 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUpgrade or Switch: Do We Need a New Registry Architecture for the Internet of AI Agents?
Jun 13, 2025The emerging Internet of AI Agents challenges existing web infrastructure designed for human-scale, reactive interactions. Unlike traditional web resources, autonomous AI agents initiate actions, maintain persistent state, spawn sub-agents, and negotiate directly with peers: demanding millisecond-level discovery, instant credential revocation, and cryptographic behavioral proofs that exceed current DNS/PKI capabilities. This paper analyzes whether to upgrade existing infrastructure or implement purpose-built registry architectures for autonomous agents. We identify critical failure points: DNS propagation (24-48 hours vs. required milliseconds), certificate revocation unable to scale to trillions of entities, and IPv4/IPv6 addressing inadequate for agent-scale routing. We evaluate three approaches: (1) Upgrade paths, (2) Switch options, (3) Hybrid registries. Drawing parallels to dialup-to-broadband transitions, we find that agent requirements constitute qualitative, and not incremental, changes. While upgrades offer compatibility and faster deployment, clean-slate solutions provide better performance but require longer for adoption. Our analysis suggests hybrid approaches will emerge, with centralized registries for critical agents and federated meshes for specialized use cases.
Task-Driven Implicit Representations for Automated Design of LiDAR Systems
May 28, 2025Imaging system design is a complex, time-consuming, and largely manual process; LiDAR design, ubiquitous in mobile devices, autonomous vehicles, and aerial imaging platforms, adds further complexity through unique spatial and temporal sampling requirements. In this work, we propose a framework for automated, task-driven LiDAR system design under arbitrary constraints. To achieve this, we represent LiDAR configurations in a continuous six-dimensional design space and learn task-specific implicit densities in this space via flow-based generative modeling. We then synthesize new LiDAR systems by modeling sensors as parametric distributions in 6D space and fitting these distributions to our learned implicit density using expectation-maximization, enabling efficient, constraint-aware LiDAR system design. We validate our method on diverse tasks in 3D vision, enabling automated LiDAR system design across real-world-inspired applications in face scanning, robotic tracking, and object detection.
Collaborative Agentic AI Needs Interoperability Across Ecosystems
May 25, 2025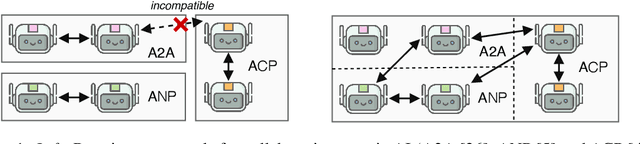
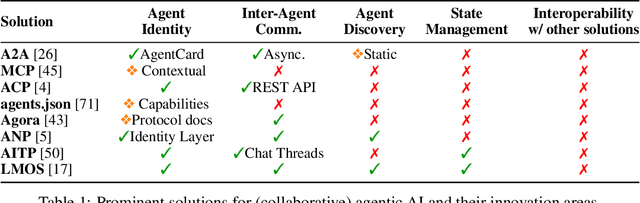
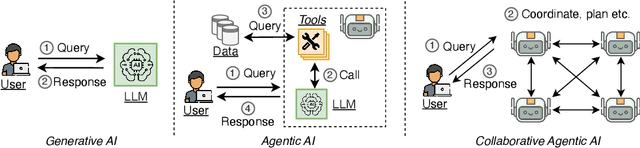
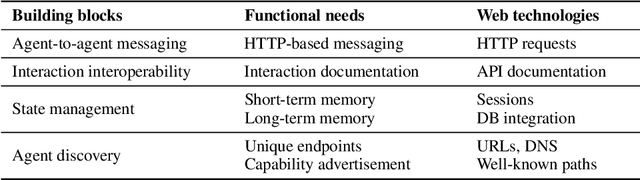
Collaborative agentic AI is projected to transform entire industries by enabling AI-powered agents to autonomously perceive, plan, and act within digital environments. Yet, current solutions in this field are all built in isolation, and we are rapidly heading toward a landscape of fragmented, incompatible ecosystems. In this position paper, we argue that interoperability, achieved by the adoption of minimal standards, is essential to ensure open, secure, web-scale, and widely-adopted agentic ecosystems. To this end, we devise a minimal architectural foundation for collaborative agentic AI, named Web of Agents, which is composed of four components: agent-to-agent messaging, interaction interoperability, state management, and agent discovery. Web of Agents adopts existing standards and reuses existing infrastructure where possible. With Web of Agents, we take the first but critical step toward interoperable agentic systems and offer a pragmatic path forward before ecosystem fragmentation becomes the norm.
