 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbing the Critical Point (CritPt) of AI Reasoning: a Frontier Physics Research Benchmark
Oct 01, 2025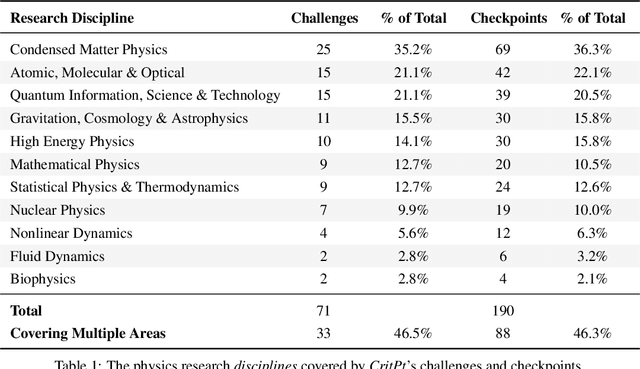
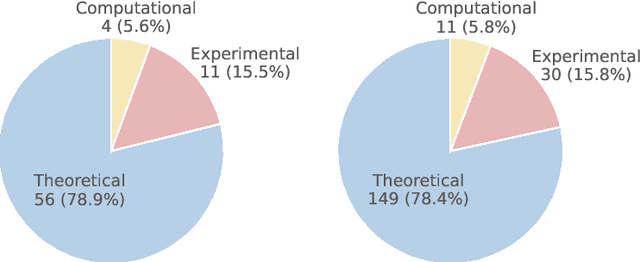
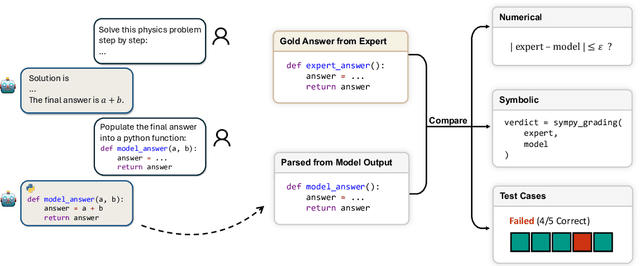
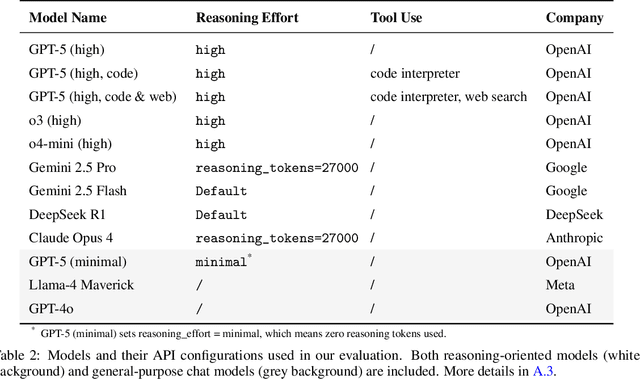
While large language models (LLMs) with reasoning capabilities are progressing rapidly on high-school math competitions and coding, can they reason effectively through complex, open-ended challenges found in frontier physics research? And crucially, what kinds of reasoning tasks do physicists want LLMs to assist with? To address these questions, we present the CritPt (Complex Research using Integrated Thinking - Physics Test, pronounced "critical point"), the first benchmark designed to test LLMs on unpublished, research-level reasoning tasks that broadly covers modern physics research areas, including condensed matter, quantum physics, atomic, molecular & optical physics, astrophysics, high energy physics, mathematical physics, statistical physics, nuclear physics, nonlinear dynamics, fluid dynamics and biophysics. CritPt consists of 71 composite research challenges designed to simulate full-scale research projects at the entry level, which are also decomposed to 190 simpler checkpoint tasks for more fine-grained insights. All problems are newly created by 50+ active physics researchers based on their own research. Every problem is hand-curated to admit a guess-resistant and machine-verifiable answer and is evaluated by an automated grading pipeline heavily customized for advanced physics-specific output formats. We find that while current state-of-the-art LLMs show early promise on isolated checkpoints, they remain far from being able to reliably solve full research-scale challenges: the best average accuracy among base models is only 4.0% , achieved by GPT-5 (high), moderately rising to around 10% when equipped with coding tools. Through the realistic yet standardized evaluation offered by CritPt, we highlight a large disconnect between current model capabilities and realistic physics research demands, offering a foundation to guide the development of scientifically grounded AI tools.
