 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Multirotor Drone Efficiency: Exploring Minimum Energy Consumption Rate of Forward Flight under Varying Payload
Jan 06, 2025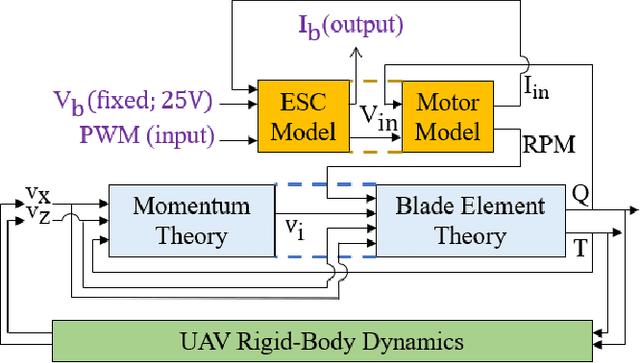
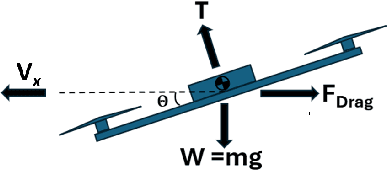
Multirotor unmanned aerial vehicle is a prevailing type of aircraft with wide real-world applications. Energy efficiency is a critical aspect of its performance, determining the range and duration of the missions that can be performed. In this study, we show both analytically and numerically that the optimum of a key energy efficiency index in forward flight, namely energy per meter traveled per unit mass, is a constant under different vehicle mass (including payload). Note that this relationship is only true under the optimal forward velocity that minimizes the energy consumption (under different mass), but not under arbitrary velocity. The study is based on a previously developed model capturing the first-principle energy dynamics of the multirotor, and a key step is to prove that the pitch angle under optimal velocity is a constant. By employing both analytical derivation and validation studies, the research provides critical insights into the optimization of multirotor energy efficiency, and facilitate the development of flight control strategies to extend mission duration and range.
* https://arc.aiaa.org/doi/10.2514/6.2025-2187
Energy-Optimal Planning of Waypoint-Based UAV Missions -- Does Minimum Distance Mean Minimum Energy?
Oct 23, 2024Multirotor unmanned aerial vehicle is a prevailing type of aerial robots with wide real-world applications. The energy efficiency of the robot is a critical aspect of its performance, determining the range and duration of the missions that can be performed. This paper studies the energy-optimal planning of the multirotor, which aims at finding the optimal ordering of waypoints with the minimum energy consumption for missions in 3D space. The study is performed based on a previously developed model capturing first-principle energy dynamics of the multirotor. We found that in majority of the cases (up to 95%) the solutions of the energy-optimal planning are different from those of the traditional traveling salesman problem which minimizes the total distance. The difference can be as high as 14.9%, with the average at 1.6%-3.3% and 90th percentile at 3.7%-6.5% depending on the range and number of waypoints in the mission. We then identified and explained the key features of the minimum-energy order by correlating to the underlying flight energy dynamics. It is shown that instead of minimizing the distance, coordination of vertical and horizontal motion to promote aerodynamic efficiency is the key to optimizing energy consumption.