A Novel Zero-Trust Identity Framework for Agentic AI: Decentralized Authentication and Fine-Grained Access Control
May 25, 2025Traditional Identity and Access Management (IAM) systems, primarily designed for human users or static machine identities via protocols such as OAuth, OpenID Connect (OIDC), and SAML, prove fundamentally inadequate for the dynamic, interdependent, and often ephemeral nature of AI agents operating at scale within Multi Agent Systems (MAS), a computational system composed of multiple interacting intelligent agents that work collectively. This paper posits the imperative for a novel Agentic AI IAM framework: We deconstruct the limitations of existing protocols when applied to MAS, illustrating with concrete examples why their coarse-grained controls, single-entity focus, and lack of context-awareness falter. We then propose a comprehensive framework built upon rich, verifiable Agent Identities (IDs), leveraging Decentralized Identifiers (DIDs) and Verifiable Credentials (VCs), that encapsulate an agents capabilities, provenance, behavioral scope, and security posture. Our framework includes an Agent Naming Service (ANS) for secure and capability-aware discovery, dynamic fine-grained access control mechanisms, and critically, a unified global session management and policy enforcement layer for real-time control and consistent revocation across heterogeneous agent communication protocols. We also explore how Zero-Knowledge Proofs (ZKPs) enable privacy-preserving attribute disclosure and verifiable policy compliance. We outline the architecture, operational lifecycle, innovative contributions, and security considerations of this new IAM paradigm, aiming to establish the foundational trust, accountability, and security necessary for the burgeoning field of agentic AI and the complex ecosystems they will inhabit.
What if Eye...? Computationally Recreating Vision Evolution
Jan 25, 2025



Vision systems in nature show remarkable diversity, from simple light-sensitive patches to complex camera eyes with lenses. While natural selection has produced these eyes through countless mutations over millions of years, they represent just one set of realized evolutionary paths. Testing hypotheses about how environmental pressures shaped eye evolution remains challenging since we cannot experimentally isolate individual factors. Computational evolution offers a way to systematically explore alternative trajectories. Here we show how environmental demands drive three fundamental aspects of visual evolution through an artificial evolution framework that co-evolves both physical eye structure and neural processing in embodied agents. First, we demonstrate computational evidence that task specific selection drives bifurcation in eye evolution - orientation tasks like navigation in a maze leads to distributed compound-type eyes while an object discrimination task leads to the emergence of high-acuity camera-type eyes. Second, we reveal how optical innovations like lenses naturally emerge to resolve fundamental tradeoffs between light collection and spatial precision. Third, we uncover systematic scaling laws between visual acuity and neural processing, showing how task complexity drives coordinated evolution of sensory and computational capabilities. Our work introduces a novel paradigm that illuminates evolutionary principles shaping vision by creating targeted single-player games where embodied agents must simultaneously evolve visual systems and learn complex behaviors. Through our unified genetic encoding framework, these embodied agents serve as next-generation hypothesis testing machines while providing a foundation for designing manufacturable bio-inspired vision systems.
Blurred LiDAR for Sharper 3D: Robust Handheld 3D Scanning with Diffuse LiDAR and RGB
Nov 29, 2024



3D surface reconstruction is essential across applications of virtual reality, robotics, and mobile scanning. However, RGB-based reconstruction often fails in low-texture, low-light, and low-albedo scenes. Handheld LiDARs, now common on mobile devices, aim to address these challenges by capturing depth information from time-of-flight measurements of a coarse grid of projected dots. Yet, these sparse LiDARs struggle with scene coverage on limited input views, leaving large gaps in depth information. In this work, we propose using an alternative class of "blurred" LiDAR that emits a diffuse flash, greatly improving scene coverage but introducing spatial ambiguity from mixed time-of-flight measurements across a wide field of view. To handle these ambiguities, we propose leveraging the complementary strengths of diffuse LiDAR with RGB. We introduce a Gaussian surfel-based rendering framework with a scene-adaptive loss function that dynamically balances RGB and diffuse LiDAR signals. We demonstrate that, surprisingly, diffuse LiDAR can outperform traditional sparse LiDAR, enabling robust 3D scanning with accurate color and geometry estimation in challenging environments.