Task-Driven Implicit Representations for Automated Design of LiDAR Systems
May 28, 2025Imaging system design is a complex, time-consuming, and largely manual process; LiDAR design, ubiquitous in mobile devices, autonomous vehicles, and aerial imaging platforms, adds further complexity through unique spatial and temporal sampling requirements. In this work, we propose a framework for automated, task-driven LiDAR system design under arbitrary constraints. To achieve this, we represent LiDAR configurations in a continuous six-dimensional design space and learn task-specific implicit densities in this space via flow-based generative modeling. We then synthesize new LiDAR systems by modeling sensors as parametric distributions in 6D space and fitting these distributions to our learned implicit density using expectation-maximization, enabling efficient, constraint-aware LiDAR system design. We validate our method on diverse tasks in 3D vision, enabling automated LiDAR system design across real-world-inspired applications in face scanning, robotic tracking, and object detection.
Leveraging AI for Productive and Trustworthy HPC Software: Challenges and Research Directions
May 13, 2025We discuss the challenges and propose research directions for using AI to revolutionize the development of high-performance computing (HPC) software. AI technologies, in particular large language models, have transformed every aspect of software development. For its part, HPC software is recognized as a highly specialized scientific field of its own. We discuss the challenges associated with leveraging state-of-the-art AI technologies to develop such a unique and niche class of software and outline our research directions in the two US Department of Energy--funded projects for advancing HPC Software via AI: Ellora and Durban.
What if Eye...? Computationally Recreating Vision Evolution
Jan 25, 2025



Vision systems in nature show remarkable diversity, from simple light-sensitive patches to complex camera eyes with lenses. While natural selection has produced these eyes through countless mutations over millions of years, they represent just one set of realized evolutionary paths. Testing hypotheses about how environmental pressures shaped eye evolution remains challenging since we cannot experimentally isolate individual factors. Computational evolution offers a way to systematically explore alternative trajectories. Here we show how environmental demands drive three fundamental aspects of visual evolution through an artificial evolution framework that co-evolves both physical eye structure and neural processing in embodied agents. First, we demonstrate computational evidence that task specific selection drives bifurcation in eye evolution - orientation tasks like navigation in a maze leads to distributed compound-type eyes while an object discrimination task leads to the emergence of high-acuity camera-type eyes. Second, we reveal how optical innovations like lenses naturally emerge to resolve fundamental tradeoffs between light collection and spatial precision. Third, we uncover systematic scaling laws between visual acuity and neural processing, showing how task complexity drives coordinated evolution of sensory and computational capabilities. Our work introduces a novel paradigm that illuminates evolutionary principles shaping vision by creating targeted single-player games where embodied agents must simultaneously evolve visual systems and learn complex behaviors. Through our unified genetic encoding framework, these embodied agents serve as next-generation hypothesis testing machines while providing a foundation for designing manufacturable bio-inspired vision systems.
Blurred LiDAR for Sharper 3D: Robust Handheld 3D Scanning with Diffuse LiDAR and RGB
Nov 29, 2024



3D surface reconstruction is essential across applications of virtual reality, robotics, and mobile scanning. However, RGB-based reconstruction often fails in low-texture, low-light, and low-albedo scenes. Handheld LiDARs, now common on mobile devices, aim to address these challenges by capturing depth information from time-of-flight measurements of a coarse grid of projected dots. Yet, these sparse LiDARs struggle with scene coverage on limited input views, leaving large gaps in depth information. In this work, we propose using an alternative class of "blurred" LiDAR that emits a diffuse flash, greatly improving scene coverage but introducing spatial ambiguity from mixed time-of-flight measurements across a wide field of view. To handle these ambiguities, we propose leveraging the complementary strengths of diffuse LiDAR with RGB. We introduce a Gaussian surfel-based rendering framework with a scene-adaptive loss function that dynamically balances RGB and diffuse LiDAR signals. We demonstrate that, surprisingly, diffuse LiDAR can outperform traditional sparse LiDAR, enabling robust 3D scanning with accurate color and geometry estimation in challenging environments.
