 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCorrect-by-Construction Approach for Self-Evolvable Robots
Paper and Code
Feb 13, 2017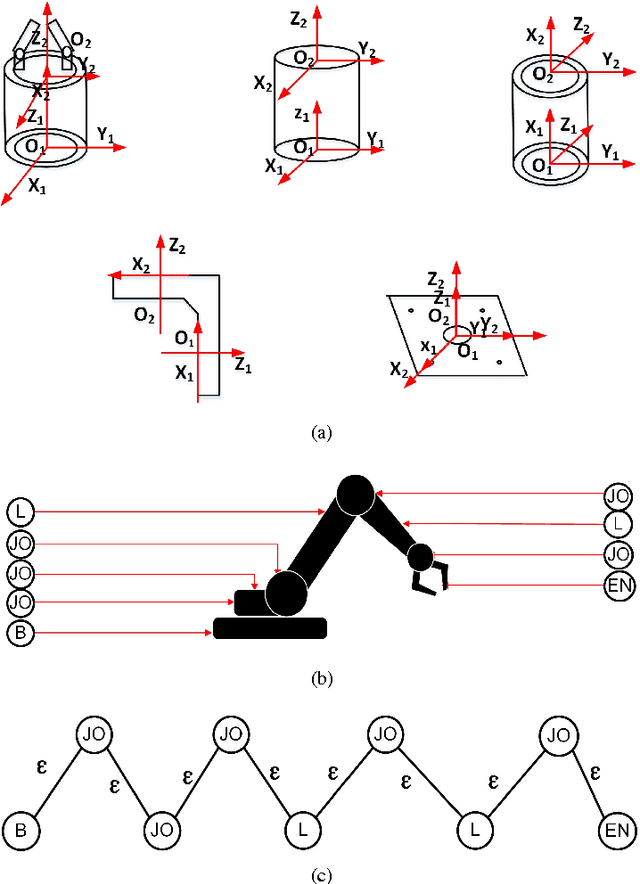
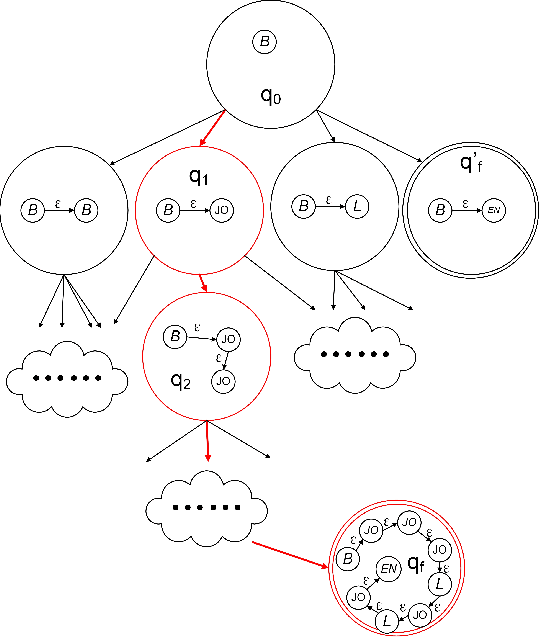
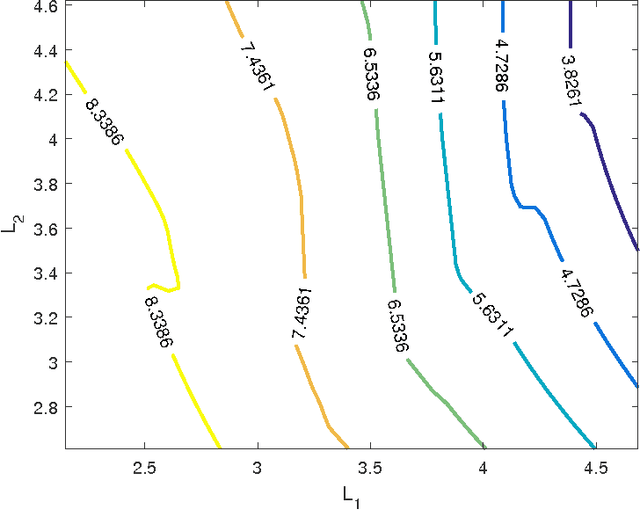
The paper presents a new formal way of modeling and designing reconfigurable robots, in which case the robots are allowed to reconfigure not only structurally but also functionally. We call such kind of robots "self-evolvable", which have the potential to be more flexible to be used in a wider range of tasks, in a wider range of environments, and with a wider range of users. To accommodate such a concept, i.e., allowing a self-evovable robot to be configured and reconfigured, we present a series of formal constructs, e.g., structural reconfigurable grammar and functional reconfigurable grammar. Furthermore, we present a correct-by-construction strategy, which, given the description of a workspace, the formula specifying a task, and a set of available modules, is capable of constructing during the design phase a robot that is guaranteed to perform the task satisfactorily. We use a planar multi-link manipulator as an example throughout the paper to demonstrate the proposed modeling and designing procedures.