Enhancing Autonomous Navigation by Imaging Hidden Objects using Single-Photon LiDAR
Oct 04, 2024



Robust autonomous navigation in environments with limited visibility remains a critical challenge in robotics. We present a novel approach that leverages Non-Line-of-Sight (NLOS) sensing using single-photon LiDAR to improve visibility and enhance autonomous navigation. Our method enables mobile robots to "see around corners" by utilizing multi-bounce light information, effectively expanding their perceptual range without additional infrastructure. We propose a three-module pipeline: (1) Sensing, which captures multi-bounce histograms using SPAD-based LiDAR; (2) Perception, which estimates occupancy maps of hidden regions from these histograms using a convolutional neural network; and (3) Control, which allows a robot to follow safe paths based on the estimated occupancy. We evaluate our approach through simulations and real-world experiments on a mobile robot navigating an L-shaped corridor with hidden obstacles. Our work represents the first experimental demonstration of NLOS imaging for autonomous navigation, paving the way for safer and more efficient robotic systems operating in complex environments. We also contribute a novel dynamics-integrated transient rendering framework for simulating NLOS scenarios, facilitating future research in this domain.
On the limits of agency in agent-based models
Sep 14, 2024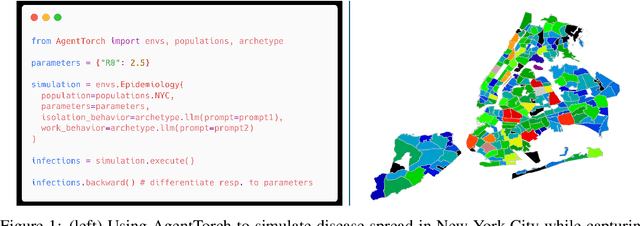
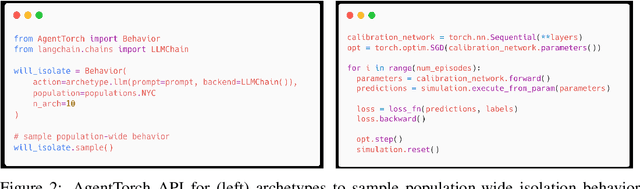
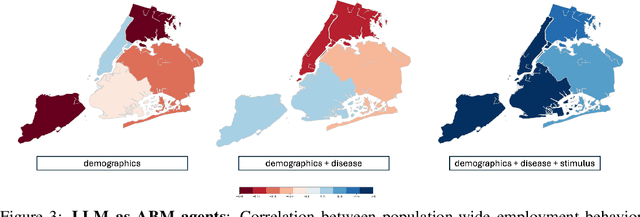
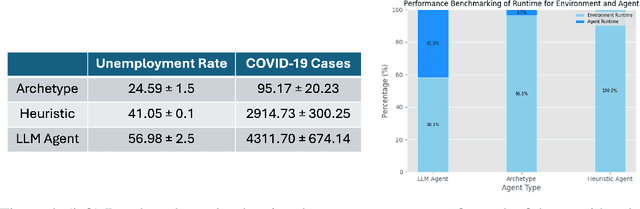
Agent-based modeling (ABM) seeks to understand the behavior of complex systems by simulating a collection of agents that act and interact within an environment. Their practical utility requires capturing realistic environment dynamics and adaptive agent behavior while efficiently simulating million-size populations. Recent advancements in large language models (LLMs) present an opportunity to enhance ABMs by using LLMs as agents with further potential to capture adaptive behavior. However, the computational infeasibility of using LLMs for large populations has hindered their widespread adoption. In this paper, we introduce AgentTorch -- a framework that scales ABMs to millions of agents while capturing high-resolution agent behavior using LLMs. We benchmark the utility of LLMs as ABM agents, exploring the trade-off between simulation scale and individual agency. Using the COVID-19 pandemic as a case study, we demonstrate how AgentTorch can simulate 8.4 million agents representing New York City, capturing the impact of isolation and employment behavior on health and economic outcomes. We compare the performance of different agent architectures based on heuristic and LLM agents in predicting disease waves and unemployment rates. Furthermore, we showcase AgentTorch's capabilities for retrospective, counterfactual, and prospective analyses, highlighting how adaptive agent behavior can help overcome the limitations of historical data in policy design. AgentTorch is an open-source project actively being used for policy-making and scientific discovery around the world. The framework is available here: github.com/AgentTorch/AgentTorch.
