 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLipschitz verification of neural networks through training
Mar 30, 2026The global Lipschitz constant of a neural network governs both adversarial robustness and generalization. Conventional approaches to ``certified training" typically follow a train-then-verify paradigm: they train a network and then attempt to bound its Lipschitz constant. Because the efficient ``trivial bound" (the product of the layerwise Lipschitz constants) is exponentially loose for arbitrary networks, these approaches must rely on computationally expensive techniques such as semidefinite programming, mixed-integer programming, or branch-and-bound. We propose a different paradigm: rather than designing complex verifiers for arbitrary networks, we design networks to be verifiable by the fast trivial bound. We show that directly penalizing the trivial bound during training forces it to become tight, thereby effectively regularizing the true Lipschitz constant. To achieve this, we identify three structural obstructions to a tight trivial bound (dead neurons, bias terms, and ill-conditioned weights) and introduce architectural mitigations, including a novel notion of norm-saturating polyactivations and bias-free sinusoidal layers. Our approach avoids the runtime complexity of advanced verification while achieving strong results: we train robust networks on MNIST with Lipschitz bounds that are small (orders of magnitude lower than comparable works) and tight (within 10% of the ground truth). The experimental results validate the theoretical guarantees, support the proposed mechanisms, and extend empirically to diverse activations and non-Euclidean norms.
Exact closed-form Gaussian moments of residual layers
Jan 29, 2026We study the problem of propagating the mean and covariance of a general multivariate Gaussian distribution through a deep (residual) neural network using layer-by-layer moment matching. We close a longstanding gap by deriving exact moment matching for the probit, GeLU, ReLU (as a limit of GeLU), Heaviside (as a limit of probit), and sine activation functions; for both feedforward and generalized residual layers. On random networks, we find orders-of-magnitude improvements in the KL divergence error metric, up to a millionfold, over popular alternatives. On real data, we find competitive statistical calibration for inference under epistemic uncertainty in the input. On a variational Bayes network, we show that our method attains hundredfold improvements in KL divergence from Monte Carlo ground truth over a state-of-the-art deterministic inference method. We also give an a priori error bound and a preliminary analysis of stochastic feedforward neurons, which have recently attracted general interest.
Assumed Density Filtering and Smoothing with Neural Network Surrogate Models
Nov 12, 2025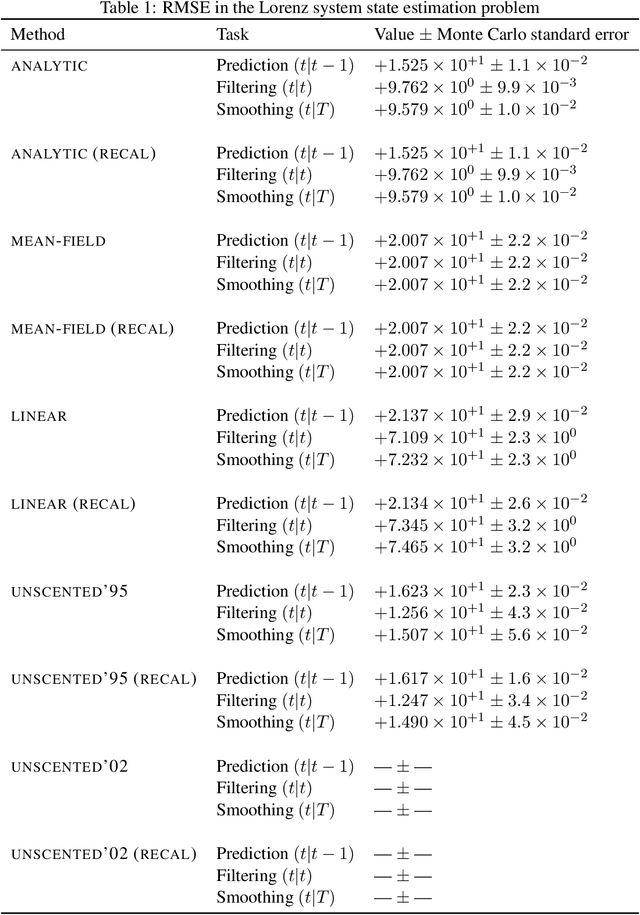
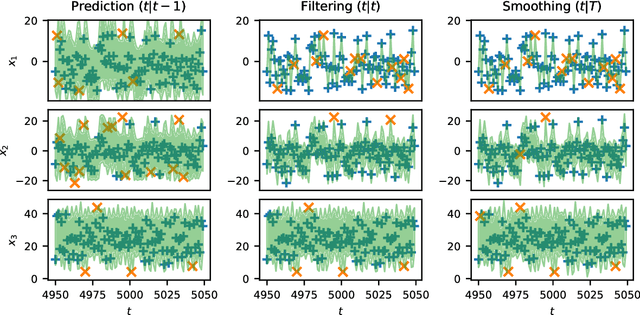


The Kalman filter and Rauch-Tung-Striebel (RTS) smoother are optimal for state estimation in linear dynamic systems. With nonlinear systems, the challenge consists in how to propagate uncertainty through the state transitions and output function. For the case of a neural network model, we enable accurate uncertainty propagation using a recent state-of-the-art analytic formula for computing the mean and covariance of a deep neural network with Gaussian input. We argue that cross entropy is a more appropriate performance metric than RMSE for evaluating the accuracy of filters and smoothers. We demonstrate the superiority of our method for state estimation on a stochastic Lorenz system and a Wiener system, and find that our method enables more optimal linear quadratic regulation when the state estimate is used for feedback.
