 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDoes Pass Rate Tell the Whole Story? Evaluating Design Constraint Compliance in LLM-based Issue Resolution
Apr 07, 2026Repository-level issue resolution benchmarks have become a standard testbed for evaluating LLM-based agents, yet success is still predominantly measured by test pass rates. In practice, however, acceptable patches must also comply with project-specific design constraints, such as architectural conventions, error-handling policies, and maintainability requirements, which are rarely encoded in tests and are often documented only implicitly in code review discussions. This paper introduces \textit{design-aware issue resolution} and presents \bench{}, a benchmark that makes such implicit design constraints explicit and measurable. \bench{} is constructed by mining and validating design constraints from real-world pull requests, linking them to issue instances, and automatically checking patch compliance using an LLM-based verifier, yielding 495 issues and 1,787 validated constraints across six repositories, aligned with SWE-bench-Verified and SWE-bench-Pro. Experiments with state-of-the-art agents show that test-based correctness substantially overestimates patch quality: fewer than half of resolved issues are fully design-satisfying, design violations are widespread, and functional correctness exhibits negligible statistical association with design satisfaction. While providing issue-specific design guidance reduces violations, substantial non-compliance remains, highlighting a fundamental gap in current agent capabilities and motivating design-aware evaluation beyond functional correctness.
ChronoDreamer: Action-Conditioned World Model as an Online Simulator for Robotic Planning
Dec 21, 2025We present ChronoDreamer, an action-conditioned world model for contact-rich robotic manipulation. Given a history of egocentric RGB frames, contact maps, actions, and joint states, ChronoDreamer predicts future video frames, contact distributions, and joint angles via a spatial-temporal transformer trained with MaskGIT-style masked prediction. Contact is encoded as depth-weighted Gaussian splat images that render 3D forces into a camera-aligned format suitable for vision backbones. At inference, predicted rollouts are evaluated by a vision-language model that reasons about collision likelihood, enabling rejection sampling of unsafe actions before execution. We train and evaluate on DreamerBench, a simulation dataset generated with Project Chrono that provides synchronized RGB, contact splat, proprioception, and physics annotations across rigid and deformable object scenarios. Qualitative results demonstrate that the model preserves spatial coherence during non-contact motion and generates plausible contact predictions, while the LLM-based judge distinguishes collision from non-collision trajectories.
An Equivariant Graph Network for Interpretable Nanoporous Materials Design
Sep 19, 2025Nanoporous materials hold promise for diverse sustainable applications, yet their vast chemical space poses challenges for efficient design. Machine learning offers a compelling pathway to accelerate the exploration, but existing models lack either interpretability or fidelity for elucidating the correlation between crystal geometry and property. Here, we report a three-dimensional periodic space sampling method that decomposes large nanoporous structures into local geometrical sites for combined property prediction and site-wise contribution quantification. Trained with a constructed database and retrieved datasets, our model achieves state-of-the-art accuracy and data efficiency for property prediction on gas storage, separation, and electrical conduction. Meanwhile, this approach enables the interpretation of the prediction and allows for accurate identification of significant local sites for targeted properties. Through identifying transferable high-performance sites across diverse nanoporous frameworks, our model paves the way for interpretable, symmetry-aware nanoporous materials design, which is extensible to other materials, like molecular crystals and beyond.
Benchmarking and Enhancing LLM Agents in Localizing Linux Kernel Bugs
May 26, 2025The Linux kernel is a critical system, serving as the foundation for numerous systems. Bugs in the Linux kernel can cause serious consequences, affecting billions of users. Fault localization (FL), which aims at identifying the buggy code elements in software, plays an essential role in software quality assurance. While recent LLM agents have achieved promising accuracy in FL on recent benchmarks like SWE-bench, it remains unclear how well these methods perform in the Linux kernel, where FL is much more challenging due to the large-scale code base, limited observability, and diverse impact factors. In this paper, we introduce LinuxFLBench, a FL benchmark constructed from real-world Linux kernel bugs. We conduct an empirical study to assess the performance of state-of-the-art LLM agents on the Linux kernel. Our initial results reveal that existing agents struggle with this task, achieving a best top-1 accuracy of only 41.6% at file level. To address this challenge, we propose LinuxFL$^+$, an enhancement framework designed to improve FL effectiveness of LLM agents for the Linux kernel. LinuxFL$^+$ substantially improves the FL accuracy of all studied agents (e.g., 7.2% - 11.2% accuracy increase) with minimal costs. Data and code are available at https://github.com/FudanSELab/LinuxFLBench.
