less explored. Cohort explanations offer insights into the explainee's behavior on a specific group or cohort of instances, enabling a deeper understanding of model decisions within a defined context. In this paper, we discuss the unique challenges and opportunities associated with measuring cohort explanations, define their desired properties, and create a generalized framework for generating cohort explanations based on supervised clustering.
Interpreting Inflammation Prediction Model via Tag-based Cohort Explanation
Oct 17, 2024Machine learning is revolutionizing nutrition science by enabling systems to learn from data and make intelligent decisions. However, the complexity of these models often leads to challenges in understanding their decision-making processes, necessitating the development of explainability techniques to foster trust and increase model transparency. An under-explored type of explanation is cohort explanation, which provides explanations to groups of instances with similar characteristics. Unlike traditional methods that focus on individual explanations or global model behavior, cohort explainability bridges the gap by providing unique insights at an intermediate granularity. We propose a novel framework for identifying cohorts within a dataset based on local feature importance scores, aiming to generate concise descriptions of the clusters via tags. We evaluate our framework on a food-based inflammation prediction model and demonstrated that the framework can generate reliable explanations that match domain knowledge.
A Reliable Framework for Human-in-the-Loop Anomaly Detection in Time Series
May 07, 2024



Time series anomaly detection is a critical machine learning task for numerous applications, such as finance, healthcare, and industrial systems. However, even high-performed models may exhibit potential issues such as biases, leading to unreliable outcomes and misplaced confidence. While model explanation techniques, particularly visual explanations, offer valuable insights to detect such issues by elucidating model attributions of their decision, many limitations still exist -- They are primarily instance-based and not scalable across dataset, and they provide one-directional information from the model to the human side, lacking a mechanism for users to address detected issues. To fulfill these gaps, we introduce HILAD, a novel framework designed to foster a dynamic and bidirectional collaboration between humans and AI for enhancing anomaly detection models in time series. Through our visual interface, HILAD empowers domain experts to detect, interpret, and correct unexpected model behaviors at scale. Our evaluation with two time series datasets and user studies demonstrates the effectiveness of HILAD in fostering a deeper human understanding, immediate corrective actions, and the reliability enhancement of models.
Fusion-Driven Tree Reconstruction and Fruit Localization: Advancing Precision in Agriculture
Oct 23, 2023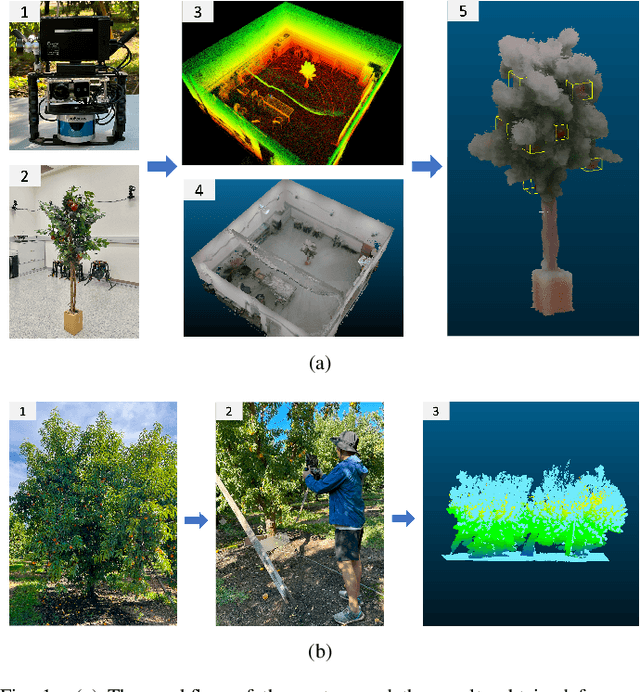
Fruit distribution is pivotal in shaping the future of both agriculture and agricultural robotics, paving the way for a streamlined supply chain. This study introduces an innovative methodology that harnesses the synergy of RGB imagery, LiDAR, and IMU data, to achieve intricate tree reconstructions and the pinpoint localization of fruits. Such integration not only offers insights into the fruit distribution, which enhances the precision of guidance for agricultural robotics and automation systems, but also sets the stage for simulating synthetic fruit patterns across varied tree architectures. To validate this approach, experiments have been carried out in both a controlled environment and an actual peach orchard. The results underscore the robustness and efficacy of this fusion-driven methodology, highlighting its potential as a transformative tool for future agricultural robotics and precision farming.
