 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Reactive Dexterous Grasping via Hierarchical Task-Space RL Planning and Joint-Space QP Control
May 05, 2026In this work, we propose a hybrid hierarchical control framework for reactive dexterous grasping that explicitly decouples high-level spatial intent from low-level joint execution. We introduce a multi-agent reinforcement learning architecture, specialized into distinct arm and hand agents, that acts as a high-level planner by generating desired task-space velocity commands. These commands are then processed by a GPU-parallelized quadratic programming controller, which translates them into feasible joint velocities while strictly enforcing kinematic limits and collision avoidance. This structural isolation not only accelerates training convergence but also strictly enforces hardware safety. Furthermore, the architecture unlocks zero-shot steerability, allowing system operators to dynamically adjust safety margins and avoid dynamic obstacles without retraining the policy. We extensively validate the proposed framework through a rigorous simulation-to-reality pipeline. Real-world hardware experiments on a 7-DoF arm equipped with a 20-DoF anthropomorphic hand demonstrate highly robust zero-shot transferability for dexterous grasping to a diverse set of unseen objects, highlighting the system's ability to reactively recover from unexpected physical disturbances in unstructured environments.
Point2Pose: Occlusion-Recovering 6D Pose Tracking and 3D Reconstruction for Multiple Unknown Objects Via 2D Point Trackers
Apr 12, 2026We present Point2Pose, a model-free method for causal 6D pose tracking of multiple rigid objects from monocular RGB-D video. Initialized only from sparse image points on the objects to be tracked, our approach tracks multiple unseen objects without requiring object CAD models or category priors. Point2Pose leverages a 2D point tracker to obtain long-range correspondences, enabling instant recovery after complete occlusion. Simultaneously, the system incrementally reconstructs an online Truncated Signed Distance Function (TSDF) representation of the tracked targets. Alongside the method, we introduce a new multi-object tracking dataset comprising both simulation and real-world sequences, with motion-capture ground truth for evaluation. Experiments show that Point2Pose achieves performance comparable to the state-of-the-art methods on a severe-occlusion benchmark, while additionally supporting multi-object tracking and recovery from complete occlusion, capabilities that are not supported by previous model-free tracking approaches.
System Design of the Ultra Mobility Vehicle: A Driving, Balancing, and Jumping Bicycle Robot
Feb 25, 2026Trials cyclists and mountain bike riders can hop, jump, balance, and drive on one or both wheels. This versatility allows them to achieve speed and energy-efficiency on smooth terrain and agility over rough terrain. Inspired by these athletes, we present the design and control of a robotic platform, Ultra Mobility Vehicle (UMV), which combines a bicycle and a reaction mass to move dynamically with minimal actuated degrees of freedom. We employ a simulation-driven design optimization process to synthesize a spatial linkage topology with a focus on vertical jump height and momentum-based balancing on a single wheel contact. Using a constrained Reinforcement Learning (RL) framework, we demonstrate zero-shot transfer of diverse athletic behaviors, including track-stands, jumps, wheelies, rear wheel hopping, and front flips. This 23.5 kg robot is capable of high speeds (8 m/s) and jumping on and over large obstacles (1 m tall, or 130% of the robot's nominal height).
Residual MPC: Blending Reinforcement Learning with GPU-Parallelized Model Predictive Control
Oct 14, 2025



Model Predictive Control (MPC) provides interpretable, tunable locomotion controllers grounded in physical models, but its robustness depends on frequent replanning and is limited by model mismatch and real-time computational constraints. Reinforcement Learning (RL), by contrast, can produce highly robust behaviors through stochastic training but often lacks interpretability, suffers from out-of-distribution failures, and requires intensive reward engineering. This work presents a GPU-parallelized residual architecture that tightly integrates MPC and RL by blending their outputs at the torque-control level. We develop a kinodynamic whole-body MPC formulation evaluated across thousands of agents in parallel at 100 Hz for RL training. The residual policy learns to make targeted corrections to the MPC outputs, combining the interpretability and constraint handling of model-based control with the adaptability of RL. The model-based control prior acts as a strong bias, initializing and guiding the policy towards desirable behavior with a simple set of rewards. Compared to standalone MPC or end-to-end RL, our approach achieves higher sample efficiency, converges to greater asymptotic rewards, expands the range of trackable velocity commands, and enables zero-shot adaptation to unseen gaits and uneven terrain.