A Study on the Use of Simulation in Synthesizing Path-Following Control Policies for Autonomous Ground Robots
Mar 26, 2024We report results obtained and insights gained while answering the following question: how effective is it to use a simulator to establish path following control policies for an autonomous ground robot? While the quality of the simulator conditions the answer to this question, we found that for the simulation platform used herein, producing four control policies for path planning was straightforward once a digital twin of the controlled robot was available. The control policies established in simulation and subsequently demonstrated in the real world are PID control, MPC, and two neural network (NN) based controllers. Training the two NN controllers via imitation learning was accomplished expeditiously using seven simple maneuvers: follow three circles clockwise, follow the same circles counter-clockwise, and drive straight. A test randomization process that employs random micro-simulations is used to rank the ``goodness'' of the four control policies. The policy ranking noted in simulation correlates well with the ranking observed when the control policies were tested in the real world. The simulation platform used is publicly available and BSD3-released as open source; a public Docker image is available for reproducibility studies. It contains a dynamics engine, a sensor simulator, a ROS2 bridge, and a ROS2 autonomy stack the latter employed both in the simulator and the real world experiments.
Quantifying the Sim2real Gap for GPS and IMU Sensors
Mar 16, 2024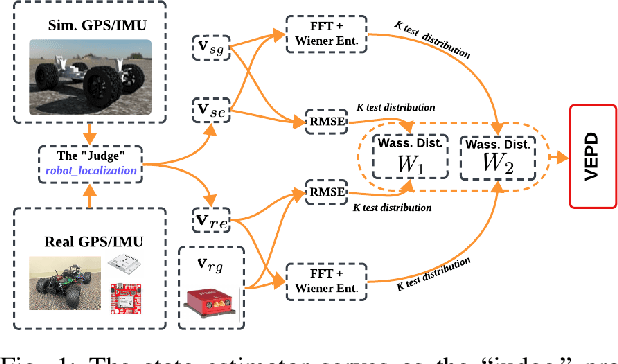
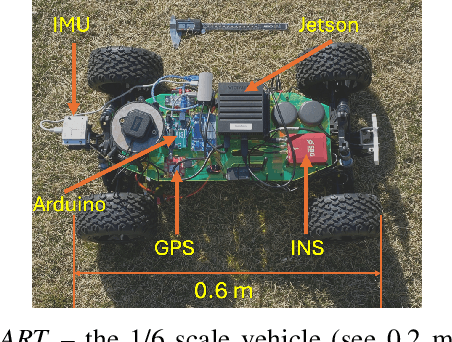
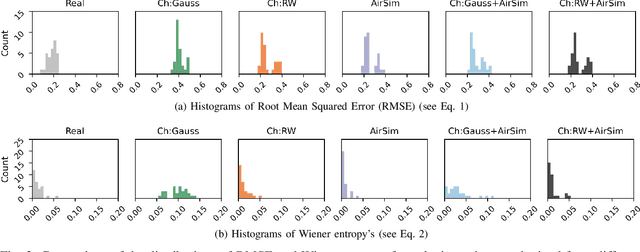
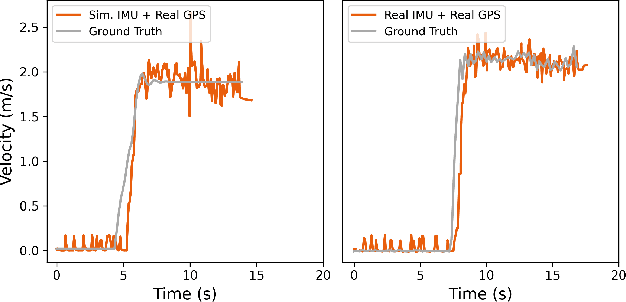
Simulation can and should play a critical role in the development and testing of algorithms for autonomous agents. What might reduce its impact is the ``sim2real'' gap -- the algorithm response differs between operation in simulated versus real-world environments. This paper introduces an approach to evaluate this gap, focusing on the accuracy of sensor simulation -- specifically IMU and GPS -- in velocity estimation tasks for autonomous agents. Using a scaled autonomous vehicle, we conduct 40 real-world experiments across diverse environments then replicate the experiments in simulation with five distinct sensor noise models. We note that direct comparison of raw simulation and real sensor data fails to quantify the sim2real gap for robotics applications. We demonstrate that by using a state of the art state-estimation package as a ``judge'', and by evaluating the performance of this state-estimator in both real and simulated scenarios, we can isolate the sim2real discrepancies stemming from sensor simulations alone. The dataset generated is open-source and publicly available for unfettered use.