 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing simulation to design an MPC policy for field navigation using GPS sensing
Apr 18, 2023Modeling a robust control system with a precise GPS-based state estimation capability in simulation can be useful in field navigation applications as it allows for testing and validation in a controlled environment. This testing process would enable navigation systems to be developed and optimized in simulation with direct transferability to real-world scenarios. The multi-physics simulation engine Chrono allows for the creation of scenarios that may be difficult or dangerous to replicate in the field, such as extreme weather or terrain conditions. Autonomy Research Testbed (ART), a specialized robotics algorithm testbed, is operated in conjunction with Chrono to develop an MPC control policy as well as an EKF state estimator. This platform enables users to easily integrate custom algorithms in the autonomy stack. This model is initially developed and used in simulation and then tested on a twin vehicle model in reality, to demonstrate the transferability between simulation and reality (also known as Sim2Real).
ART/ATK: A research platform for assessing and mitigating the sim-to-real gap in robotics and autonomous vehicle engineering
Nov 09, 2022We discuss a platform that has both software and hardware components, and whose purpose is to support research into characterizing and mitigating the sim-to-real gap in robotics and vehicle autonomy engineering. The software is operating-system independent and has three main components: a simulation engine called Chrono, which supports high-fidelity vehicle and sensor simulation; an autonomy stack for algorithm design and testing; and a development environment that supports visualization and hardware-in-the-loop experimentation. The accompanying hardware platform is a 1/6th scale vehicle augmented with reconfigurable mountings for computing, sensing, and tracking. Since this vehicle platform has a digital twin within the simulation environment, one can test the same autonomy perception, state estimation, or controls algorithms, as well as the processors they run on, in both simulation and reality. A demonstration is provided to show the utilization of this platform for autonomy research. Future work will concentrate on augmenting ART/ATK with support for a full-sized Chevy Bolt EUV, which will be made available to this group in the immediate future.
A software toolkit and hardware platform for investigating and comparing robot autonomy algorithms in simulation and reality
Jun 14, 2022
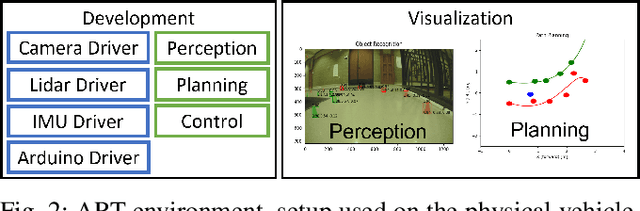
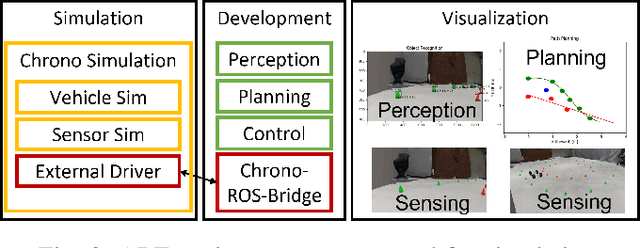
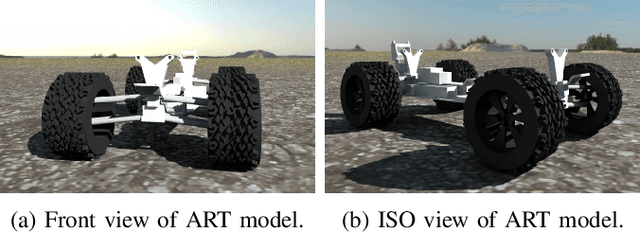
We describe a software framework and a hardware platform used in tandem for the design and analysis of robot autonomy algorithms in simulation and reality. The software, which is open source, containerized, and operating system (OS) independent, has three main components: a ROS 2 interface to a C++ vehicle simulation framework (Chrono), which provides high-fidelity wheeled/tracked vehicle and sensor simulation; a basic ROS 2-based autonomy stack for algorithm design and testing; and, a development ecosystem which enables visualization, and hardware-in-the-loop experimentation in perception, state estimation, path planning, and controls. The accompanying hardware platform is a 1/6th scale vehicle augmented with reconfigurable mountings for computing, sensing, and tracking. Its purpose is to allow algorithms and sensor configurations to be physically tested and improved. Since this vehicle platform has a digital twin within the simulation environment, one can test and compare the same algorithms and autonomy stack in simulation and reality. This platform has been built with an eye towards characterizing and managing the simulation-to-reality gap. Herein, we describe how this platform is set up, deployed, and used to improve autonomy for mobility applications.