 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStrain in Sound: Soft Corrugated Tube for Local Strain Sensing with Acoustic Resonance
Apr 21, 2026We present a soft corrugated tube sensor designed to estimate strain in each half segment. When air flows through the tube, the internal corrugated cavities induce pressure oscillations that excite the tube's standing wave resonance mode, generating an acoustic tone. Stretching the tube affects both the resonance mode frequency, due to changes in overall length, and the frequency-flow speed relationship, due to variations in cavity width, which is particularly useful for local strain estimation. By sweeping flow rates in a controlled manner, we collected resonance frequency data across flow speeds under various local stretch conditions, enabling a machine learning algorithm (gradient boosting regressor) to estimate segmental strain with high accuracy. The dual-period tube design (3.1 mm and 4.18 mm corrugation periods) achieved a mean absolute error (MAE) of 0.8 mm, while the single-period tube (3.1 mm) provided a satisfactory MAE of 1 mm. Testing on a mannequin finger demonstrated the sensor's capability to differentiate multi-joint configurations, showing its potential for estimating non-uniform deformations in soft bodies.
CoinFT: A Coin-Sized, Capacitive 6-Axis Force Torque Sensor for Robotic Applications
Mar 25, 2025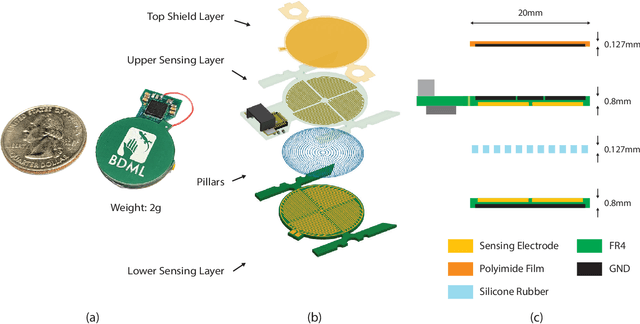
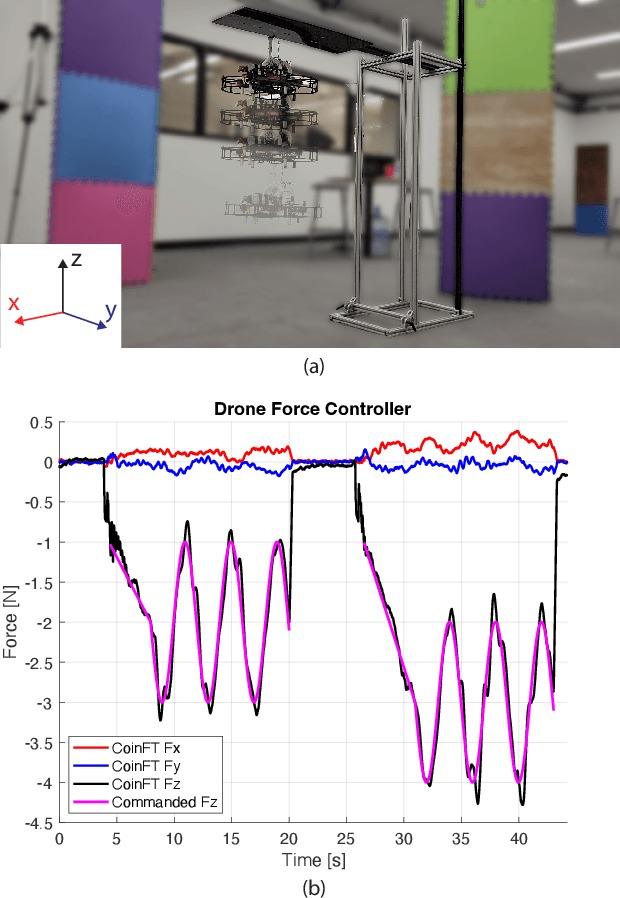
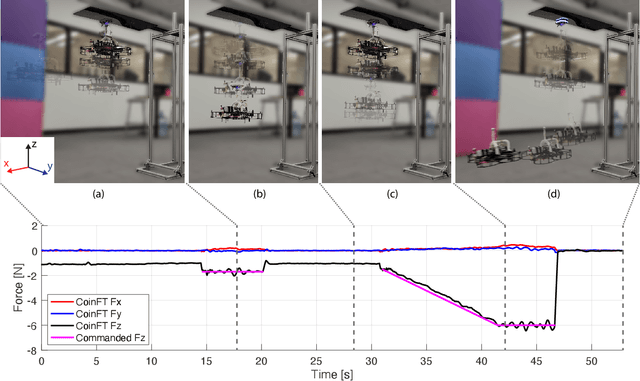
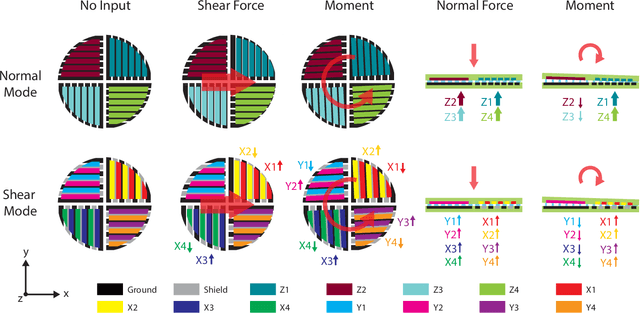
We introduce CoinFT, a capacitive 6-axis force/torque (F/T) sensor that is compact, light, low-cost, and robust with an average mean-squared error of 0.11N for force and 0.84mNm for moment when the input ranges from 0~10N and 0~4N in normal and shear directions, respectively. CoinFT is a stack of two rigid PCBs with comb-shaped electrodes connected by an array of silicone rubber pillars. The microcontroller interrogates the electrodes in different subsets in order to enhance sensitivity for measuring 6-axis F/T. The combination of desirable features of CoinFT enables various contact-rich robot interactions at a scale, across different embodiment domains including drones, robot end-effectors, and wearable haptic devices. We demonstrate the utility of CoinFT on drones by performing an attitude-based force control to perform tasks that require careful contact force modulation. The design, fabrication, and firmware of CoinFT are open-sourced at https://hojung-choi.github.io/coinft.github.io/.
