 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWatchGuardian: Enabling User-Defined Personalized Just-in-Time Intervention on Smartwatch
Feb 09, 2025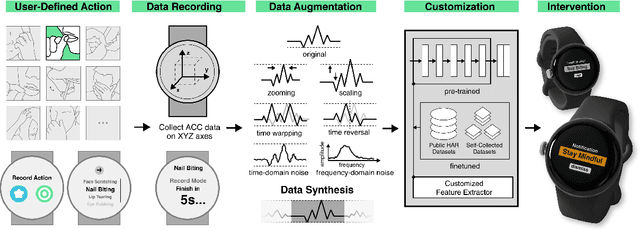
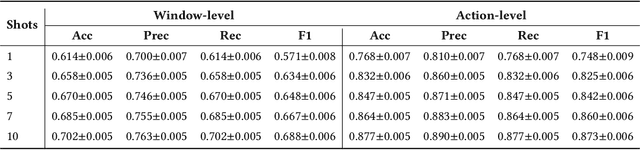
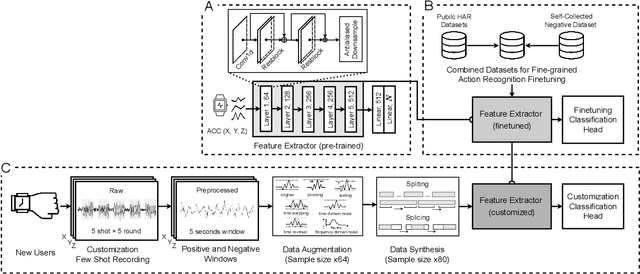
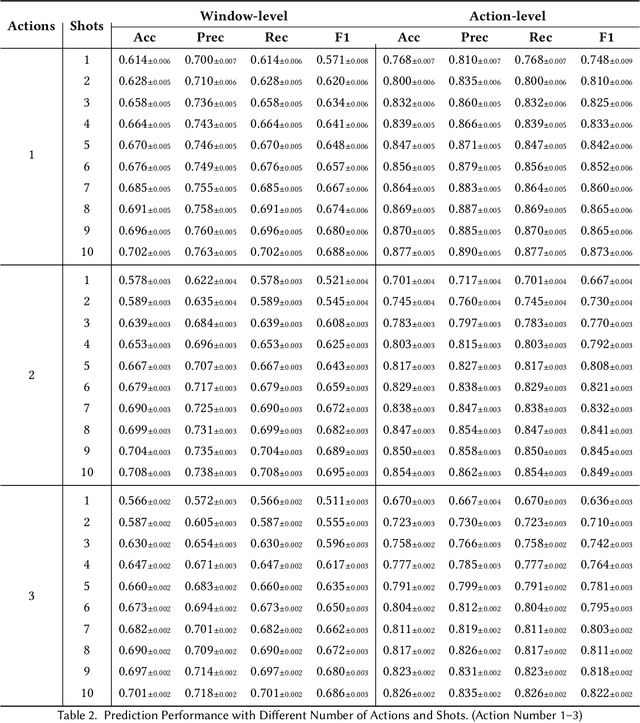
While just-in-time interventions (JITIs) have effectively targeted common health behaviors, individuals often have unique needs to intervene in personal undesirable actions that can negatively affect physical, mental, and social well-being. We present WatchGuardian, a smartwatch-based JITI system that empowers users to define custom interventions for these personal actions with a small number of samples. For the model to detect new actions based on limited new data samples, we developed a few-shot learning pipeline that finetuned a pre-trained inertial measurement unit (IMU) model on public hand-gesture datasets. We then designed a data augmentation and synthesis process to train additional classification layers for customization. Our offline evaluation with 26 participants showed that with three, five, and ten examples, our approach achieved an average accuracy of 76.8%, 84.7%, and 87.7%, and an F1 score of 74.8%, 84.2%, and 87.2% We then conducted a four-hour intervention study to compare WatchGuardian against a rule-based intervention. Our results demonstrated that our system led to a significant reduction by 64.0 +- 22.6% in undesirable actions, substantially outperforming the baseline by 29.0%. Our findings underscore the effectiveness of a customizable, AI-driven JITI system for individuals in need of behavioral intervention in personal undesirable actions. We envision that our work can inspire broader applications of user-defined personalized intervention with advanced AI solutions.
Enable Natural Tactile Interaction for Robot Dog based on Large-format Distributed Flexible Pressure Sensors
Mar 14, 2023



Touch is an important channel for human-robot interaction, while it is challenging for robots to recognize human touch accurately and make appropriate responses. In this paper, we design and implement a set of large-format distributed flexible pressure sensors on a robot dog to enable natural human-robot tactile interaction. Through a heuristic study, we sorted out 81 tactile gestures commonly used when humans interact with real dogs and 44 dog reactions. A gesture classification algorithm based on ResNet is proposed to recognize these 81 human gestures, and the classification accuracy reaches 98.7%. In addition, an action prediction algorithm based on Transformer is proposed to predict dog actions from human gestures, reaching a 1-gram BLEU score of 0.87. Finally, we compare the tactile interaction with the voice interaction during a freedom human-robot-dog interactive playing study. The results show that tactile interaction plays a more significant role in alleviating user anxiety, stimulating user excitement and improving the acceptability of robot dogs.
* 7 pages, 5 figures