 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChicGrasp: Imitation-Learning based Customized Dual-Jaw Gripper Control for Delicate, Irregular Bio-products Manipulation
May 13, 2025Automated poultry processing lines still rely on humans to lift slippery, easily bruised carcasses onto a shackle conveyor. Deformability, anatomical variance, and strict hygiene rules make conventional suction and scripted motions unreliable. We present ChicGrasp, an end--to--end hardware--software co-design for this task. An independently actuated dual-jaw pneumatic gripper clamps both chicken legs, while a conditional diffusion-policy controller, trained from only 50 multi--view teleoperation demonstrations (RGB + proprioception), plans 5 DoF end--effector motion, which includes jaw commands in one shot. On individually presented raw broiler carcasses, our system achieves a 40.6\% grasp--and--lift success rate and completes the pick to shackle cycle in 38 s, whereas state--of--the--art implicit behaviour cloning (IBC) and LSTM-GMM baselines fail entirely. All CAD, code, and datasets will be open-source. ChicGrasp shows that imitation learning can bridge the gap between rigid hardware and variable bio--products, offering a reproducible benchmark and a public dataset for researchers in agricultural engineering and robot learning.
Feedback Regulated Opto-Mechanical Soft Robotic Actuators
Dec 20, 2024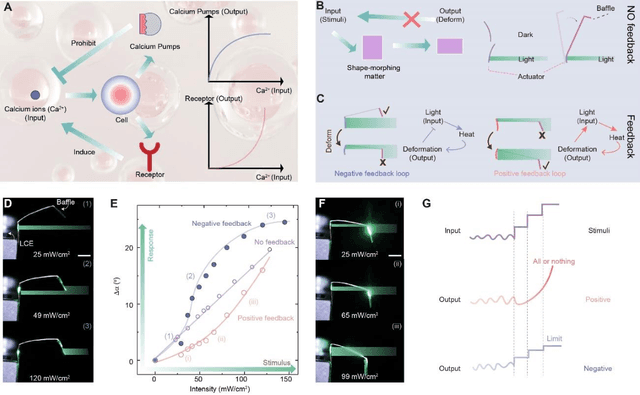
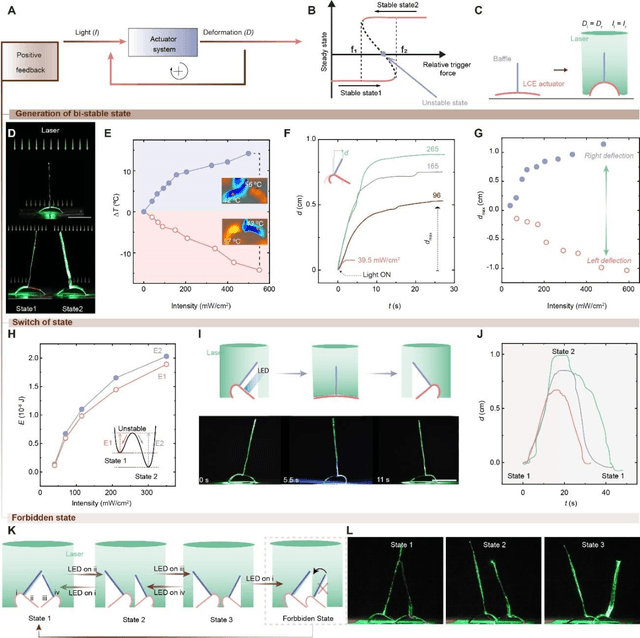
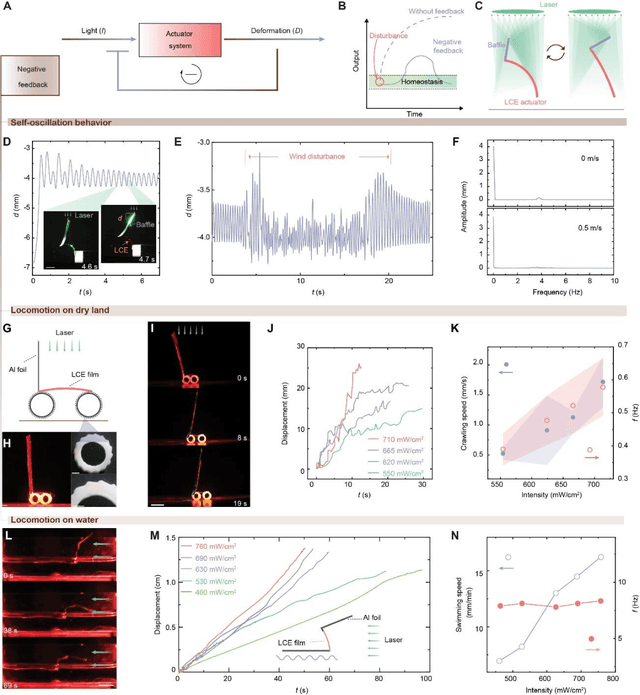
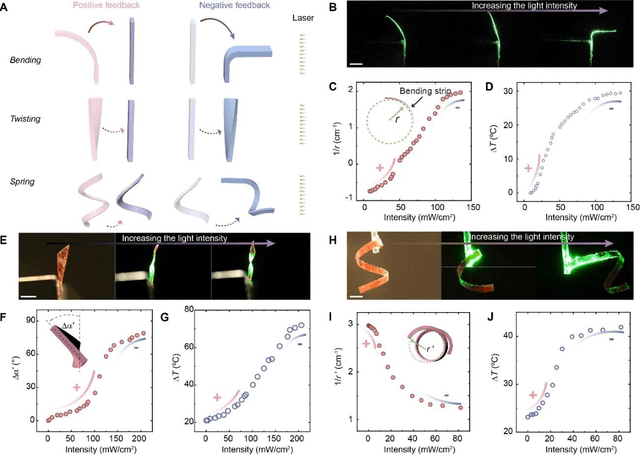
Natural organisms can convert environmental stimuli into sensory feedback to regulate their body and realize active adaptivity. However, realizing such a feedback-regulation mechanism in synthetic material systems remains a grand challenge. It is believed that achieving complex feedback mechanisms in responsive materials will pave the way toward autonomous, intelligent structure and actuation without complex electronics. Inspired by living systems, we report a general principle to design and construct such feedback loops in light-responsive materials. Specifically, we design a baffle-actuator mechanism to incorporate programmed feedback into the opto-mechanical responsiveness. By simply addressing the baffle position with respect to the incident light beam, positive and negative feedback are programmed. We demonstrate the transformation of a light-bending strip into a switcher, where the intensity of light determines the energy barrier under positive feedback, realizing multi-stable shape-morphing. By leveraging the negative feedback and associated homeostasis, we demonstrate two soft robots, i.e., a locomotor and a swimmer. Furthermore, we unveil the ubiquity of feedback in light-responsive materials, which provides new insight into self-regulated robotic matters.