Two-Finger Soft Gripper Force Modulation via Kinesthetic Feedback
Oct 01, 2024We investigate a method to modulate contact forces between the soft fingers of a two-finger gripper and an object, without relying on tactile sensors. This work is a follow-up to our previous results on contact detection. Here, our hypothesis is that once the contact between a finger and an object is detected, a controller that keeps a desired difference between the finger bending measurement and its bending at the moment of contact is sufficient to maintain and modulate the contact force. This approach can be simultaneously applied to both fingers while getting in contact with a single object. We successfully tested the hypothesis, and characterized the contact and peak pull-out force magnitude vs. the desired difference expressed by a multiplicative factor. All of the results are performed on a real physical device.
Haptic search with the Smart Suction Cup on adversarial objects
Sep 14, 2023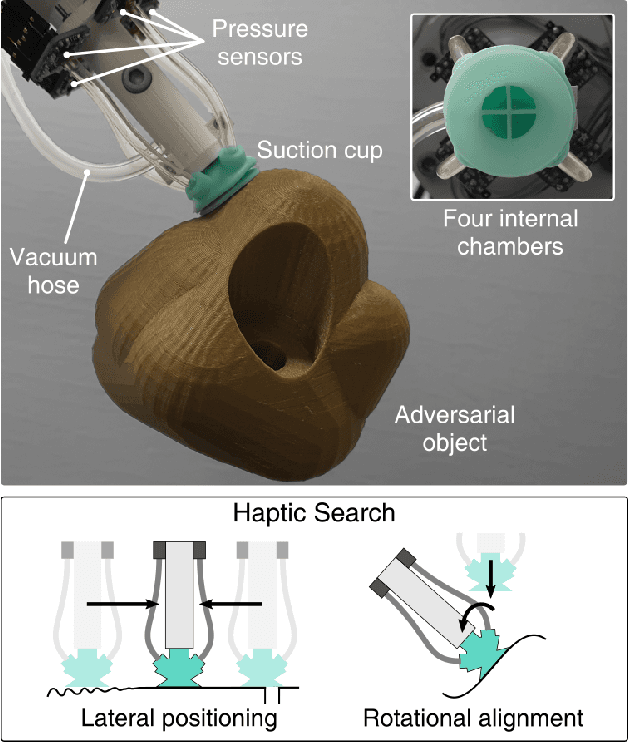
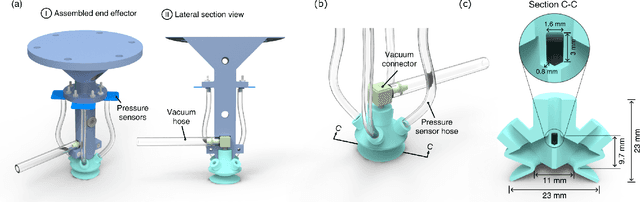
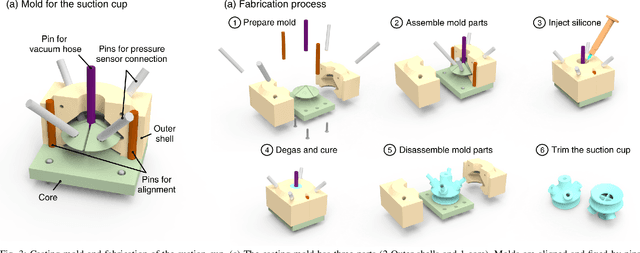
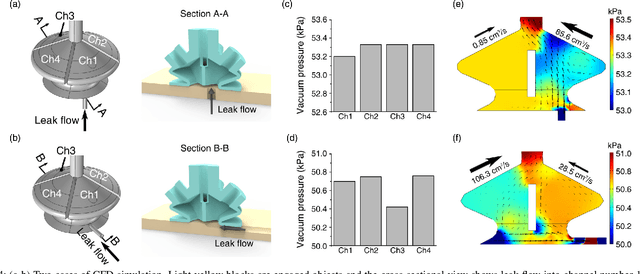
Suction cups are an important gripper type in industrial robot applications, and prior literature focuses on using vision-based planners to improve grasping success in these tasks. Vision-based planners can fail due to adversarial objects or lose generalizability for unseen scenarios, without retraining learned algorithms. We propose haptic exploration to improve suction cup grasping when visual grasp planners fail. We present the Smart Suction Cup, an end-effector that utilizes internal flow measurements for tactile sensing. We show that model-based haptic search methods, guided by these flow measurements, improve grasping success by up to 2.5x as compared with using only a vision planner during a bin-picking task. In characterizing the Smart Suction Cup on both geometric edges and curves, we find that flow rate can accurately predict the ideal motion direction even with large postural errors. The Smart Suction Cup includes no electronics on the cup itself, such that the design is easy to fabricate and haptic exploration does not damage the sensor. This work motivates the use of suction cups with autonomous haptic search capabilities in especially adversarial scenarios.
