 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeV2X Sidelink Positioning in FR1: From Ray-Tracing and Channel Estimation to Bayesian Tracking
Jun 25, 2024



Sidelink positioning research predominantly focuses on the snapshot positioning problem, often within the mmWave band. Only a limited number of studies have delved into vehicle-to-anything (V2X) tracking within sub-6 GHz bands. In this paper, we investigate the V2X sidelink tracking challenges over sub-6 GHz frequencies. We propose a Kalman-filter-based tracking approach that leverages the estimated error covariance lower bounds (EECLBs) as measurement covariance, alongside a gating method to augment tracking performance. Through simulations employing ray-tracing data and super-resolution channel parameter estimation, we validate the feasibility of sidelink tracking using our proposed tracking filter with two novel EECLBs. Additionally, we demonstrate the efficacy of the gating method in identifying line-of-sight paths and enhancing tracking performance.
V2X Sidelink Positioning in FR1: Scenarios, Algorithms, and Performance Evaluation
Oct 20, 2023

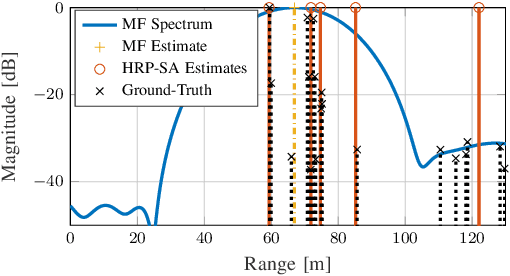

In this paper, we investigate sub-6 GHz V2X sidelink positioning scenarios in 5G vehicular networks through a comprehensive end-to-end methodology encompassing ray-tracing-based channel modeling, novel theoretical performance bounds, high-resolution channel parameter estimation, and geometric positioning using a round-trip-time (RTT) protocol. We first derive a novel, approximate Cram\'er-Rao bound (CRB) on the connected road user (CRU) position, explicitly taking into account multipath interference, path merging, and the RTT protocol. Capitalizing on tensor decomposition and ESPRIT methods, we propose high-resolution channel parameter estimation algorithms specifically tailored to dense multipath V2X sidelink environments, designed to detect multipath components (MPCs) and extract line-of-sight (LoS) parameters. Finally, using realistic ray-tracing data and antenna patterns, comprehensive simulations are conducted to evaluate channel estimation and positioning performance, indicating that sub-meter accuracy can be achieved in sub-6 GHz V2X with the proposed algorithms.
Using simulation to design an MPC policy for field navigation using GPS sensing
Apr 18, 2023



Modeling a robust control system with a precise GPS-based state estimation capability in simulation can be useful in field navigation applications as it allows for testing and validation in a controlled environment. This testing process would enable navigation systems to be developed and optimized in simulation with direct transferability to real-world scenarios. The multi-physics simulation engine Chrono allows for the creation of scenarios that may be difficult or dangerous to replicate in the field, such as extreme weather or terrain conditions. Autonomy Research Testbed (ART), a specialized robotics algorithm testbed, is operated in conjunction with Chrono to develop an MPC control policy as well as an EKF state estimator. This platform enables users to easily integrate custom algorithms in the autonomy stack. This model is initially developed and used in simulation and then tested on a twin vehicle model in reality, to demonstrate the transferability between simulation and reality (also known as Sim2Real).
ART/ATK: A research platform for assessing and mitigating the sim-to-real gap in robotics and autonomous vehicle engineering
Nov 09, 2022We discuss a platform that has both software and hardware components, and whose purpose is to support research into characterizing and mitigating the sim-to-real gap in robotics and vehicle autonomy engineering. The software is operating-system independent and has three main components: a simulation engine called Chrono, which supports high-fidelity vehicle and sensor simulation; an autonomy stack for algorithm design and testing; and a development environment that supports visualization and hardware-in-the-loop experimentation. The accompanying hardware platform is a 1/6th scale vehicle augmented with reconfigurable mountings for computing, sensing, and tracking. Since this vehicle platform has a digital twin within the simulation environment, one can test the same autonomy perception, state estimation, or controls algorithms, as well as the processors they run on, in both simulation and reality. A demonstration is provided to show the utilization of this platform for autonomy research. Future work will concentrate on augmenting ART/ATK with support for a full-sized Chevy Bolt EUV, which will be made available to this group in the immediate future.
Analysis of V2X Sidelink Positioning in sub-6 GHz
Oct 27, 2022



