 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransformer-Based Spatio-Temporal Association of Apple Fruitlets
Mar 05, 2025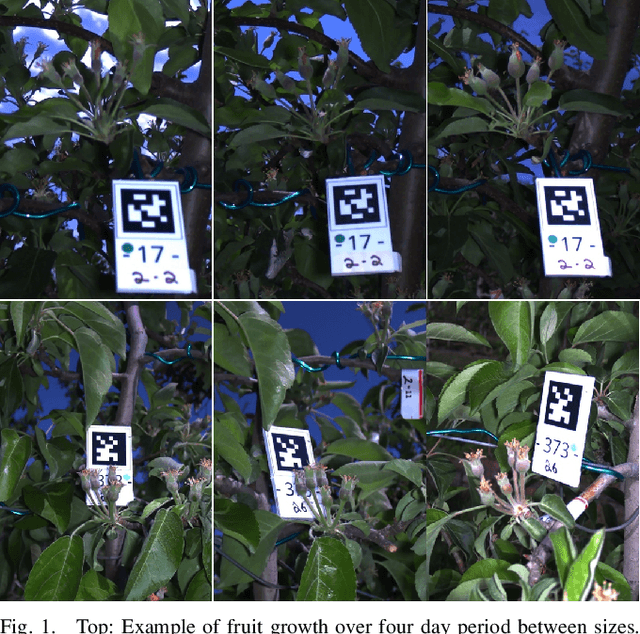
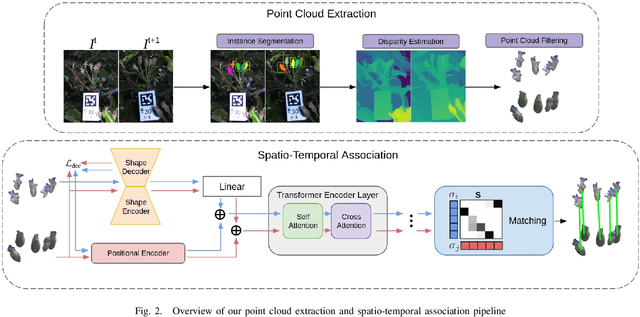
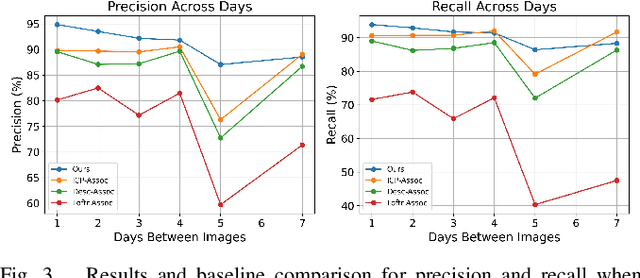
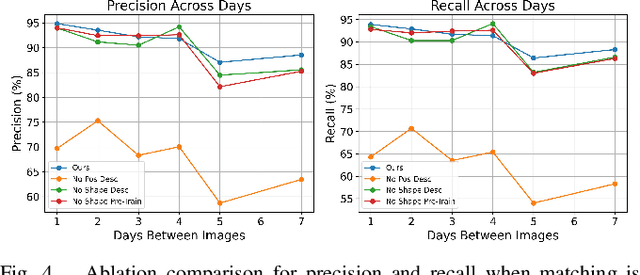
In this paper, we present a transformer-based method to spatio-temporally associate apple fruitlets in stereo-images collected on different days and from different camera poses. State-of-the-art association methods in agriculture are dedicated towards matching larger crops using either high-resolution point clouds or temporally stable features, which are both difficult to obtain for smaller fruit in the field. To address these challenges, we propose a transformer-based architecture that encodes the shape and position of each fruitlet, and propagates and refines these features through a series of transformer encoder layers with alternating self and cross-attention. We demonstrate that our method is able to achieve an F1-score of 92.4% on data collected in a commercial apple orchard and outperforms all baselines and ablations.
Toward Semantic Scene Understanding for Fine-Grained 3D Modeling of Plants
Dec 28, 2023Agricultural robotics is an active research area due to global population growth and expectations of food and labor shortages. Robots can potentially help with tasks such as pruning, harvesting, phenotyping, and plant modeling. However, agricultural automation is hampered by the difficulty in creating high resolution 3D semantic maps in the field that would allow for safe manipulation and navigation. In this paper, we build toward solutions for this issue and showcase how the use of semantics and environmental priors can help in constructing accurate 3D maps for the target application of sorghum. Specifically, we 1) use sorghum seeds as semantic landmarks to build a visual Simultaneous Localization and Mapping (SLAM) system that enables us to map 78\\% of a sorghum range on average, compared to 38% with ORB-SLAM2; and 2) use seeds as semantic features to improve 3D reconstruction of a full sorghum panicle from images taken by a robotic in-hand camera.
Autonomous Apple Fruitlet Sizing with Next Best View Planning
Sep 24, 2023