Enhancing Autonomous Navigation by Imaging Hidden Objects using Single-Photon LiDAR
Oct 04, 2024



Robust autonomous navigation in environments with limited visibility remains a critical challenge in robotics. We present a novel approach that leverages Non-Line-of-Sight (NLOS) sensing using single-photon LiDAR to improve visibility and enhance autonomous navigation. Our method enables mobile robots to "see around corners" by utilizing multi-bounce light information, effectively expanding their perceptual range without additional infrastructure. We propose a three-module pipeline: (1) Sensing, which captures multi-bounce histograms using SPAD-based LiDAR; (2) Perception, which estimates occupancy maps of hidden regions from these histograms using a convolutional neural network; and (3) Control, which allows a robot to follow safe paths based on the estimated occupancy. We evaluate our approach through simulations and real-world experiments on a mobile robot navigating an L-shaped corridor with hidden obstacles. Our work represents the first experimental demonstration of NLOS imaging for autonomous navigation, paving the way for safer and more efficient robotic systems operating in complex environments. We also contribute a novel dynamics-integrated transient rendering framework for simulating NLOS scenarios, facilitating future research in this domain.
NeST: Neural Stress Tensor Tomography by leveraging 3D Photoelasticity
Jun 14, 2024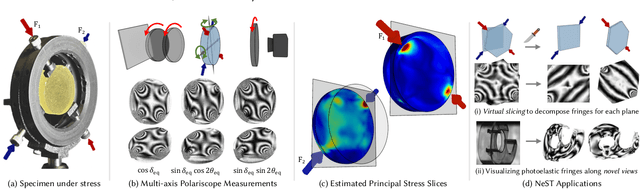
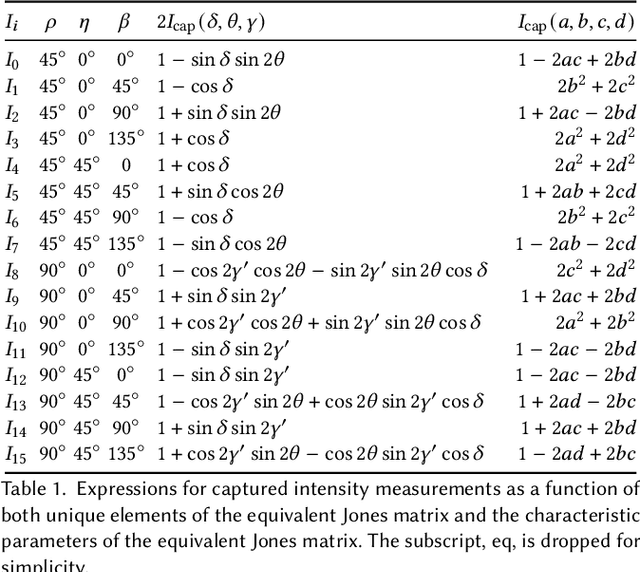

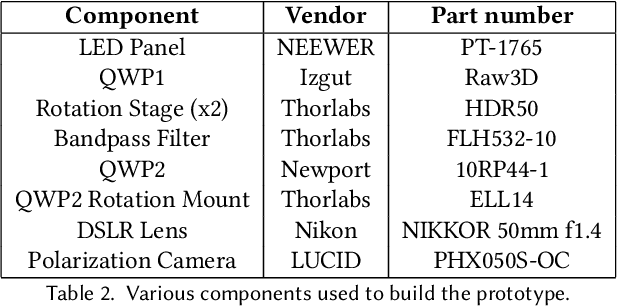
Photoelasticity enables full-field stress analysis in transparent objects through stress-induced birefringence. Existing techniques are limited to 2D slices and require destructively slicing the object. Recovering the internal 3D stress distribution of the entire object is challenging as it involves solving a tensor tomography problem and handling phase wrapping ambiguities. We introduce NeST, an analysis-by-synthesis approach for reconstructing 3D stress tensor fields as neural implicit representations from polarization measurements. Our key insight is to jointly handle phase unwrapping and tensor tomography using a differentiable forward model based on Jones calculus. Our non-linear model faithfully matches real captures, unlike prior linear approximations. We develop an experimental multi-axis polariscope setup to capture 3D photoelasticity and experimentally demonstrate that NeST reconstructs the internal stress distribution for objects with varying shape and force conditions. Additionally, we showcase novel applications in stress analysis, such as visualizing photoelastic fringes by virtually slicing the object and viewing photoelastic fringes from unseen viewpoints. NeST paves the way for scalable non-destructive 3D photoelastic analysis.