Radio positioning is an important part of joint communication and sensing in beyond 5G communication systems. Existing works mainly focus on the mmWave bands and under-utilize the sub-6 GHz bands, even though it is promising for accurate positioning, especially when the multipath is uncomplicated, and meaningful in several important use cases. In this paper, we analyze V2X sidelink positioning and propose a new performance bound that can predict the positioning performance in the presence of severe multipath. Simulation results using ray-tracing data demonstrate the possibility of sidelink positioning, and the efficacy of the new performance bound and its relation with the complexity of the multipath.
Multi-view consensus CNN for 3D facial landmark placement
Oct 14, 2019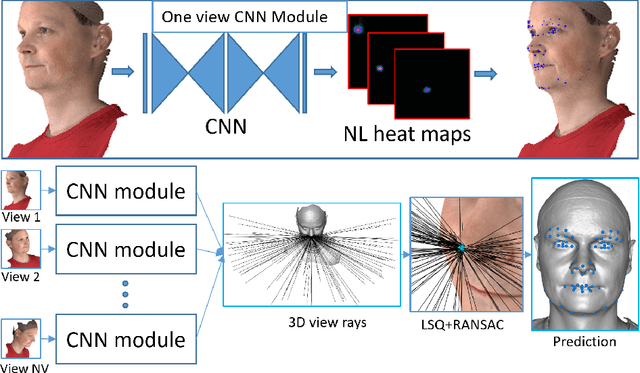
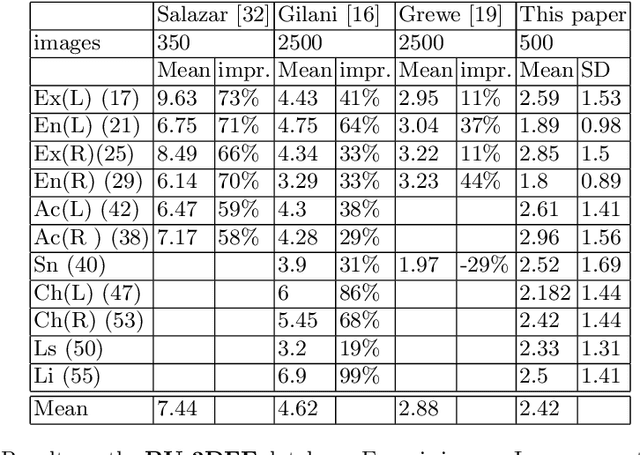
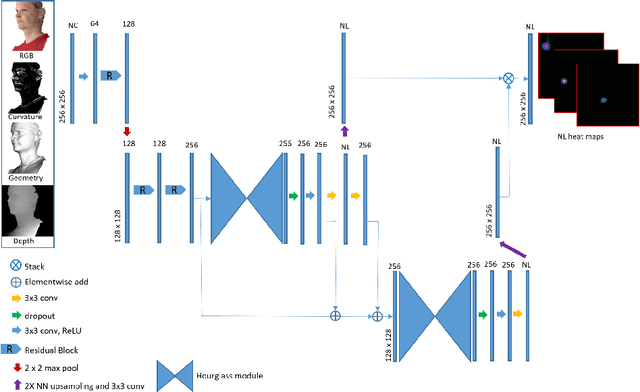
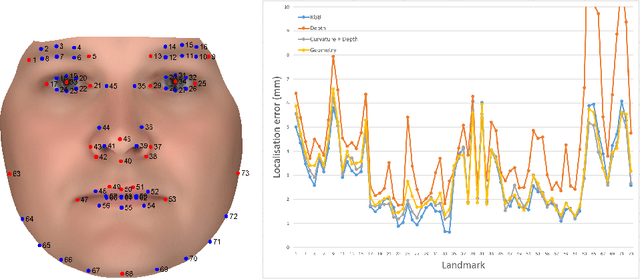
The rapid increase in the availability of accurate 3D scanning devices has moved facial recognition and analysis into the 3D domain. 3D facial landmarks are often used as a simple measure of anatomy and it is crucial to have accurate algorithms for automatic landmark placement. The current state-of-the-art approaches have yet to gain from the dramatic increase in performance reported in human pose tracking and 2D facial landmark placement due to the use of deep convolutional neural networks (CNN). Development of deep learning approaches for 3D meshes has given rise to the new subfield called geometric deep learning, where one topic is the adaptation of meshes for the use of deep CNNs. In this work, we demonstrate how methods derived from geometric deep learning, namely multi-view CNNs, can be combined with recent advances in human pose tracking. The method finds 2D landmark estimates and propagates this information to 3D space, where a consensus method determines the accurate 3D face landmark position. We utilise the method on a standard 3D face dataset and show that it outperforms current methods by a large margin. Further, we demonstrate how models trained on 3D range scans can be used to accurately place anatomical landmarks in magnetic resonance images.
* This is a pre-print of an article published in proceedings of the asian conference on computer vision 2018 (LNCS 11361). The final authenticated version is available online at: https://doi.org/10.1007/978-3-030-20887-5_44