A Multi-Chamber Smart Suction Cup for Adaptive Gripping and Haptic Exploration
May 05, 2021
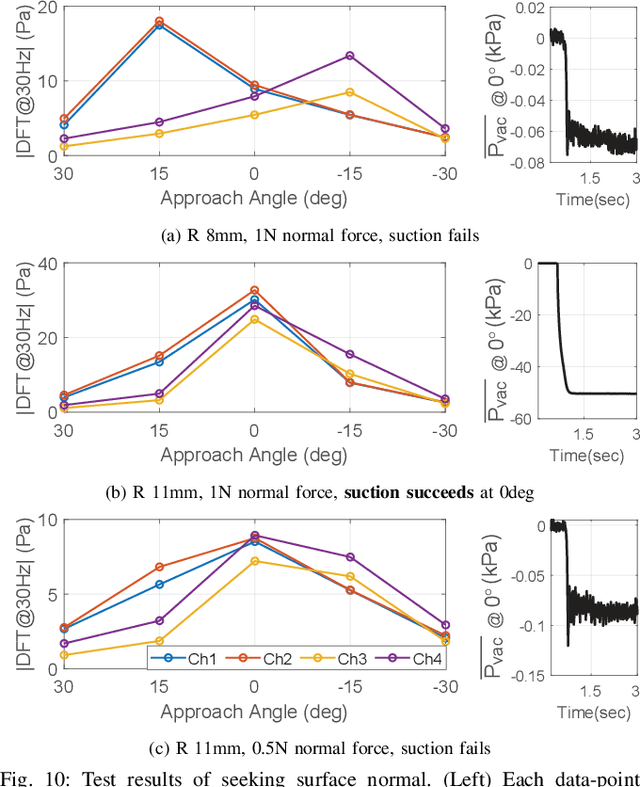

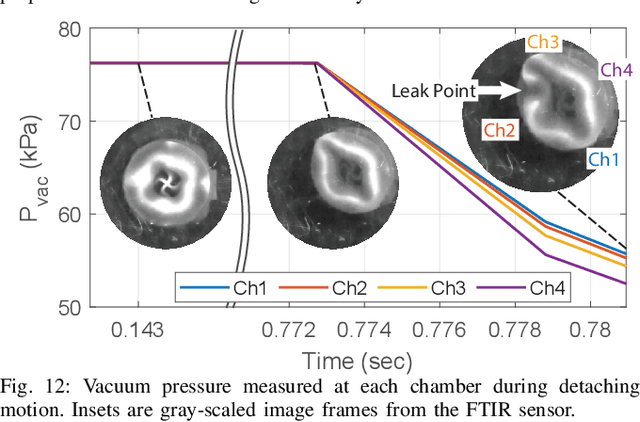
We present a novel robot end-effector for gripping and haptic exploration. Tactile sensing through suction flow monitoring is applied to a new suction cup design that contains multiple chambers for air flow. Each chamber connects with its own remote pressure transducer, which enables both absolute and differential pressure measures between chambers. By changing the overall vacuum applied to this smart suction cup, it can perform different functions such as gentle haptic exploration (low pressure) and monitoring breaks in the seal during strong astrictive gripping (high pressure). Haptic exploration of surfaces through sliding and palpation can guide the selection of suction grasp locations and help to identify the local surface geometry. During suction gripping, this design localizes breaks in the suction seal between four quadrants with up to 97% accuracy and detects breaks in the suction seal early enough to avoid total grasp failure.