UniT: Unified Tactile Representation for Robot Learning
Aug 12, 2024



UniT is a novel approach to tactile representation learning, using VQVAE to learn a compact latent space and serve as the tactile representation. It uses tactile images obtained from a single simple object to train the representation with transferability and generalizability. This tactile representation can be zero-shot transferred to various downstream tasks, including perception tasks and manipulation policy learning. Our benchmarking on an in-hand 3D pose estimation task shows that UniT outperforms existing visual and tactile representation learning methods. Additionally, UniT's effectiveness in policy learning is demonstrated across three real-world tasks involving diverse manipulated objects and complex robot-object-environment interactions. Through extensive experimentation, UniT is shown to be a simple-to-train, plug-and-play, yet widely effective method for tactile representation learning. For more details, please refer to our open-source repository https://github.com/ZhengtongXu/UniT and the project website https://zhengtongxu.github.io/unifiedtactile.github.io/.
Robot Tape Manipulation for 3D Printing
Jan 17, 20243D printing has enabled various applications using different forms of materials, such as filaments, sheets, and inks. Typically, during 3D printing, feedstocks are transformed into discrete building blocks and placed or deposited in a designated location similar to the manipulation and assembly of discrete objects. However, 3D printing of continuous and flexible tape (with the geometry between filaments and sheets) without breaking or transformation remains underexplored and challenging. Here, we report the design and implementation of a customized end-effector, i.e., tape print module (TPM), to realize robot tape manipulation for 3D printing by leveraging the tension formed on the tape between two endpoints. We showcase the feasibility of manufacturing representative 2D and 3D structures while utilizing conductive copper tape for various electronic applications, such as circuits and sensors. We believe this manipulation strategy could unlock the potential of other tape materials for manufacturing, including packaging tape and carbon fiber prepreg tape, and inspire new mechanisms for robot manipulation, 3D printing, and packaging.
