 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Learning-based Planning for Continuous High-Dimensional POMDPs
Dec 17, 2021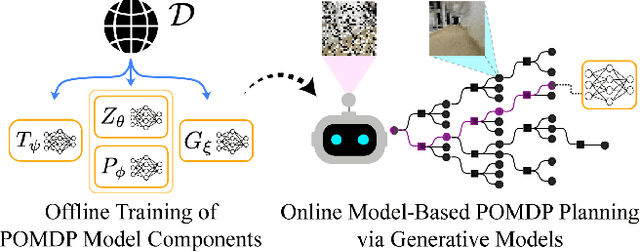
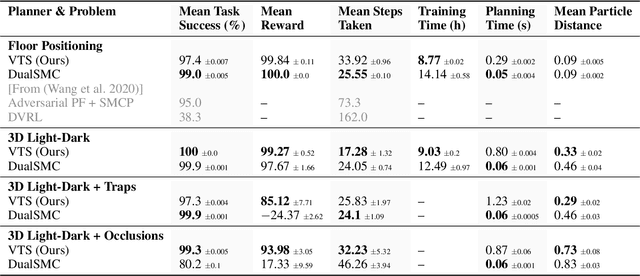
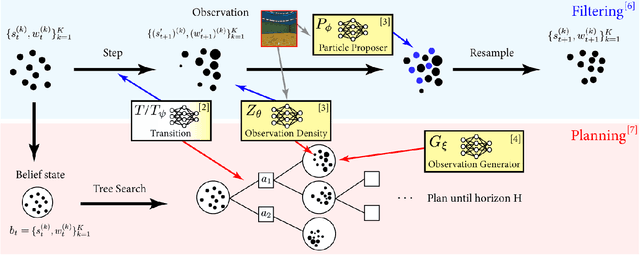
The Partially Observable Markov Decision Process (POMDP) is a powerful framework for capturing decision-making problems that involve state and transition uncertainty. However, most current POMDP planners cannot effectively handle very high-dimensional observations they often encounter in the real world (e.g. image observations in robotic domains). In this work, we propose Visual Tree Search (VTS), a learning and planning procedure that combines generative models learned offline with online model-based POMDP planning. VTS bridges offline model training and online planning by utilizing a set of deep generative observation models to predict and evaluate the likelihood of image observations in a Monte Carlo tree search planner. We show that VTS is robust to different observation noises and, since it utilizes online, model-based planning, can adapt to different reward structures without the need to re-train. This new approach outperforms a baseline state-of-the-art on-policy planning algorithm while using significantly less offline training time.
Quantifying Hypothesis Space Misspecification in Learning from Human-Robot Demonstrations and Physical Corrections
Feb 28, 2020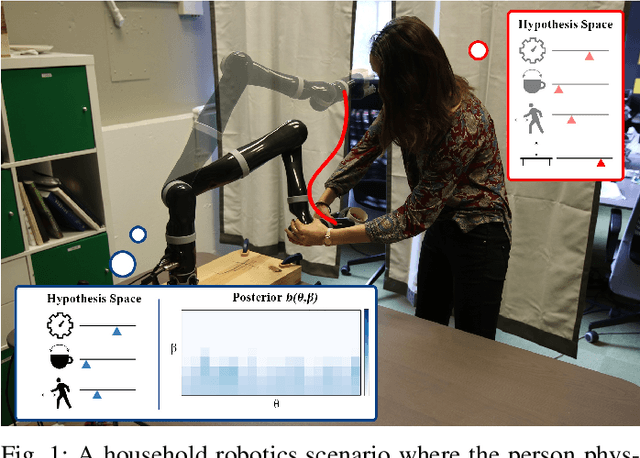