High-Bandwidth Tactile-Reactive Control for Grasp Adjustment
Sep 19, 2025Vision-only grasping systems are fundamentally constrained by calibration errors, sensor noise, and grasp pose prediction inaccuracies, leading to unavoidable contact uncertainty in the final stage of grasping. High-bandwidth tactile feedback, when paired with a well-designed tactile-reactive controller, can significantly improve robustness in the presence of perception errors. This paper contributes to controller design by proposing a purely tactile-feedback grasp-adjustment algorithm. The proposed controller requires neither prior knowledge of the object's geometry nor an accurate grasp pose, and is capable of refining a grasp even when starting from a crude, imprecise initial configuration and uncertain contact points. Through simulation studies and real-world experiments on a 15-DoF arm-hand system (featuring an 8-DoF hand) equipped with fingertip tactile sensors operating at 200 Hz, we demonstrate that our tactile-reactive grasping framework effectively improves grasp stability.
High Speed Robotic Table Tennis Swinging Using Lightweight Hardware with Model Predictive Control
May 02, 2025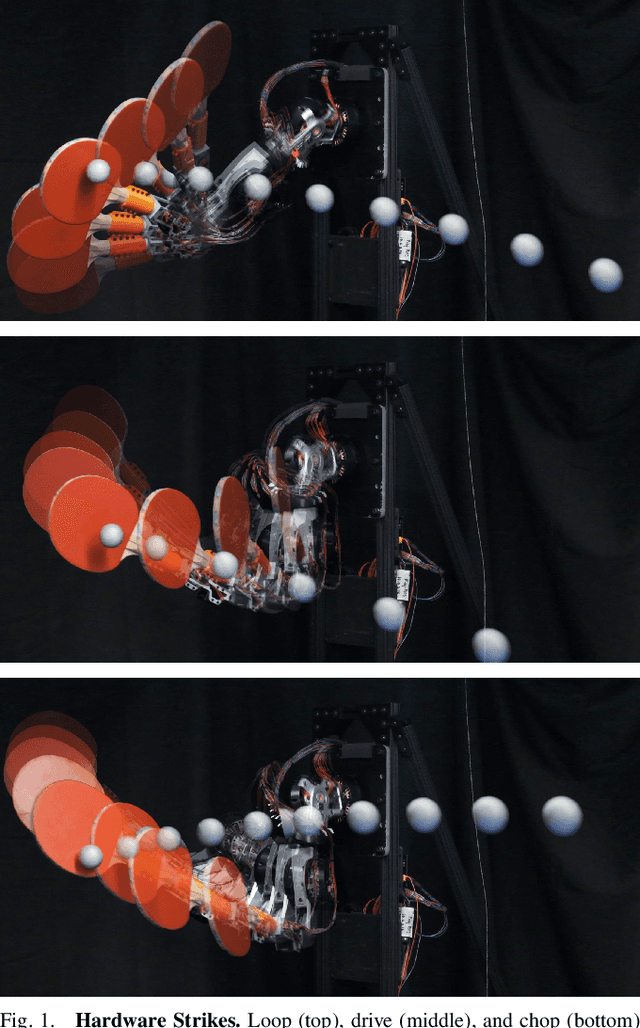
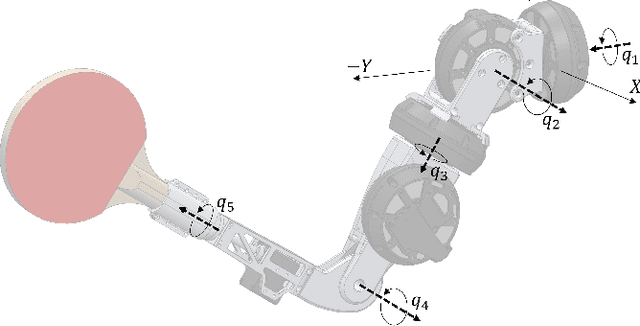
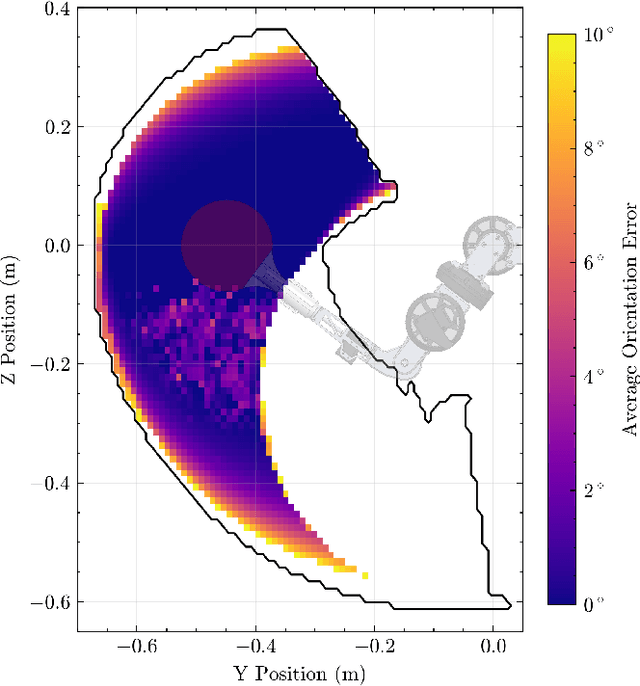
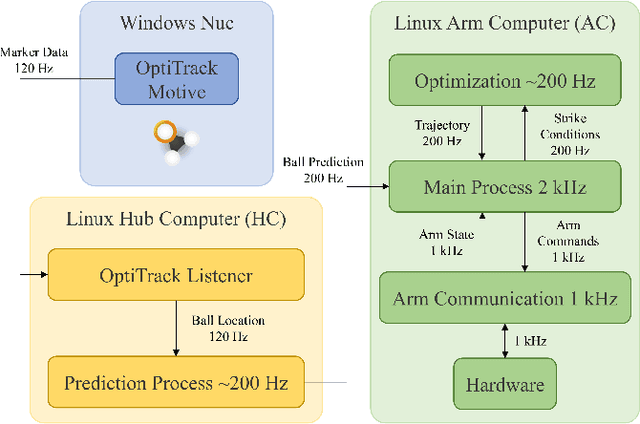
We present a robotic table tennis platform that achieves a variety of hit styles and ball-spins with high precision, power, and consistency. This is enabled by a custom lightweight, high-torque, low rotor inertia, five degree-of-freedom arm capable of high acceleration. To generate swing trajectories, we formulate an optimal control problem (OCP) that constrains the state of the paddle at the time of the strike. The terminal position is given by a predicted ball trajectory, and the terminal orientation and velocity of the paddle are chosen to match various possible styles of hits: loops (topspin), drives (flat), and chops (backspin). Finally, we construct a fixed-horizon model predictive controller (MPC) around this OCP to allow the hardware to quickly react to changes in the predicted ball trajectory. We validate on hardware that the system is capable of hitting balls with an average exit velocity of 11 m/s at an 88% success rate across the three swing types.
URDF+: An Enhanced URDF for Robots with Kinematic Loops
Nov 29, 2024