Computational Discovery of Microstructured Composites with Optimal Strength-Toughness Trade-Offs
Feb 01, 2023The conflict between strength and toughness is a fundamental problem in engineering materials design. However, systematic discovery of microstructured composites with optimal strength-toughness trade-offs has never been demonstrated due to the discrepancies between simulation and reality and the lack of data-efficient exploration of the entire Pareto front. Here, we report a widely applicable pipeline harnessing physical experiments, numerical simulations, and artificial neural networks to efficiently discover microstructured designs that are simultaneously tough and strong. Using a physics-based simulator with moderate complexity, our strategy runs a data-driven proposal-validation workflow in a nested-loop fashion to bridge the gap between simulation and reality in high sample efficiency. Without any prescribed expert knowledge of materials design, our approach automatically identifies existing toughness enhancement mechanisms that were traditionally discovered through trial-and-error or biomimicry. We provide a blueprint for the computational discovery of optimal designs, which inverts traditional scientific approaches, and is applicable to a wide range of research problems beyond composites, including polymer chemistry, fluid dynamics, meteorology, and robotics.
Designing Composites with Target Effective Young's Modulus using Reinforcement Learning
Oct 07, 2021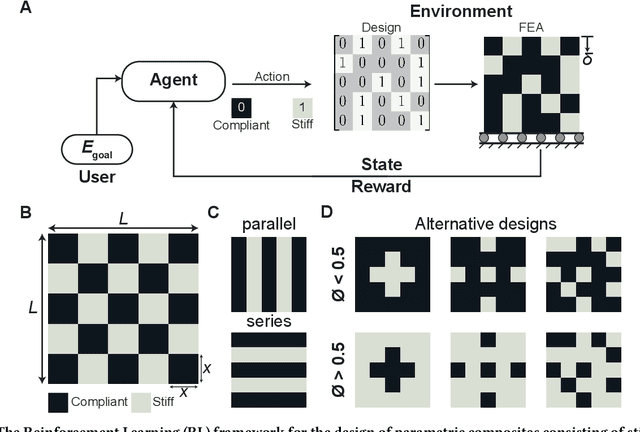
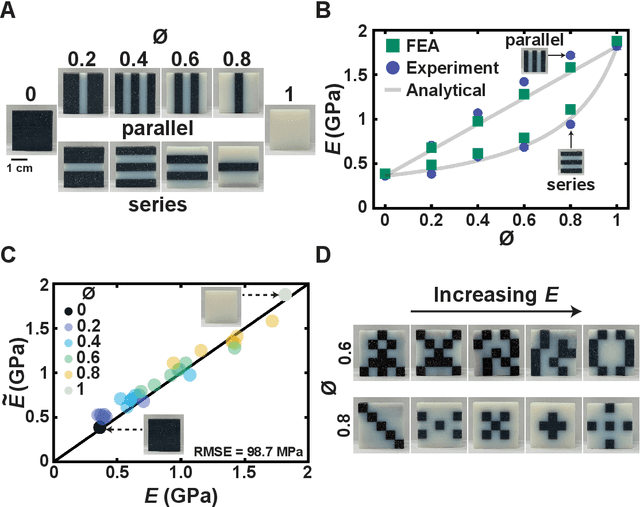
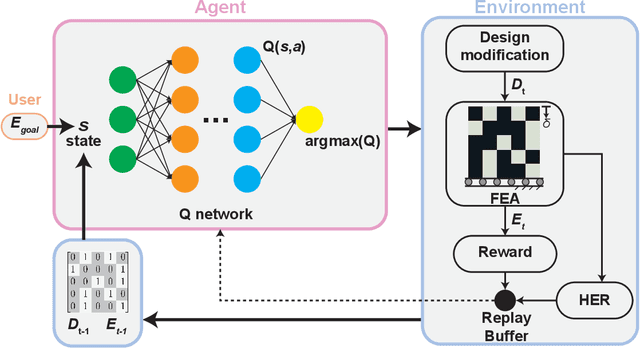

Advancements in additive manufacturing have enabled design and fabrication of materials and structures not previously realizable. In particular, the design space of composite materials and structures has vastly expanded, and the resulting size and complexity has challenged traditional design methodologies, such as brute force exploration and one factor at a time (OFAT) exploration, to find optimum or tailored designs. To address this challenge, supervised machine learning approaches have emerged to model the design space using curated training data; however, the selection of the training data is often determined by the user. In this work, we develop and utilize a Reinforcement learning (RL)-based framework for the design of composite structures which avoids the need for user-selected training data. For a 5 $\times$ 5 composite design space comprised of soft and compliant blocks of constituent material, we find that using this approach, the model can be trained using 2.78% of the total design space consists of $2^{25}$ design possibilities. Additionally, the developed RL-based framework is capable of finding designs at a success rate exceeding 90%. The success of this approach motivates future learning frameworks to utilize RL for the design of composites and other material systems.
