 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNumerical Energy Analysis of In-wheel Motor Driven Autonomous Electric Vehicles
Apr 10, 2021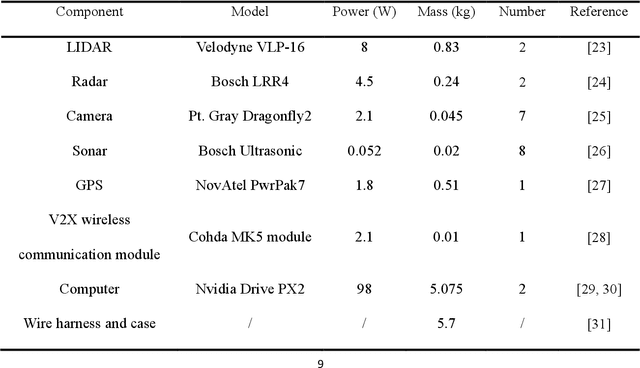
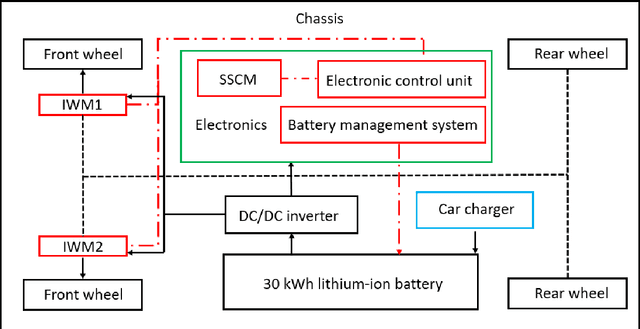
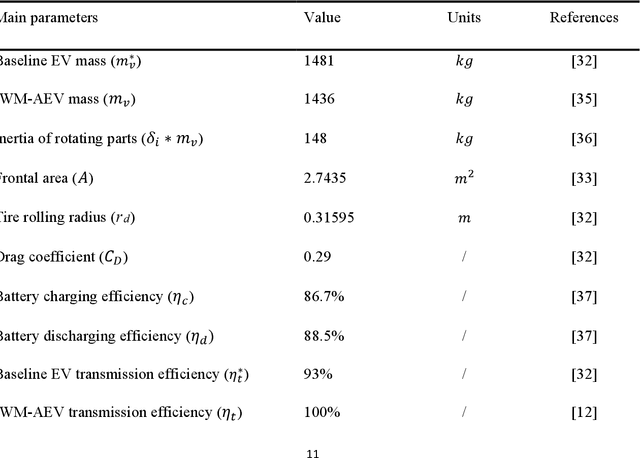
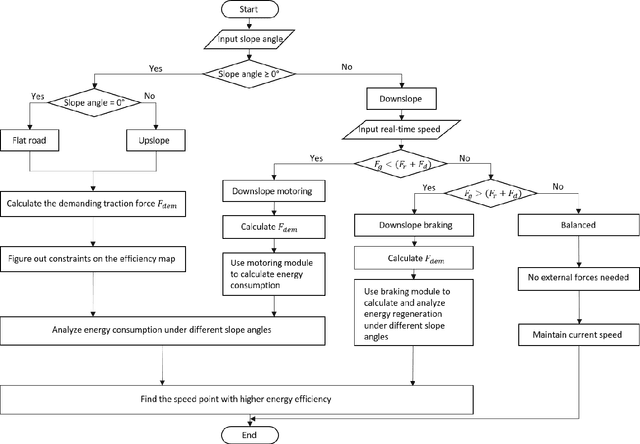
Autonomous electric vehicles are being widely studied nowadays as the future technology of ground transportation, while the autonomous electric vehicles based on conventional powertrain system limit their energy and power transmission efficiencies and may hinder their broad applications in future. Here we report a study on the energy consumption and efficiency improvement of a mid-size autonomous electric vehicle driven by in-wheel motors, through the development of a numerical energy model, validated with the actual driving data and implemented in a case study. The energy analysis was conducted under three driving conditions: flat road, upslope, and downslope driving to examine the energy consumption, with the energy-saving potential of the in-wheel-motor driven powertrain system systematically explored and discussed. Considering the energy recovery from the regenerative braking, energy consumption and regenerated energy were calculated in specific driving cycles based on vehicle dynamics and autonomous driving patterns. A case study was conducted using the baseline electric vehicle driving data in West Los Angeles. It was found that an in-wheel motor driven autonomous electric vehicle can save up to 17.5% of energy compared with a conventional electric vehicle during the slope driving. Using the efficiency maps of a commercial in-wheel motor, the numerical energy model and validated results obtained from this study are in line with actual situations, and can be used to support sustainable development of more energy-efficient autonomous electric vehicles in the future.