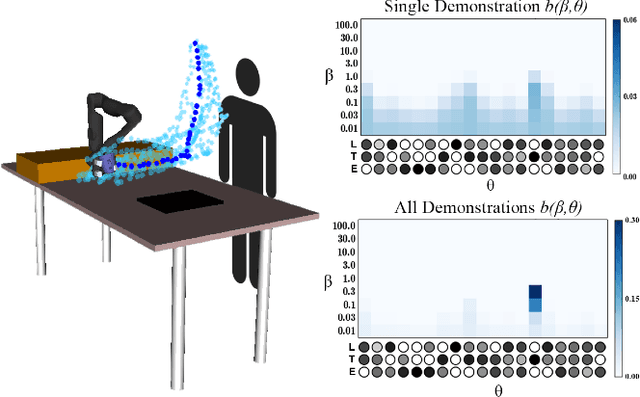
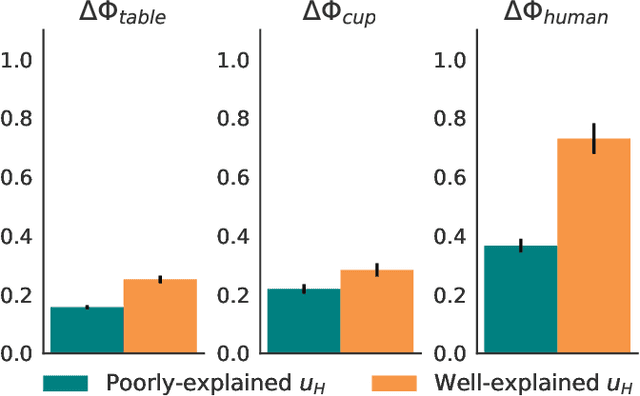
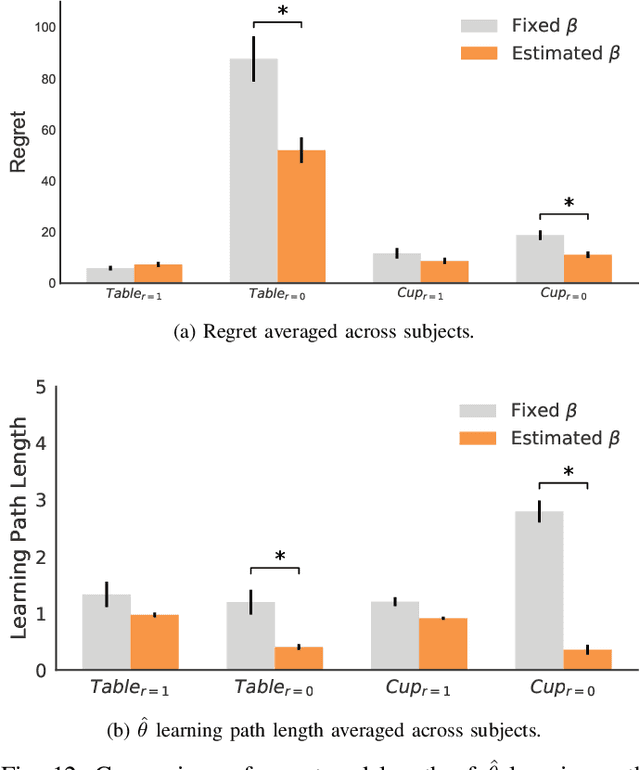
Human input has enabled autonomous systems to improve their capabilities and achieve complex behaviors that are otherwise challenging to generate automatically. Recent work focuses on how robots can use such input - like demonstrations or corrections - to learn intended objectives. These techniques assume that the human's desired objective already exists within the robot's hypothesis space. In reality, this assumption is often inaccurate: there will always be situations where the person might care about aspects of the task that the robot does not know about. Without this knowledge, the robot cannot infer the correct objective. Hence, when the robot's hypothesis space is misspecified, even methods that keep track of uncertainty over the objective fail because they reason about which hypothesis might be correct, and not whether any of the hypotheses are correct. In this paper, we posit that the robot should reason explicitly about how well it can explain human inputs given its hypothesis space and use that situational confidence to inform how it should incorporate human input. We demonstrate our method on a 7 degree-of-freedom robot manipulator in learning from two important types of human input: demonstrations of manipulation tasks, and physical corrections during the robot's task execution.