Designs incorporating kinematic loops are becoming increasingly prevalent in the robotics community. Despite the existence of dynamics algorithms to deal with the effects of such loops, many modern simulators rely on dynamics libraries that require robots to be represented as kinematic trees. This requirement is reflected in the de facto standard format for describing robots, the Universal Robot Description Format (URDF), which does not support kinematic loops resulting in closed chains. This paper introduces an enhanced URDF, termed URDF+, which addresses this key shortcoming of URDF while retaining the intuitive design philosophy and low barrier to entry that the robotics community values. The URDF+ keeps the elements used by URDF to describe open chains and incorporates new elements to encode loop joints. We also offer an accompanying parser that processes the system models coming from URDF+ so that they can be used with recursive rigid-body dynamics algorithms for closed-chain systems that group bodies into local, decoupled loops. This parsing process is fully automated, ensuring optimal grouping of constrained bodies without requiring manual specification from the user. We aim to advance the robotics community towards this elegant solution by developing efficient and easy-to-use software tools.
Probabilistic Homotopy Optimization for Dynamic Motion Planning
Aug 22, 2024We present a homotopic approach to solving challenging, optimization-based motion planning problems. The approach uses Homotopy Optimization, which, unlike standard continuation methods for solving homotopy problems, solves a sequence of constrained optimization problems rather than a sequence of nonlinear systems of equations. The insight behind our proposed algorithm is formulating the discovery of this sequence of optimization problems as a search problem in a multidimensional homotopy parameter space. Our proposed algorithm, the Probabilistic Homotopy Optimization algorithm, switches between solve and sample phases, using solutions to easy problems as initial guesses to more challenging problems. We analyze how our algorithm performs in the presence of common challenges to homotopy methods, such as bifurcation, folding, and disconnectedness of the homotopy solution manifold. Finally, we demonstrate its utility via a case study on two dynamic motion planning problems: the cart-pole and the MIT Humanoid.
