 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlurred LiDAR for Sharper 3D: Robust Handheld 3D Scanning with Diffuse LiDAR and RGB
Nov 29, 2024



3D surface reconstruction is essential across applications of virtual reality, robotics, and mobile scanning. However, RGB-based reconstruction often fails in low-texture, low-light, and low-albedo scenes. Handheld LiDARs, now common on mobile devices, aim to address these challenges by capturing depth information from time-of-flight measurements of a coarse grid of projected dots. Yet, these sparse LiDARs struggle with scene coverage on limited input views, leaving large gaps in depth information. In this work, we propose using an alternative class of "blurred" LiDAR that emits a diffuse flash, greatly improving scene coverage but introducing spatial ambiguity from mixed time-of-flight measurements across a wide field of view. To handle these ambiguities, we propose leveraging the complementary strengths of diffuse LiDAR with RGB. We introduce a Gaussian surfel-based rendering framework with a scene-adaptive loss function that dynamically balances RGB and diffuse LiDAR signals. We demonstrate that, surprisingly, diffuse LiDAR can outperform traditional sparse LiDAR, enabling robust 3D scanning with accurate color and geometry estimation in challenging environments.
Event Cameras Meet SPADs for High-Speed, Low-Bandwidth Imaging
Apr 17, 2024



Traditional cameras face a trade-off between low-light performance and high-speed imaging: longer exposure times to capture sufficient light results in motion blur, whereas shorter exposures result in Poisson-corrupted noisy images. While burst photography techniques help mitigate this tradeoff, conventional cameras are fundamentally limited in their sensor noise characteristics. Event cameras and single-photon avalanche diode (SPAD) sensors have emerged as promising alternatives to conventional cameras due to their desirable properties. SPADs are capable of single-photon sensitivity with microsecond temporal resolution, and event cameras can measure brightness changes up to 1 MHz with low bandwidth requirements. We show that these properties are complementary, and can help achieve low-light, high-speed image reconstruction with low bandwidth requirements. We introduce a sensor fusion framework to combine SPADs with event cameras to improves the reconstruction of high-speed, low-light scenes while reducing the high bandwidth cost associated with using every SPAD frame. Our evaluation, on both synthetic and real sensor data, demonstrates significant enhancements ( > 5 dB PSNR) in reconstructing low-light scenes at high temporal resolution (100 kHz) compared to conventional cameras. Event-SPAD fusion shows great promise for real-world applications, such as robotics or medical imaging.
PlatoNeRF: 3D Reconstruction in Plato's Cave via Single-View Two-Bounce Lidar
Dec 21, 2023



3D reconstruction from a single-view is challenging because of the ambiguity from monocular cues and lack of information about occluded regions. Neural radiance fields (NeRF), while popular for view synthesis and 3D reconstruction, are typically reliant on multi-view images. Existing methods for single-view 3D reconstruction with NeRF rely on either data priors to hallucinate views of occluded regions, which may not be physically accurate, or shadows observed by RGB cameras, which are difficult to detect in ambient light and low albedo backgrounds. We propose using time-of-flight data captured by a single-photon avalanche diode to overcome these limitations. Our method models two-bounce optical paths with NeRF, using lidar transient data for supervision. By leveraging the advantages of both NeRF and two-bounce light measured by lidar, we demonstrate that we can reconstruct visible and occluded geometry without data priors or reliance on controlled ambient lighting or scene albedo. In addition, we demonstrate improved generalization under practical constraints on sensor spatial- and temporal-resolution. We believe our method is a promising direction as single-photon lidars become ubiquitous on consumer devices, such as phones, tablets, and headsets.
Role of Transients in Two-Bounce Non-Line-of-Sight Imaging
Apr 03, 2023



The goal of non-line-of-sight (NLOS) imaging is to image objects occluded from the camera's field of view using multiply scattered light. Recent works have demonstrated the feasibility of two-bounce (2B) NLOS imaging by scanning a laser and measuring cast shadows of occluded objects in scenes with two relay surfaces. In this work, we study the role of time-of-flight (ToF) measurements, \ie transients, in 2B-NLOS under multiplexed illumination. Specifically, we study how ToF information can reduce the number of measurements and spatial resolution needed for shape reconstruction. We present our findings with respect to tradeoffs in (1) temporal resolution, (2) spatial resolution, and (3) number of image captures by studying SNR and recoverability as functions of system parameters. This leads to a formal definition of the mathematical constraints for 2B lidar. We believe that our work lays an analytical groundwork for design of future NLOS imaging systems, especially as ToF sensors become increasingly ubiquitous.
Detection and Mapping of Specular Surfaces Using Multibounce Lidar Returns
Sep 07, 2022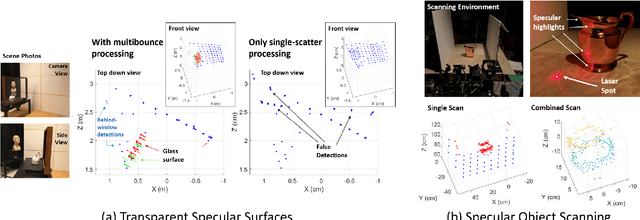
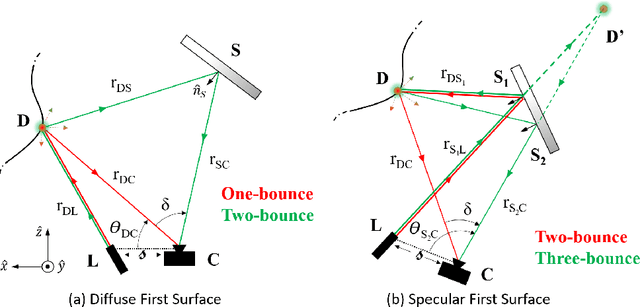
We propose methods that use specular, multibounce lidar returns to detect and map specular surfaces that might be invisible to conventional lidar systems that rely on direct, single-scatter returns. We derive expressions that relate the time- and angle-of-arrival of these multibounce returns to scattering points on the specular surface, and then use these expressions to formulate techniques for retrieving specular surface geometry when the scene is scanned by a single beam or illuminated with a multi-beam flash. We also consider the special case of transparent specular surfaces, for which surface reflections can be mixed together with light that scatters off of objects lying behind the surface.
Physics vs. Learned Priors: Rethinking Camera and Algorithm Design for Task-Specific Imaging
Apr 21, 2022



Cameras were originally designed using physics-based heuristics to capture aesthetic images. In recent years, there has been a transformation in camera design from being purely physics-driven to increasingly data-driven and task-specific. In this paper, we present a framework to understand the building blocks of this nascent field of end-to-end design of camera hardware and algorithms. As part of this framework, we show how methods that exploit both physics and data have become prevalent in imaging and computer vision, underscoring a key trend that will continue to dominate the future of task-specific camera design. Finally, we share current barriers to progress in end-to-end design, and hypothesize how these barriers can be overcome.