Privacy-Preserving Split Learning with Vision Transformers using Patch-Wise Random and Noisy CutMix
Aug 02, 2024



In computer vision, the vision transformer (ViT) has increasingly superseded the convolutional neural network (CNN) for improved accuracy and robustness. However, ViT's large model sizes and high sample complexity make it difficult to train on resource-constrained edge devices. Split learning (SL) emerges as a viable solution, leveraging server-side resources to train ViTs while utilizing private data from distributed devices. However, SL requires additional information exchange for weight updates between the device and the server, which can be exposed to various attacks on private training data. To mitigate the risk of data breaches in classification tasks, inspired from the CutMix regularization, we propose a novel privacy-preserving SL framework that injects Gaussian noise into smashed data and mixes randomly chosen patches of smashed data across clients, coined DP-CutMixSL. Our analysis demonstrates that DP-CutMixSL is a differentially private (DP) mechanism that strengthens privacy protection against membership inference attacks during forward propagation. Through simulations, we show that DP-CutMixSL improves privacy protection against membership inference attacks, reconstruction attacks, and label inference attacks, while also improving accuracy compared to DP-SL and DP-MixSL.
NeST: Neural Stress Tensor Tomography by leveraging 3D Photoelasticity
Jun 14, 2024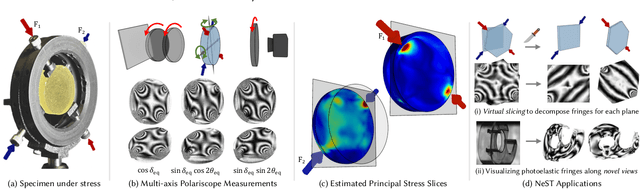
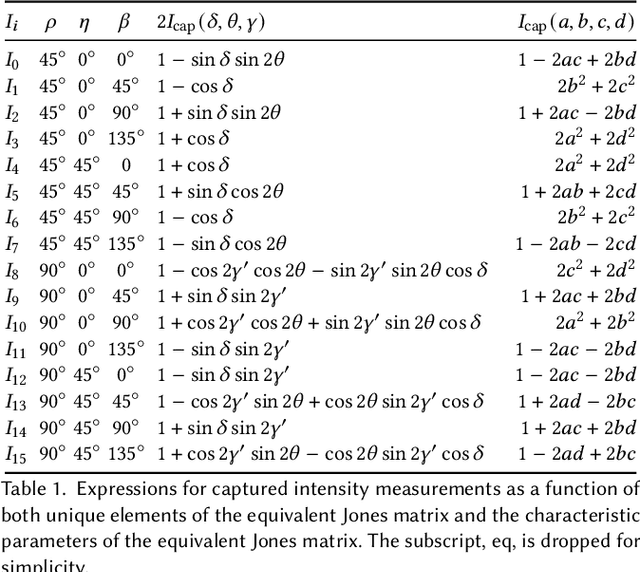

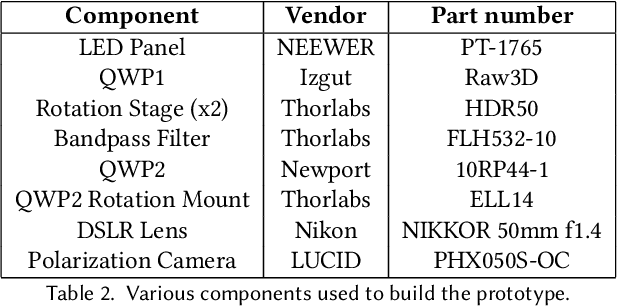
Photoelasticity enables full-field stress analysis in transparent objects through stress-induced birefringence. Existing techniques are limited to 2D slices and require destructively slicing the object. Recovering the internal 3D stress distribution of the entire object is challenging as it involves solving a tensor tomography problem and handling phase wrapping ambiguities. We introduce NeST, an analysis-by-synthesis approach for reconstructing 3D stress tensor fields as neural implicit representations from polarization measurements. Our key insight is to jointly handle phase unwrapping and tensor tomography using a differentiable forward model based on Jones calculus. Our non-linear model faithfully matches real captures, unlike prior linear approximations. We develop an experimental multi-axis polariscope setup to capture 3D photoelasticity and experimentally demonstrate that NeST reconstructs the internal stress distribution for objects with varying shape and force conditions. Additionally, we showcase novel applications in stress analysis, such as visualizing photoelastic fringes by virtually slicing the object and viewing photoelastic fringes from unseen viewpoints. NeST paves the way for scalable non-destructive 3D photoelastic analysis.