A Study on the Use of Simulation in Synthesizing Path-Following Control Policies for Autonomous Ground Robots
Mar 26, 2024We report results obtained and insights gained while answering the following question: how effective is it to use a simulator to establish path following control policies for an autonomous ground robot? While the quality of the simulator conditions the answer to this question, we found that for the simulation platform used herein, producing four control policies for path planning was straightforward once a digital twin of the controlled robot was available. The control policies established in simulation and subsequently demonstrated in the real world are PID control, MPC, and two neural network (NN) based controllers. Training the two NN controllers via imitation learning was accomplished expeditiously using seven simple maneuvers: follow three circles clockwise, follow the same circles counter-clockwise, and drive straight. A test randomization process that employs random micro-simulations is used to rank the ``goodness'' of the four control policies. The policy ranking noted in simulation correlates well with the ranking observed when the control policies were tested in the real world. The simulation platform used is publicly available and BSD3-released as open source; a public Docker image is available for reproducibility studies. It contains a dynamics engine, a sensor simulator, a ROS2 bridge, and a ROS2 autonomy stack the latter employed both in the simulator and the real world experiments.
Quantifying the Sim2real Gap for GPS and IMU Sensors
Mar 16, 2024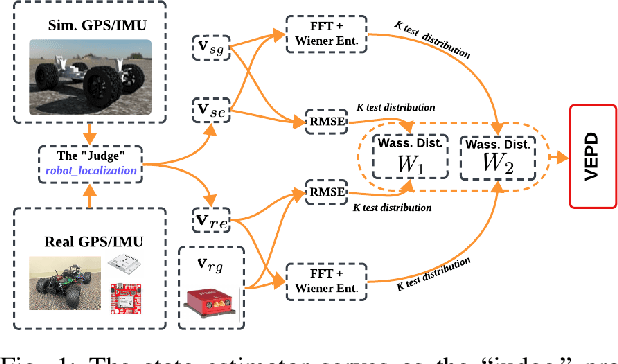
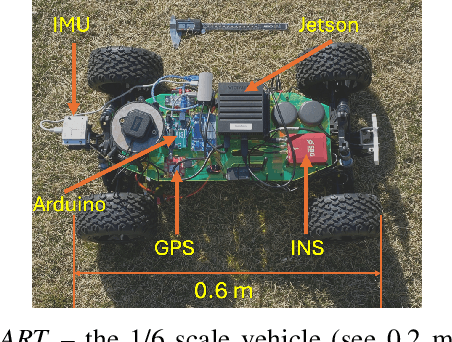
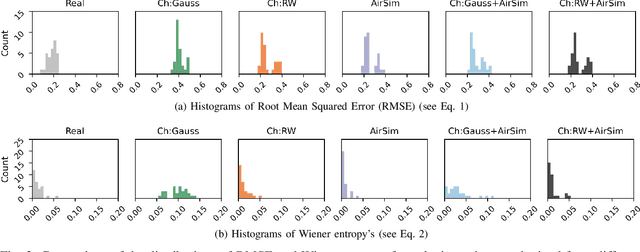
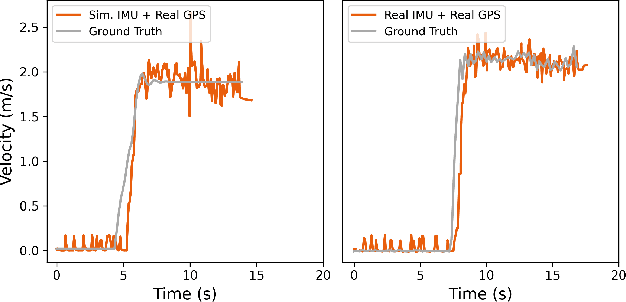
Simulation can and should play a critical role in the development and testing of algorithms for autonomous agents. What might reduce its impact is the ``sim2real'' gap -- the algorithm response differs between operation in simulated versus real-world environments. This paper introduces an approach to evaluate this gap, focusing on the accuracy of sensor simulation -- specifically IMU and GPS -- in velocity estimation tasks for autonomous agents. Using a scaled autonomous vehicle, we conduct 40 real-world experiments across diverse environments then replicate the experiments in simulation with five distinct sensor noise models. We note that direct comparison of raw simulation and real sensor data fails to quantify the sim2real gap for robotics applications. We demonstrate that by using a state of the art state-estimation package as a ``judge'', and by evaluating the performance of this state-estimator in both real and simulated scenarios, we can isolate the sim2real discrepancies stemming from sensor simulations alone. The dataset generated is open-source and publicly available for unfettered use.