In this paper, we present a next-best-view planning approach to autonomously size apple fruitlets. State-of-the-art viewpoint planners in agriculture are designed to size large and more sparsely populated fruit. They rely on lower resolution maps and sizing methods that do not generalize to smaller fruit sizes. To overcome these limitations, our method combines viewpoint sampling around semantically labeled regions of interest, along with an attention-guided information gain mechanism to more strategically select viewpoints that target the small fruits' volume. Additionally, we integrate a dual-map representation of the environment that is able to both speed up expensive ray casting operations and maintain the high occupancy resolution required to informatively plan around the fruit. When sizing, a robust estimation and graph clustering approach is introduced to associate fruit detections across images. Through simulated experiments, we demonstrate that our viewpoint planner improves sizing accuracy compared to state of the art and ablations. We also provide quantitative results on data collected by a real robotic system in the field.
Autonomous Apple Fruitlet Sizing and Growth Rate Tracking using Computer Vision
Dec 03, 2022Measuring growth rates of apple fruitlets is important because it allows apple growers to determine when to apply chemical thinners to their crops to optimize yield. The current practice of obtaining growth rates involves using calipers to record sizes of fruitlets across multiple days. Due to the number of fruitlets needed to be sized, this method is laborious, time-consuming, and prone to human error. In this paper, we present a computer vision approach to measure the sizes and growth rates of apple fruitlets. With images collected by a hand-held stereo camera, our system detects, segments, and fits ellipses to fruitlets to measure their diameters. To measure growth rates, we utilize an Attentional Graph Neural Network to associate fruitlets across different days. We provide quantitative results on data collected in an apple orchard, and demonstrate that our system is able to predict abscise rates within 3% of the current method with a 7 times improvement in speed, while requiring significantly less manual effort. Moreover, we provide results on images captured by a robotic system in the field, and discuss the next steps to make the process fully autonomous.
3D Reconstruction-Based Seed Counting of Sorghum Panicles for Agricultural Inspection
Nov 14, 2022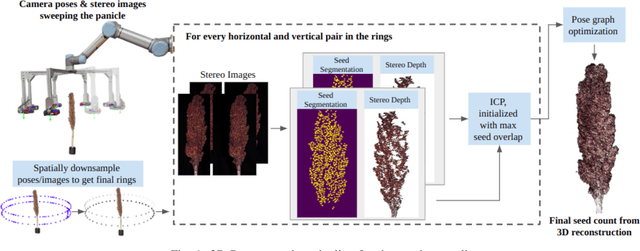

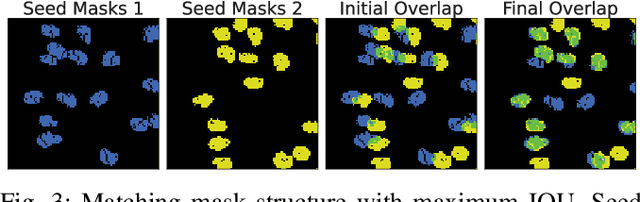
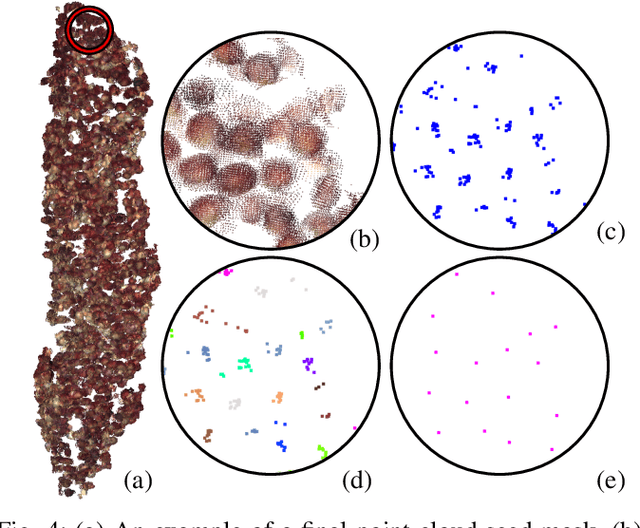
In this paper, we present a method for creating high-quality 3D models of sorghum panicles for phenotyping in breeding experiments. This is achieved with a novel reconstruction approach that uses seeds as semantic landmarks in both 2D and 3D. To evaluate the performance, we develop a new metric for assessing the quality of reconstructed point clouds without having a ground-truth point cloud. Finally, a counting method is presented where the density of seed centers in the 3D model allows 2D counts from multiple views to be effectively combined into a whole-panicle count. We demonstrate that using this method to estimate seed count and weight for sorghum outperforms count extrapolation from 2D images, an approach used in most state of the art methods for seeds and grains of comparable size.
3D Human Reconstruction in the Wild with Collaborative Aerial Cameras
Aug 09, 2021
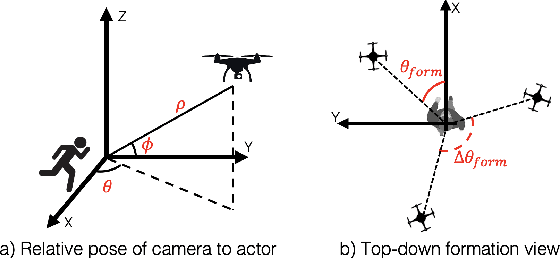
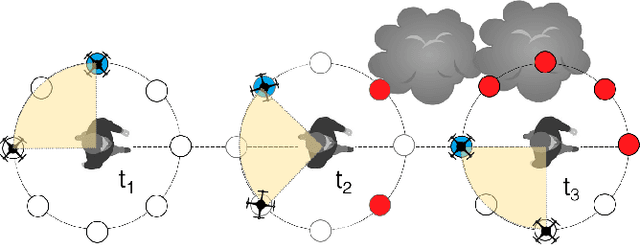

Aerial vehicles are revolutionizing applications that require capturing the 3D structure of dynamic targets in the wild, such as sports, medicine, and entertainment. The core challenges in developing a motion-capture system that operates in outdoors environments are: (1) 3D inference requires multiple simultaneous viewpoints of the target, (2) occlusion caused by obstacles is frequent when tracking moving targets, and (3) the camera and vehicle state estimation is noisy. We present a real-time aerial system for multi-camera control that can reconstruct human motions in natural environments without the use of special-purpose markers. We develop a multi-robot coordination scheme that maintains the optimal flight formation for target reconstruction quality amongst obstacles. We provide studies evaluating system performance in simulation, and validate real-world performance using two drones while a target performs activities such as jogging and playing soccer. Supplementary video: https://youtu.be/jxt91vx0cns