SUNY: A Visual Interpretation Framework for Convolutional Neural Networks from a Necessary and Sufficient Perspective
Mar 01, 2023



Researchers have proposed various methods for visually interpreting the Convolutional Neural Network (CNN) via saliency maps, which include Class-Activation-Map (CAM) based approaches as a leading family. However, in terms of the internal design logic, existing CAM-based approaches often overlook the causal perspective that answers the core "why" question to help humans understand the explanation. Additionally, current CNN explanations lack the consideration of both necessity and sufficiency, two complementary sides of a desirable explanation. This paper presents a causality-driven framework, SUNY, designed to rationalize the explanations toward better human understanding. Using the CNN model's input features or internal filters as hypothetical causes, SUNY generates explanations by bi-directional quantifications on both the necessary and sufficient perspectives. Extensive evaluations justify that SUNY not only produces more informative and convincing explanations from the angles of necessity and sufficiency, but also achieves performances competitive to other approaches across different CNN architectures over large-scale datasets, including ILSVRC2012 and CUB-200-2011.
Causal Explanation for Reinforcement Learning: Quantifying State and Temporal Importance
Oct 24, 2022Explainability plays an increasingly important role in machine learning. Because reinforcement learning (RL) involves interactions between states and actions over time, explaining an RL policy is more challenging than that of supervised learning. Furthermore, humans view the world from causal lens and thus prefer causal explanations over associational ones. Therefore, in this paper, we develop a causal explanation mechanism that quantifies the causal importance of states on actions and such importance over time. Moreover, via a series of simulation studies including crop irrigation, Blackjack, collision avoidance, and lunar lander, we demonstrate the advantages of our mechanism over state-of-the-art associational methods in terms of RL policy explanation.
Interpretable Fault Diagnosis of Rolling Element Bearings with Temporal Logic Neural Network
Apr 19, 2022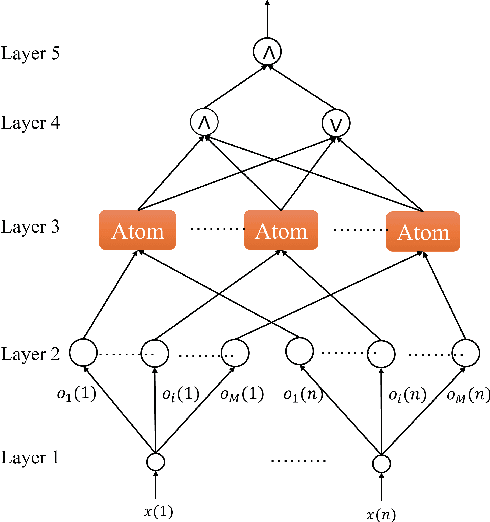
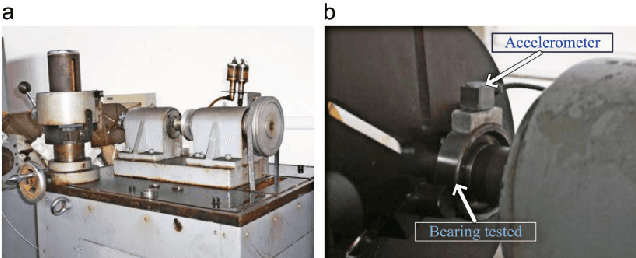
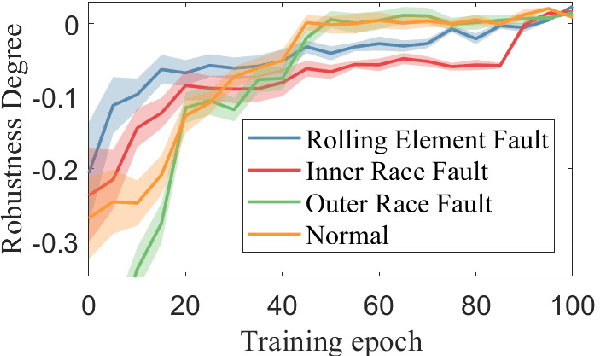
Machine learning-based methods have achieved successful applications in machinery fault diagnosis. However, the main limitation that exists for these methods is that they operate as a black box and are generally not interpretable. This paper proposes a novel neural network structure, called temporal logic neural network (TLNN), in which the neurons of the network are logic propositions. More importantly, the network can be described and interpreted as a weighted signal temporal logic. TLNN not only keeps the nice properties of traditional neuron networks but also provides a formal interpretation of itself with formal