 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFacial Affect Recognition based on Multi Architecture Encoder and Feature Fusion for the ABAW7 Challenge
Jul 17, 2024

In this paper, we present our approach to addressing the challenges of the 7th ABAW competition. The competition comprises three sub-challenges: Valence Arousal (VA) estimation, Expression (Expr) classification, and Action Unit (AU) detection. To tackle these challenges, we employ state-of-the-art models to extract powerful visual features. Subsequently, a Transformer Encoder is utilized to integrate these features for the VA, Expr, and AU sub-challenges. To mitigate the impact of varying feature dimensions, we introduce an affine module to align the features to a common dimension. Overall, our results significantly outperform the baselines.
Parallel Proportional Fusion of Spiking Quantum Neural Network for Optimizing Image Classification
Apr 01, 2024



The recent emergence of the hybrid quantum-classical neural network (HQCNN) architecture has garnered considerable attention due to the potential advantages associated with integrating quantum principles to enhance various facets of machine learning algorithms and computations. However, the current investigated serial structure of HQCNN, wherein information sequentially passes from one network to another, often imposes limitations on the trainability and expressivity of the network. In this study, we introduce a novel architecture termed Parallel Proportional Fusion of Quantum and Spiking Neural Networks (PPF-QSNN). The dataset information is simultaneously fed into both the spiking neural network and the variational quantum circuits, with the outputs amalgamated in proportion to their individual contributions. We systematically assess the impact of diverse PPF-QSNN parameters on network performance for image classification, aiming to identify the optimal configuration. Numerical results on the MNIST dataset unequivocally illustrate that our proposed PPF-QSNN outperforms both the existing spiking neural network and the serial quantum neural network across metrics such as accuracy, loss, and robustness. This study introduces a novel and effective amalgamation approach for HQCNN, thereby laying the groundwork for the advancement and application of quantum advantage in artificial intelligent computations.
Numerical Energy Analysis of In-wheel Motor Driven Autonomous Electric Vehicles
Apr 10, 2021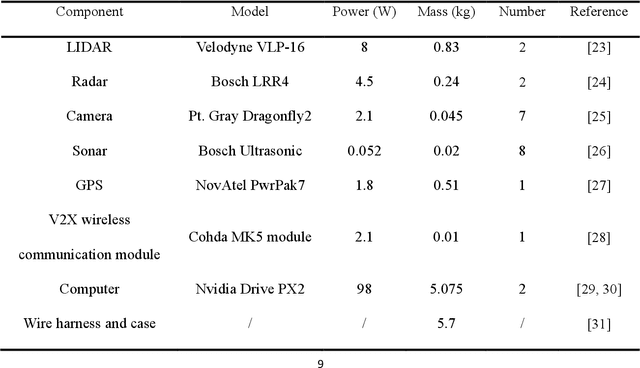
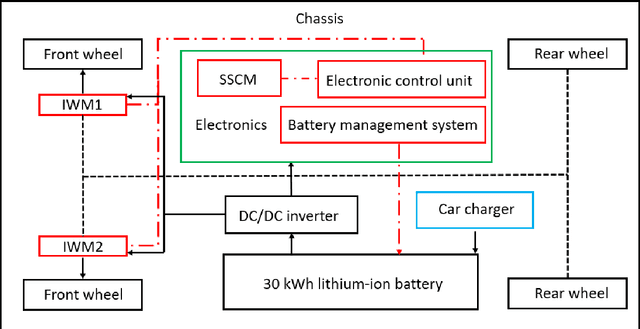
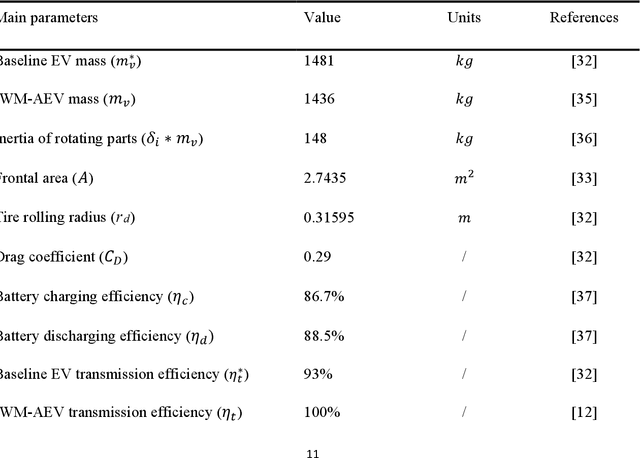
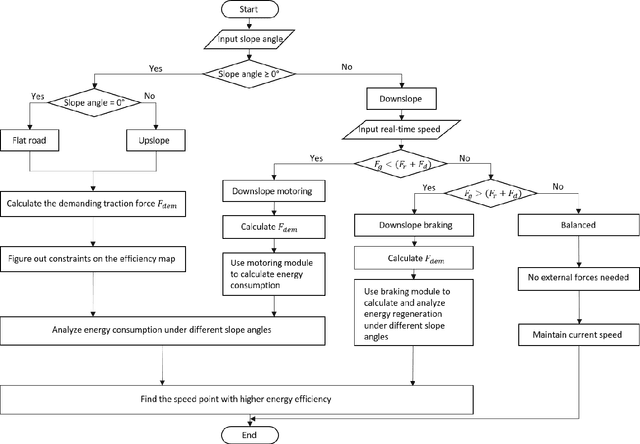
Autonomous electric vehicles are being widely studied nowadays as the future technology of ground transportation, while the autonomous electric vehicles based on conventional powertrain system limit their energy and power transmission efficiencies and may hinder their broad applications in future. Here we report a study on the energy consumption and efficiency improvement of a mid-size autonomous electric vehicle driven by in-wheel motors, through the development of a numerical energy model, validated with the actual driving data and implemented in a case study. The energy analysis was conducted under three driving conditions: flat road, upslope, and downslope driving to examine the energy consumption, with the energy-saving potential of the in-wheel-motor driven powertrain system systematically explored and discussed. Considering the energy recovery from the regenerative braking, energy consumption and regenerated energy were calculated in specific driving cycles based on vehicle dynamics and autonomous driving patterns. A case study was conducted using the baseline electric vehicle driving data in West Los Angeles. It was found that an in-wheel motor driven autonomous electric vehicle can save up to 17.5% of energy compared with a conventional electric vehicle during the slope driving. Using the efficiency maps of a commercial in-wheel motor, the numerical energy model and validated results obtained from this study are in line with actual situations, and can be used to support sustainable development of more energy-efficient autonomous electric vehicles in the future.