Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Implicit Surface Reconstruction using Imaging Sonar
Paper and Code
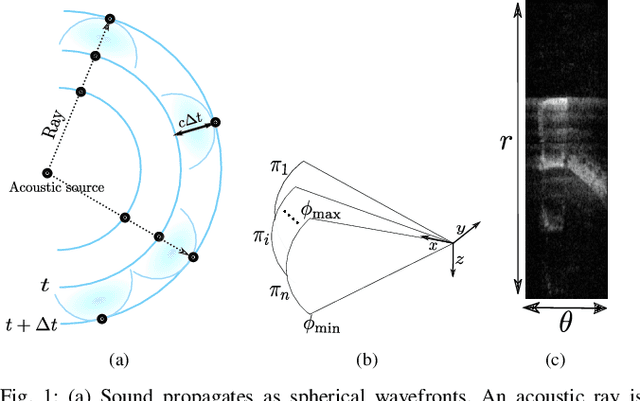
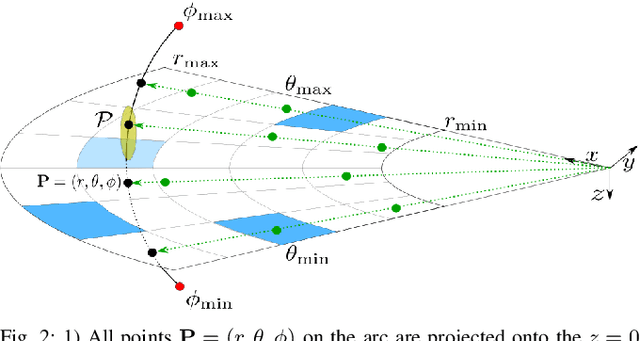
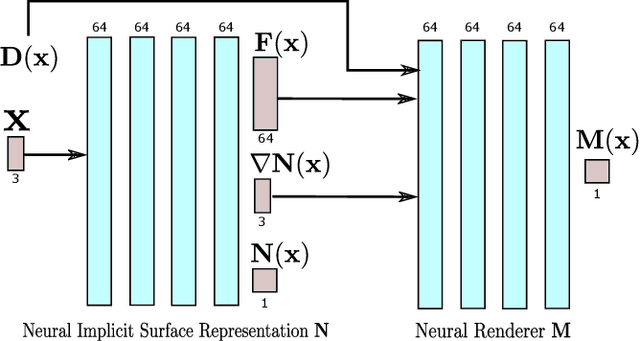
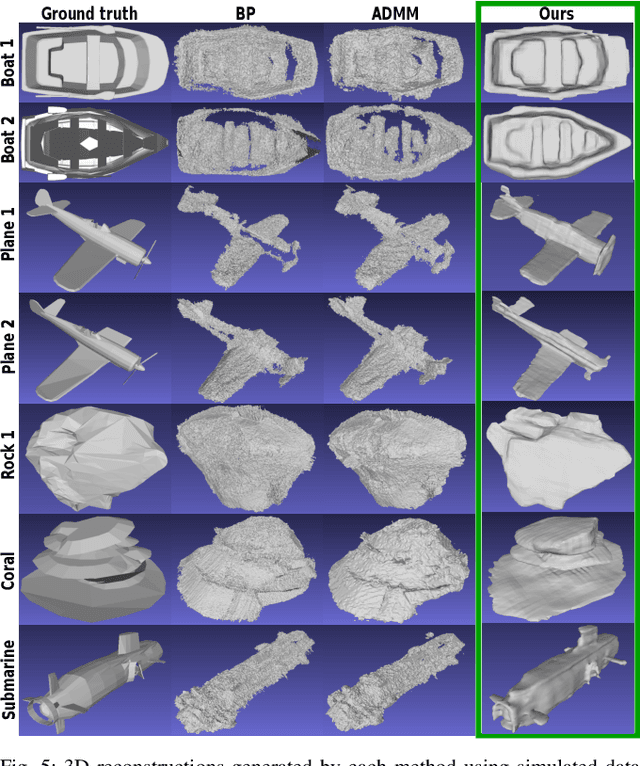
We present a technique for dense 3D reconstruction of objects using an imaging sonar, also known as forward-looking sonar (FLS). Compared to previous methods that model the scene geometry as point clouds or volumetric grids, we represent the geometry as a neural implicit function. Additionally, given such a representation, we use a differentiable volumetric renderer that models the propagation of acoustic waves to synthesize imaging sonar measurements. We perform experiments on real and synthetic datasets and show that our algorithm reconstructs high-fidelity surface geometry from multi-view FLS images at much higher quality than was possible with previous techniques and without suffering from their associated memory overhead.
* 8 pages, 8 figures. This paper is under review
View paper on