CusADi: A GPU Parallelization Framework for Symbolic Expressions and Optimal Control
Aug 19, 2024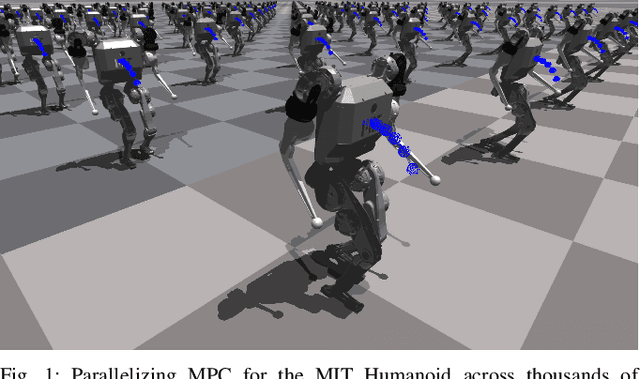
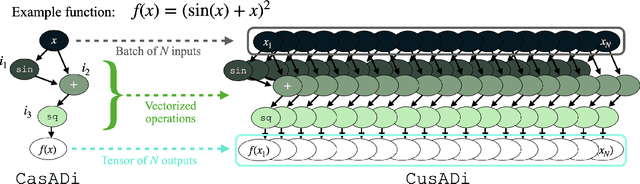
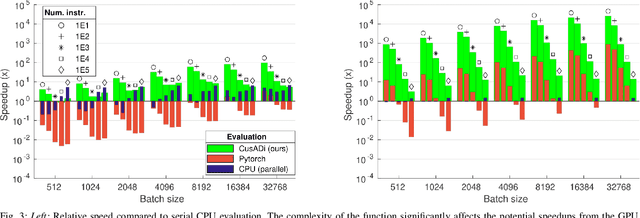
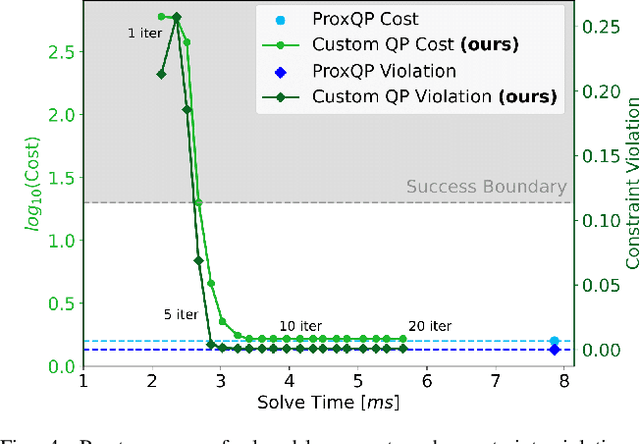
The parallelism afforded by GPUs presents significant advantages in training controllers through reinforcement learning (RL). However, integrating model-based optimization into this process remains challenging due to the complexity of formulating and solving optimization problems across thousands of instances. In this work, we present CusADi, an extension of the CasADi symbolic framework to support the parallelization of arbitrary closed-form expressions on GPUs with CUDA. We also formulate a closed-form approximation for solving general optimal control problems, enabling large-scale parallelization and evaluation of MPC controllers. Our results show a ten-fold speedup relative to similar MPC implementation on the CPU, and we demonstrate the use of CusADi for various applications, including parallel simulation, parameter sweeps, and policy training.
Integrating Model-Based Footstep Planning with Model-Free Reinforcement Learning for Dynamic Legged Locomotion
Aug 05, 2024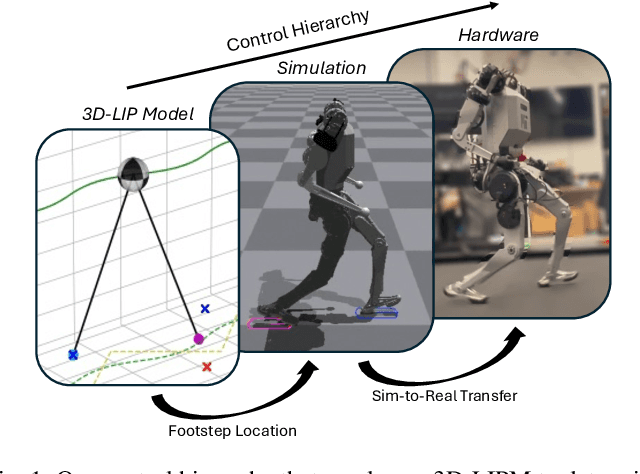
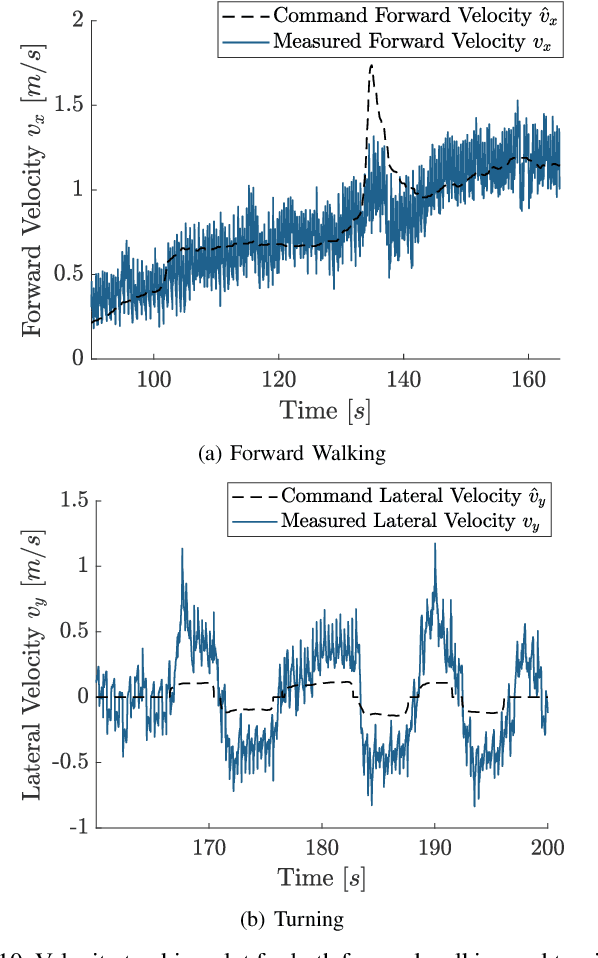