Dynamic Modeling of Hand-Object Interactions via Tactile Sensing
Sep 09, 2021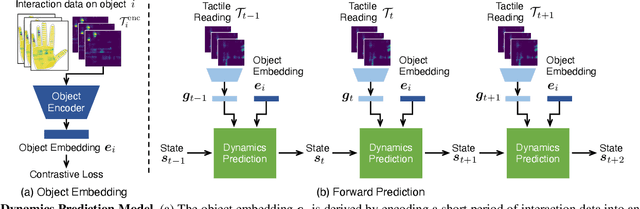
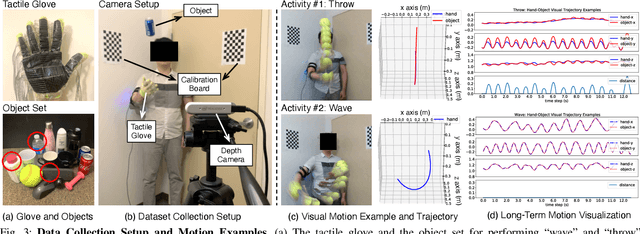
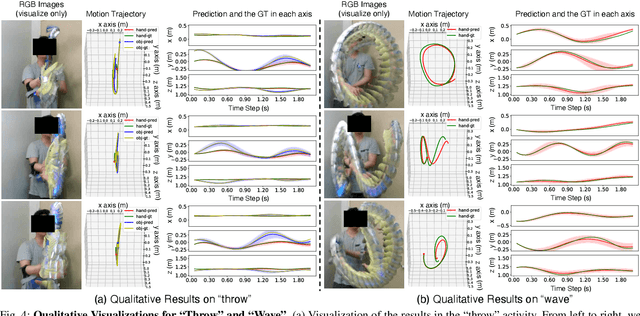
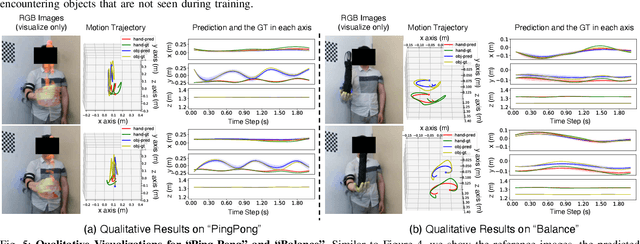
Tactile sensing is critical for humans to perform everyday tasks. While significant progress has been made in analyzing object grasping from vision, it remains unclear how we can utilize tactile sensing to reason about and model the dynamics of hand-object interactions. In this work, we employ a high-resolution tactile glove to perform four different interactive activities on a diversified set of objects. We build our model on a cross-modal learning framework and generate the labels using a visual processing pipeline to supervise the tactile model, which can then be used on its own during the test time. The tactile model aims to predict the 3d locations of both the hand and the object purely from the touch data by combining a predictive model and a contrastive learning module. This framework can reason about the interaction patterns from the tactile data, hallucinate the changes in the environment, estimate the uncertainty of the prediction, and generalize to unseen objects. We also provide detailed ablation studies regarding different system designs as well as visualizations of the predicted trajectories. This work takes a step on dynamics modeling in hand-object interactions from dense tactile sensing, which opens the door for future applications in activity learning, human-computer interactions, and imitation learning for robotics.