Enhancing Multirotor Drone Efficiency: Exploring Minimum Energy Consumption Rate of Forward Flight under Varying Payload
Jan 06, 2025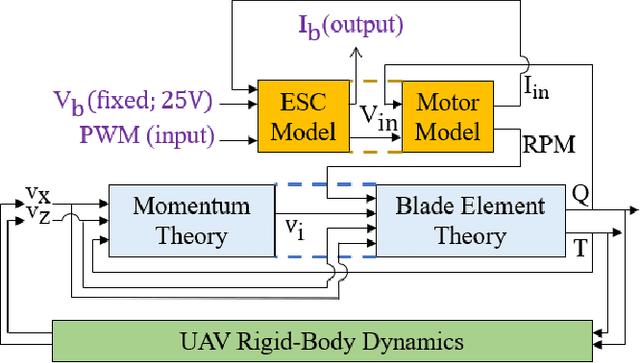
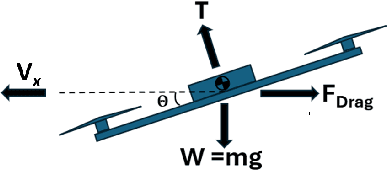
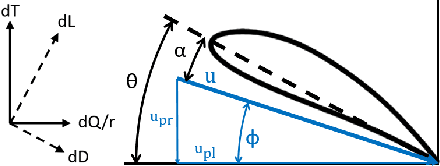
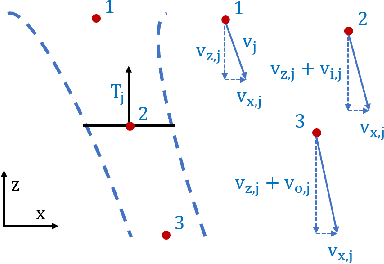
Multirotor unmanned aerial vehicle is a prevailing type of aircraft with wide real-world applications. Energy efficiency is a critical aspect of its performance, determining the range and duration of the missions that can be performed. In this study, we show both analytically and numerically that the optimum of a key energy efficiency index in forward flight, namely energy per meter traveled per unit mass, is a constant under different vehicle mass (including payload). Note that this relationship is only true under the optimal forward velocity that minimizes the energy consumption (under different mass), but not under arbitrary velocity. The study is based on a previously developed model capturing the first-principle energy dynamics of the multirotor, and a key step is to prove that the pitch angle under optimal velocity is a constant. By employing both analytical derivation and validation studies, the research provides critical insights into the optimization of multirotor energy efficiency, and facilitate the development of flight control strategies to extend mission duration and range.
* https://arc.aiaa.org/doi/10.2514/6.2025-2187
Energy-Optimal Planning of Waypoint-Based UAV Missions -- Does Minimum Distance Mean Minimum Energy?
Oct 23, 2024Multirotor unmanned aerial vehicle is a prevailing type of aerial robots with wide real-world applications. The energy efficiency of the robot is a critical aspect of its performance, determining the range and duration of the missions that can be performed. This paper studies the energy-optimal planning of the multirotor, which aims at finding the optimal ordering of waypoints with the minimum energy consumption for missions in 3D space. The study is performed based on a previously developed model capturing first-principle energy dynamics of the multirotor. We found that in majority of the cases (up to 95%) the solutions of the energy-optimal planning are different from those of the traditional traveling salesman problem which minimizes the total distance. The difference can be as high as 14.9%, with the average at 1.6%-3.3% and 90th percentile at 3.7%-6.5% depending on the range and number of waypoints in the mission. We then identified and explained the key features of the minimum-energy order by correlating to the underlying flight energy dynamics. It is shown that instead of minimizing the distance, coordination of vertical and horizontal motion to promote aerodynamic efficiency is the key to optimizing energy consumption.
Structural Constraints for Physics-augmented Learning
Oct 07, 2024When the physics is wrong, physics-informed machine learning becomes physics-misinformed machine learning. A powerful black-box model should not be able to conceal misconceived physics. We propose two criteria that can be used to assert integrity that a hybrid (physics plus black-box) model: 0) the black-box model should be unable to replicate the physical model, and 1) any best-fit hybrid model has the same physical parameter as a best-fit standalone physics model. We demonstrate them for a sample nonlinear mechanical system approximated by its small-signal linearization.
Finite-sample Identification of Continuous-time Parameter-linear Systems
Dec 08, 2023Differentiating noisy, discrete measurements in order to fit an ordinary differential equation can be unreasonably effective. Assuming square-integrable noise and minimal flow regularity, we construct and analyze a finite-difference differentiation filter and a Tikhonov-regularized least squares estimator for the continuous-time parameter-linear system. Combining these contributions in series, we obtain a finite-sample bound on mean absolute error of estimation. As a by-product, we offer a novel analysis of stochastically perturbed Moore-Penrose pseudoinverses.