language. Experiments with real datasets show the proposed neural network can obtain highly accurate fault diagnosis results with good computation efficiency. Additionally, the embedded formal language of the neuron network can provide explanations about the decision process, thus achieve interpretable fault diagnosis.
Correct-by-Construction Approach for Self-Evolvable Robots
Feb 13, 2017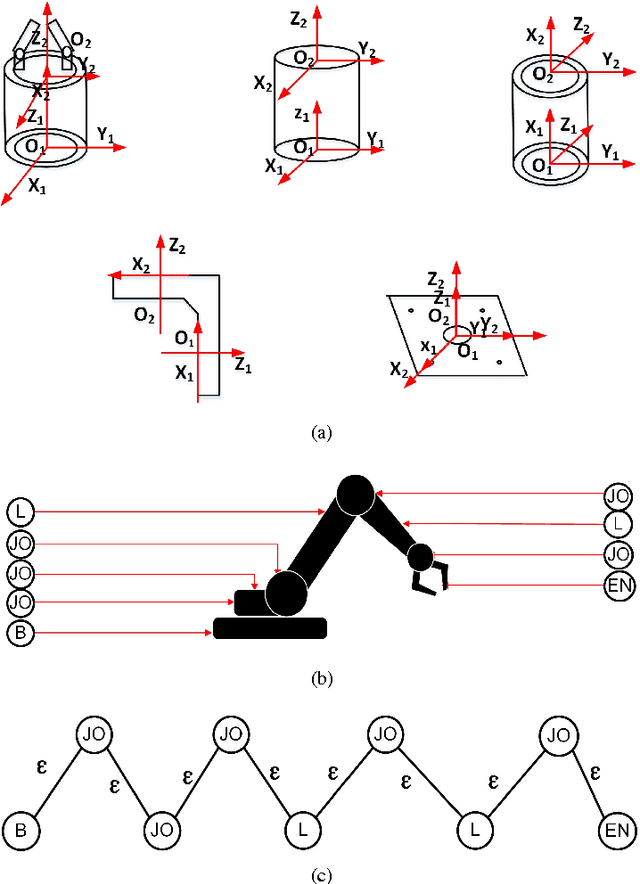
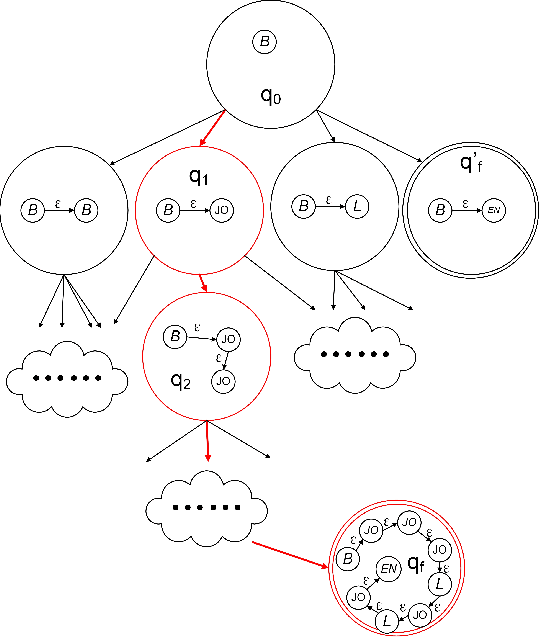
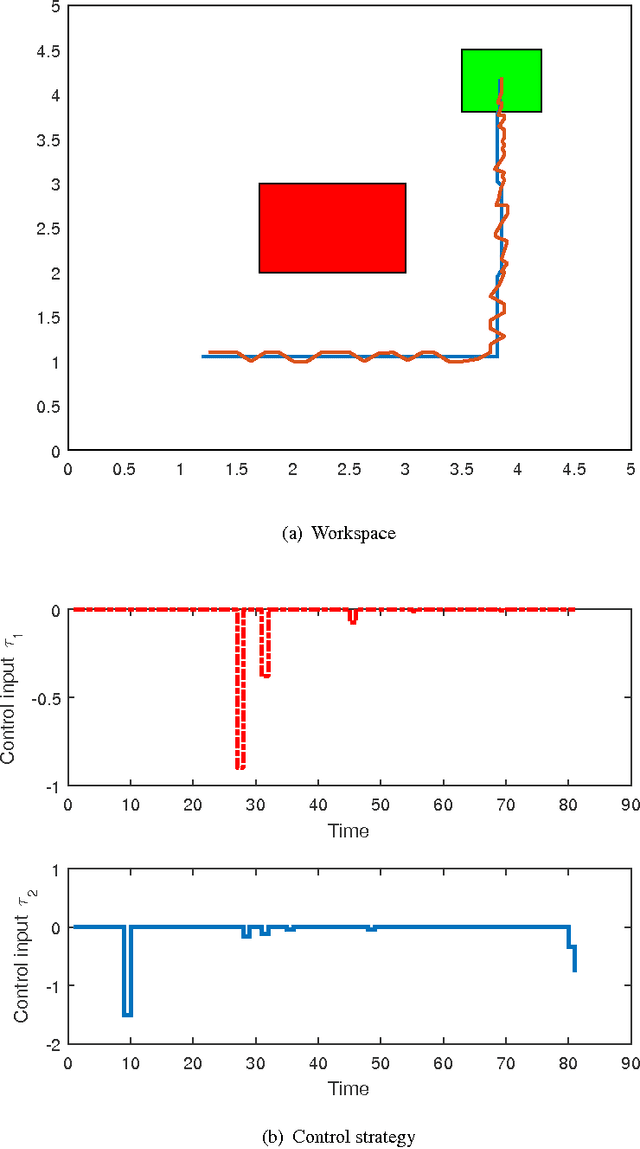
The paper presents a new formal way of modeling and designing reconfigurable robots, in which case the robots are allowed to reconfigure not only structurally but also functionally. We call such kind of robots "self-evolvable", which have the potential to be more flexible to be used in a wider range of tasks, in a wider range of environments, and with a wider range of users. To accommodate such a concept, i.e., allowing a self-evovable robot to be configured and reconfigured, we present a series of formal constructs, e.g., structural reconfigurable grammar and functional reconfigurable grammar. Furthermore, we present a correct-by-construction strategy, which, given the description of a workspace, the formula specifying a task, and a set of available modules, is capable of constructing during the design phase a robot that is guaranteed to perform the task satisfactorily. We use a planar multi-link manipulator as an example throughout the paper to demonstrate the proposed modeling and designing procedures.