Polygrammar: Grammar for Digital Polymer Representation and Generation
May 05, 2021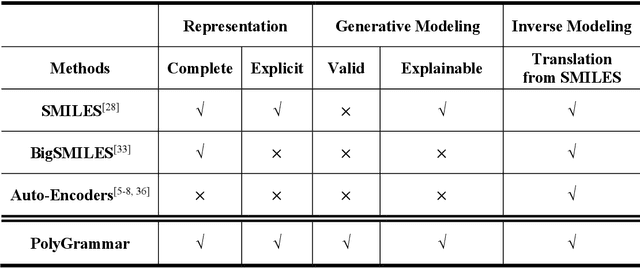
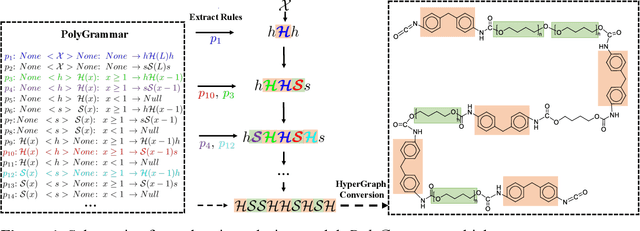
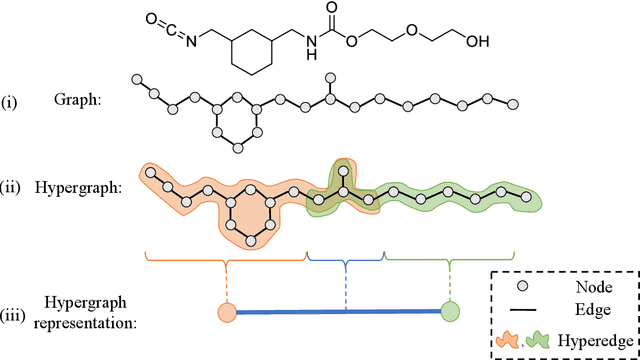
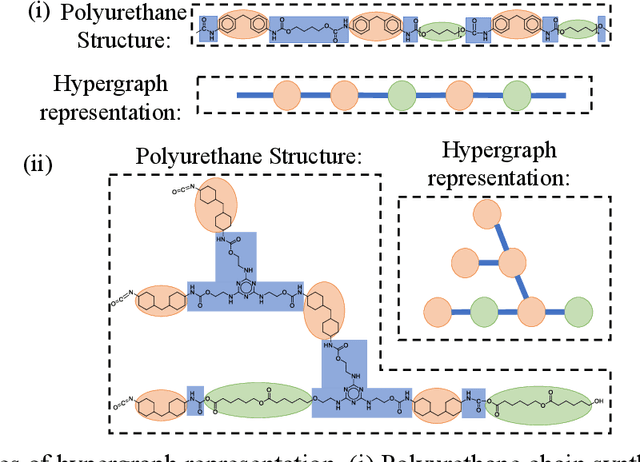
Polymers are widely-studied materials with diverse properties and applications determined by different molecular structures. It is essential to represent these structures clearly and explore the full space of achievable chemical designs. However, existing approaches are unable to offer comprehensive design models for polymers because of their inherent scale and structural complexity. Here, we present a parametric, context-sensitive grammar designed specifically for the representation and generation of polymers. As a demonstrative example, we implement our grammar for polyurethanes. Using our symbolic hypergraph representation and 14 simple production rules, our PolyGrammar is able to represent and generate all valid polyurethane structures. We also present an algorithm to translate any polyurethane structure from the popular SMILES string format into our PolyGrammar representation. We test the representative power of PolyGrammar by translating a dataset of over 600 polyurethane samples collected from literature. Furthermore, we show that PolyGrammar can be easily extended to the other copolymers and homopolymers such as polyacrylates. By offering a complete, explicit representation scheme and an explainable generative model with validity guarantees, our PolyGrammar takes an important step toward a more comprehensive and practical system for polymer discovery and exploration. As the first bridge between formal languages and chemistry, PolyGrammar also serves as a critical blueprint to inform the design of similar grammars for other chemistries, including organic and inorganic molecules.