 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResidual MPC: Blending Reinforcement Learning with GPU-Parallelized Model Predictive Control
Oct 14, 2025Model Predictive Control (MPC) provides interpretable, tunable locomotion controllers grounded in physical models, but its robustness depends on frequent replanning and is limited by model mismatch and real-time computational constraints. Reinforcement Learning (RL), by contrast, can produce highly robust behaviors through stochastic training but often lacks interpretability, suffers from out-of-distribution failures, and requires intensive reward engineering. This work presents a GPU-parallelized residual architecture that tightly integrates MPC and RL by blending their outputs at the torque-control level. We develop a kinodynamic whole-body MPC formulation evaluated across thousands of agents in parallel at 100 Hz for RL training. The residual policy learns to make targeted corrections to the MPC outputs, combining the interpretability and constraint handling of model-based control with the adaptability of RL. The model-based control prior acts as a strong bias, initializing and guiding the policy towards desirable behavior with a simple set of rewards. Compared to standalone MPC or end-to-end RL, our approach achieves higher sample efficiency, converges to greater asymptotic rewards, expands the range of trackable velocity commands, and enables zero-shot adaptation to unseen gaits and uneven terrain.
CusADi: A GPU Parallelization Framework for Symbolic Expressions and Optimal Control
Aug 19, 2024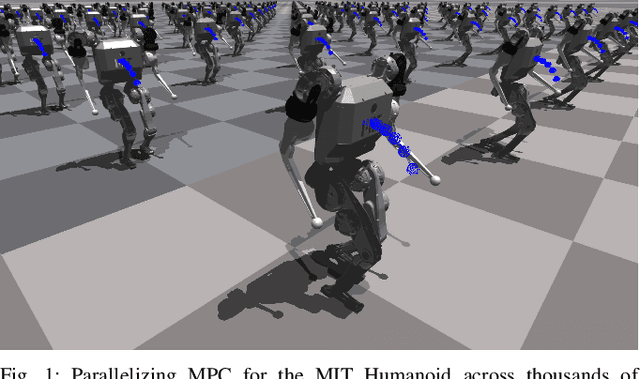
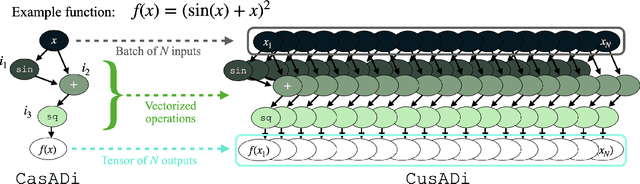
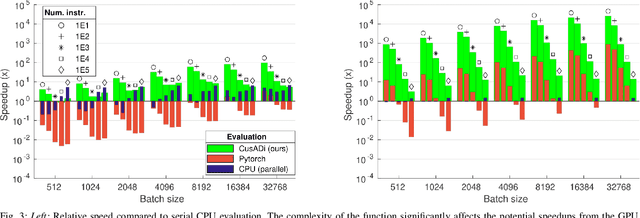
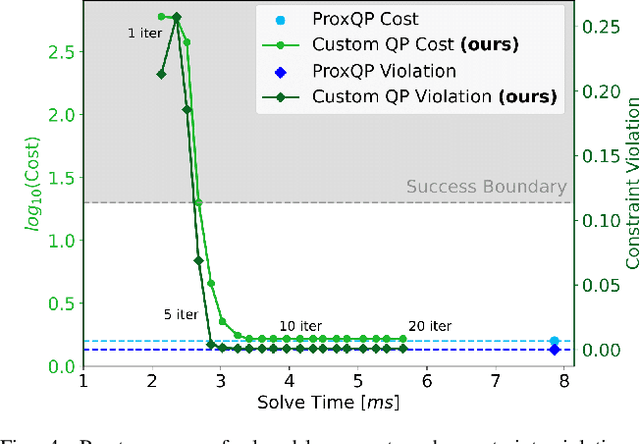
The parallelism afforded by GPUs presents significant advantages in training controllers through reinforcement learning (RL). However, integrating model-based optimization into this process remains challenging due to the complexity of formulating and solving optimization problems across thousands of instances. In this work, we present CusADi, an extension of the CasADi symbolic framework to support the parallelization of arbitrary closed-form expressions on GPUs with CUDA. We also formulate a closed-form approximation for solving general optimal control problems, enabling large-scale parallelization and evaluation of MPC controllers. Our results show a ten-fold speedup relative to similar MPC implementation on the CPU, and we demonstrate the use of CusADi for various applications, including parallel simulation, parameter sweeps, and policy training.