A Scalable Framework For Real-Time Multi-Robot, Multi-Human Collision Avoidance
Nov 14, 2018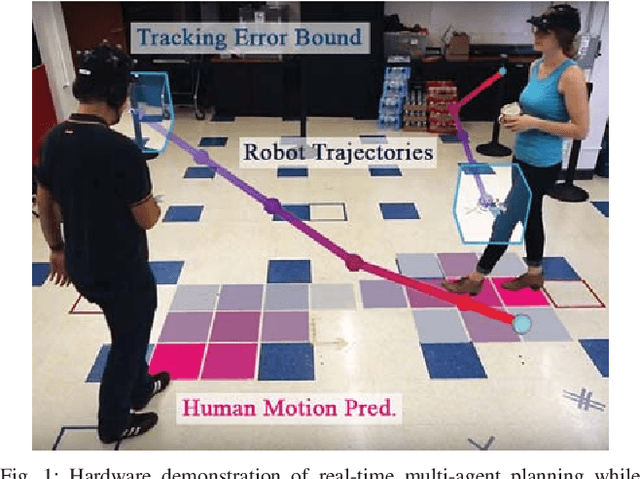
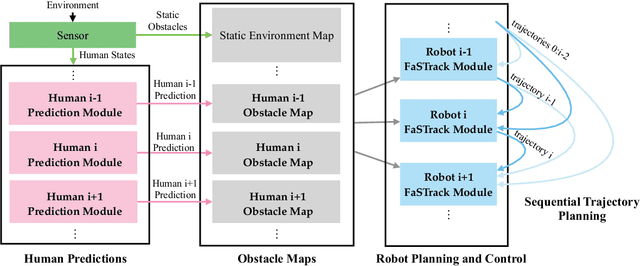
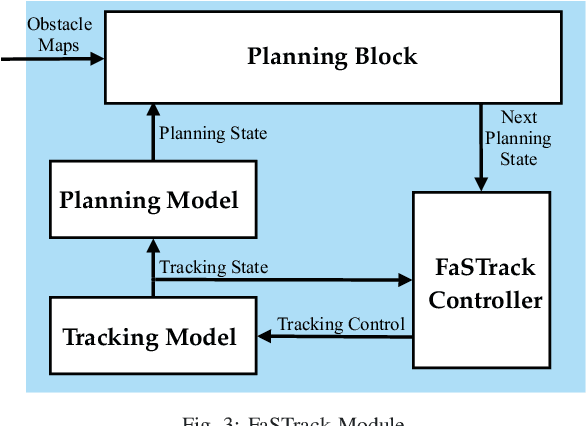
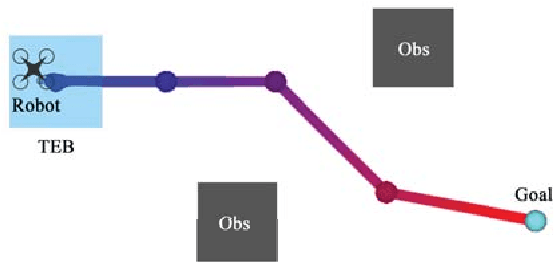
Robust motion planning is a well-studied problem in the robotics literature, yet current algorithms struggle to operate scalably and safely in the presence of other moving agents, such as humans. This paper introduces a novel framework for robot navigation that accounts for high-order system dynamics and maintains safety in the presence of external disturbances, other robots, and non-deterministic intentional agents. Our approach precomputes a tracking error margin for each robot, generates confidence-aware human motion predictions, and coordinates multiple robots with a sequential priority ordering, effectively enabling scalable safe trajectory planning and execution. We demonstrate our approach in hardware with two robots and two humans. We also showcase our work's scalability in a larger simulation.