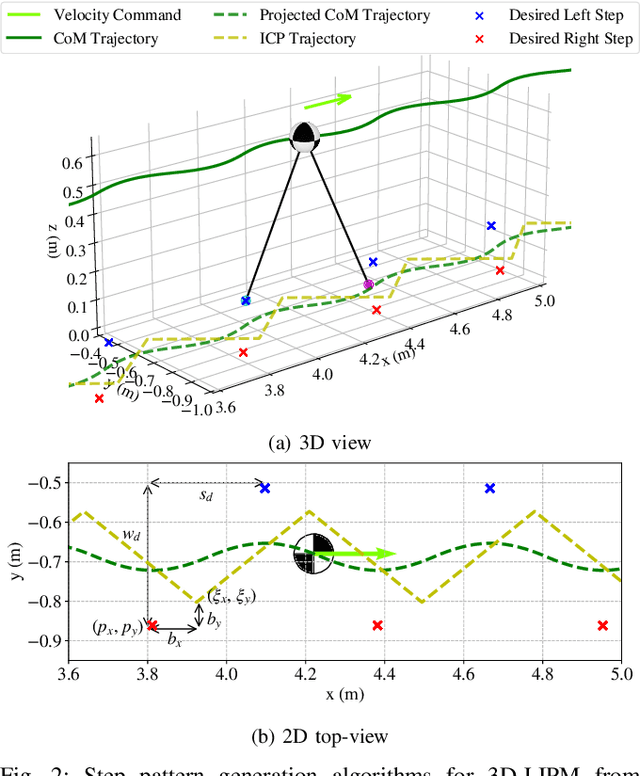
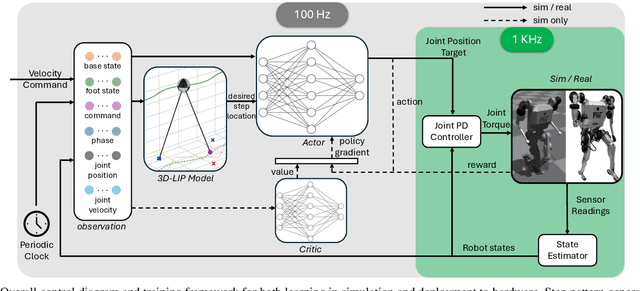
In this work, we introduce a control framework that combines model-based footstep planning with Reinforcement Learning (RL), leveraging desired footstep patterns derived from the Linear Inverted Pendulum (LIP) dynamics. Utilizing the LIP model, our method forward predicts robot states and determines the desired foot placement given the velocity commands. We then train an RL policy to track the foot placements without following the full reference motions derived from the LIP model. This partial guidance from the physics model allows the RL policy to integrate the predictive capabilities of the physics-informed dynamics and the adaptability characteristics of the RL controller without overfitting the policy to the template model. Our approach is validated on the MIT Humanoid, demonstrating that our policy can achieve stable yet dynamic locomotion for walking and turning. We further validate the adaptability and generalizability of our policy by extending the locomotion task to unseen, uneven terrain. During the hardware deployment, we have achieved forward walking speeds of up to 1.5 m/s on a treadmill and have successfully performed dynamic locomotion maneuvers such as 90-degree and 180-degree turns.