Integrating Model-Based Footstep Planning with Model-Free Reinforcement Learning for Dynamic Legged Locomotion
Aug 05, 2024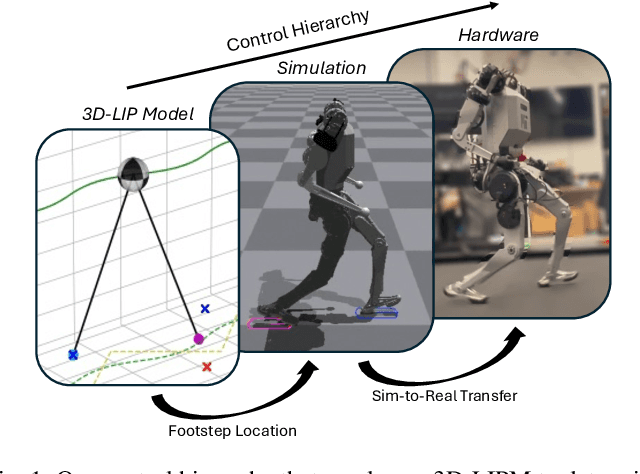
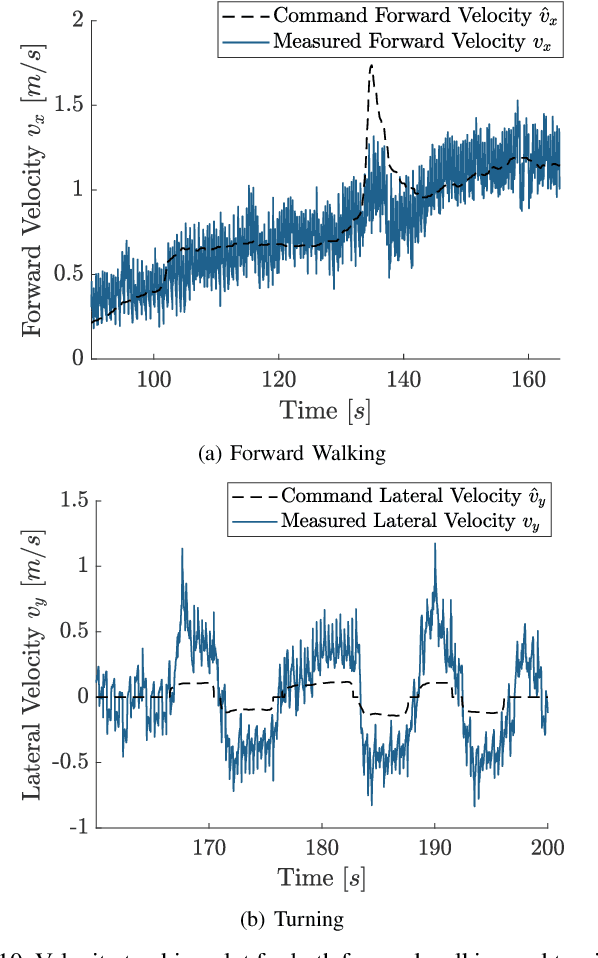
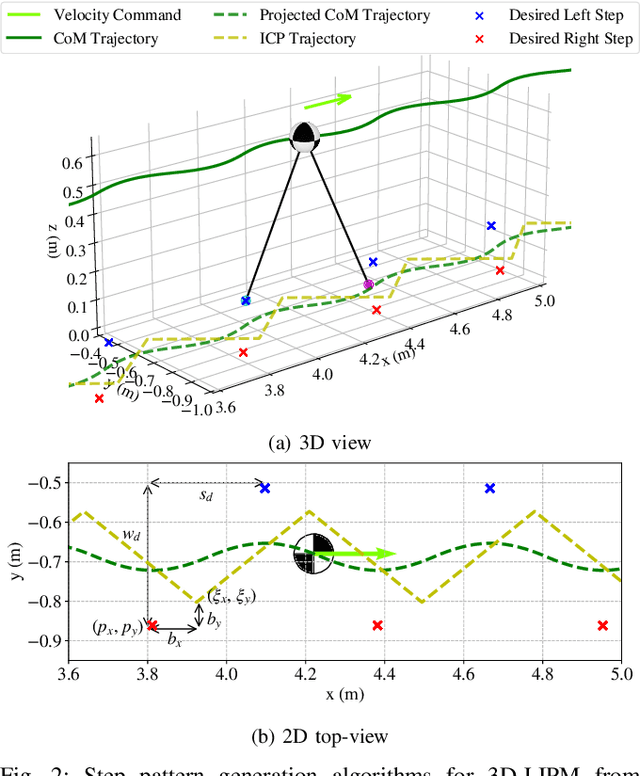
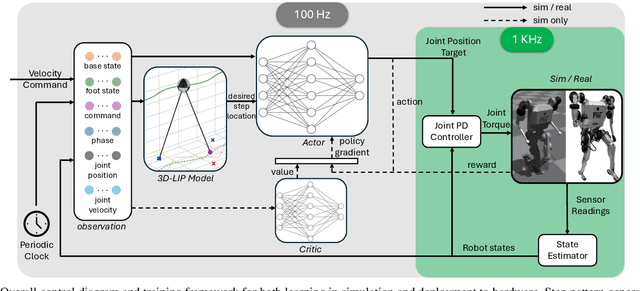
In this work, we introduce a control framework that combines model-based footstep planning with Reinforcement Learning (RL), leveraging desired footstep patterns derived from the Linear Inverted Pendulum (LIP) dynamics. Utilizing the LIP model, our method forward predicts robot states and determines the desired foot placement given the velocity commands. We then train an RL policy to track the foot placements without following the full reference motions derived from the LIP model. This partial guidance from the physics model allows the RL policy to integrate the predictive capabilities of the physics-informed dynamics and the adaptability characteristics of the RL controller without overfitting the policy to the template model. Our approach is validated on the MIT Humanoid, demonstrating that our policy can achieve stable yet dynamic locomotion for walking and turning. We further validate the adaptability and generalizability of our policy by extending the locomotion task to unseen, uneven terrain. During the hardware deployment, we have achieved forward walking speeds of up to 1.5 m/s on a treadmill and have successfully performed dynamic locomotion maneuvers such as 90-degree and 180-degree turns.