 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGentle Object Retraction in Dense Clutter Using Multimodal Force Sensing and Imitation Learning
Aug 26, 2025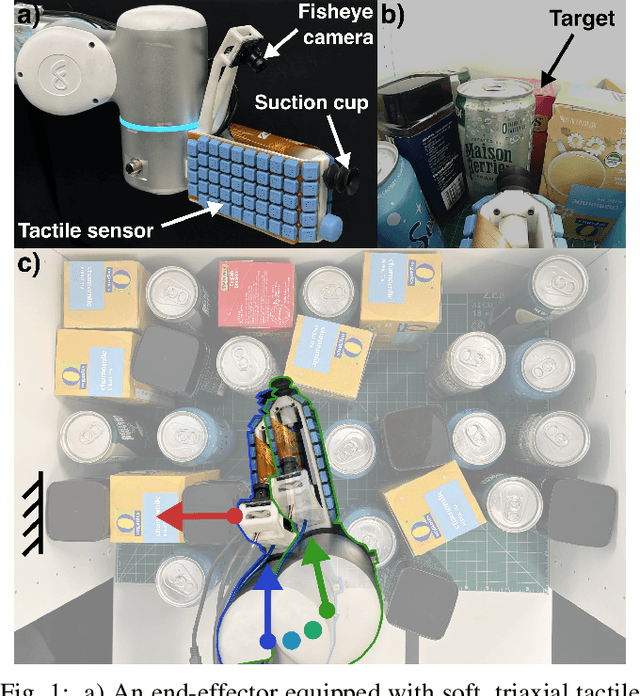
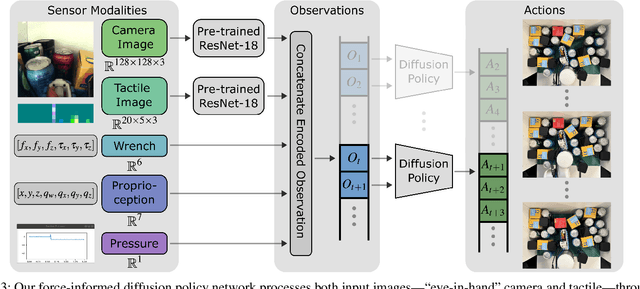
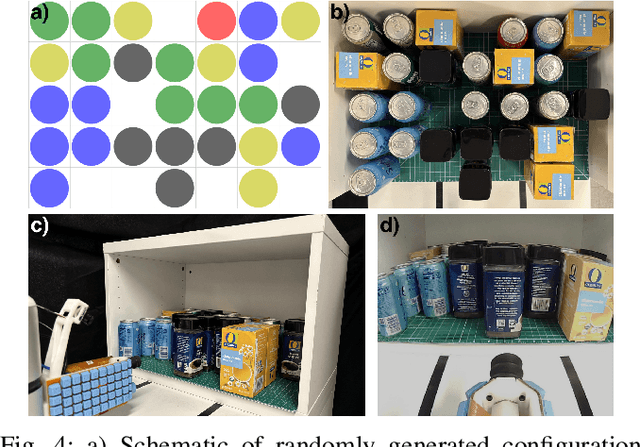
Dense collections of movable objects are common in everyday spaces -- from cabinets in a home to shelves in a warehouse. Safely retracting objects from such collections is difficult for robots, yet people do it easily, using non-prehensile tactile sensing on the sides and backs of their hands and arms. We investigate the role of such sensing for training robots to gently reach into constrained clutter and extract objects. The available sensing modalities are (1) "eye-in-hand" vision, (2) proprioception, (3) non-prehensile triaxial tactile sensing, (4) contact wrenches estimated from joint torques, and (5) a measure of successful object acquisition obtained by monitoring the vacuum line of a suction cup. We use imitation learning to train policies from a set of demonstrations on randomly generated scenes, then conduct an ablation study of wrench and tactile information. We evaluate each policy's performance across 40 unseen environment configurations. Policies employing any force sensing show fewer excessive force failures, an increased overall success rate, and faster completion times. The best performance is achieved using both tactile and wrench information, producing an 80% improvement above the baseline without force information.
Tactile-Informed Action Primitives Mitigate Jamming in Dense Clutter
Feb 14, 2024



It is difficult for robots to retrieve objects in densely cluttered lateral access scenes with movable objects as jamming against adjacent objects and walls can inhibit progress. We propose the use of two action primitives -- burrowing and excavating -- that can fluidize the scene to un-jam obstacles and enable continued progress. Even when these primitives are implemented in an open loop manner at clock-driven intervals, we observe a decrease in the final distance to the target location. Furthermore, we combine the primitives into a closed loop hybrid control strategy using tactile and proprioceptive information to leverage the advantages of both primitives without being overly disruptive. In doing so, we achieve a 10-fold increase in success rate above the baseline control strategy and significantly improve completion times as compared to the primitives alone or a naive combination of them.