Zero-Shot Policy Transferability for the Control of a Scale Autonomous Vehicle
Sep 18, 2023
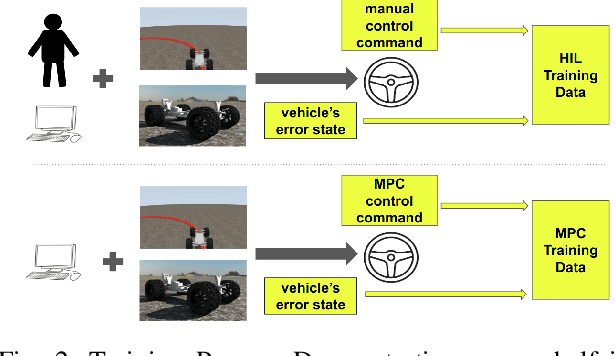
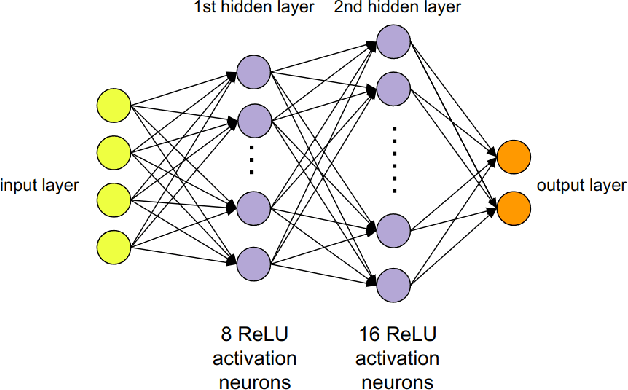
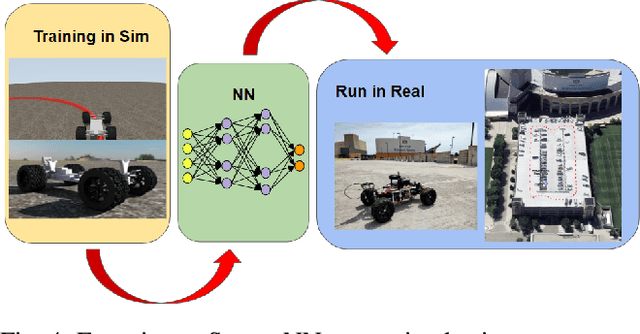
We report on a study that employs an in-house developed simulation infrastructure to accomplish zero shot policy transferability for a control policy associated with a scale autonomous vehicle. We focus on implementing policies that require no real world data to be trained (Zero-Shot Transfer), and are developed in-house as opposed to being validated by previous works. We do this by implementing a Neural Network (NN) controller that is trained only on a family of circular reference trajectories. The sensors used are RTK-GPS and IMU, the latter for providing heading. The NN controller is trained using either a human driver (via human in the loop simulation), or a Model Predictive Control (MPC) strategy. We demonstrate these two approaches in conjunction with two operation scenarios: the vehicle follows a waypoint-defined trajectory at constant speed; and the vehicle follows a speed profile that changes along the vehicle's waypoint-defined trajectory. The primary contribution of this work is the demonstration of Zero-Shot Transfer in conjunction with a novel feed-forward NN controller trained using a general purpose, in-house developed simulation platform.