 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRole of Transients in Two-Bounce Non-Line-of-Sight Imaging
Apr 03, 2023



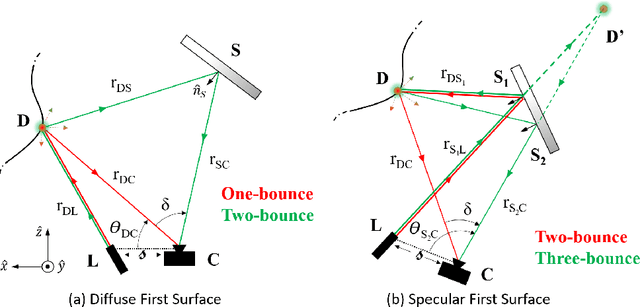
The goal of non-line-of-sight (NLOS) imaging is to image objects occluded from the camera's field of view using multiply scattered light. Recent works have demonstrated the feasibility of two-bounce (2B) NLOS imaging by scanning a laser and measuring cast shadows of occluded objects in scenes with two relay surfaces. In this work, we study the role of time-of-flight (ToF) measurements, \ie transients, in 2B-NLOS under multiplexed illumination. Specifically, we study how ToF information can reduce the number of measurements and spatial resolution needed for shape reconstruction. We present our findings with respect to tradeoffs in (1) temporal resolution, (2) spatial resolution, and (3) number of image captures by studying SNR and recoverability as functions of system parameters. This leads to a formal definition of the mathematical constraints for 2B lidar. We believe that our work lays an analytical groundwork for design of future NLOS imaging systems, especially as ToF sensors become increasingly ubiquitous.
Detection and Mapping of Specular Surfaces Using Multibounce Lidar Returns
Sep 07, 2022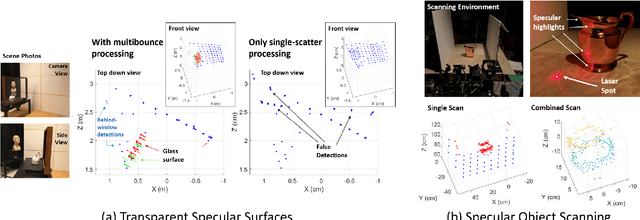
We propose methods that use specular, multibounce lidar returns to detect and map specular surfaces that might be invisible to conventional lidar systems that rely on direct, single-scatter returns. We derive expressions that relate the time- and angle-of-arrival of these multibounce returns to scattering points on the specular surface, and then use these expressions to formulate techniques for retrieving specular surface geometry when the scene is scanned by a single beam or illuminated with a multi-beam flash. We also consider the special case of transparent specular surfaces, for which surface reflections can be mixed together with light that scatters off of objects lying behind the surface.