 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePALM: A Dataset and Baseline for Learning Multi-subject Hand Prior
Nov 07, 2025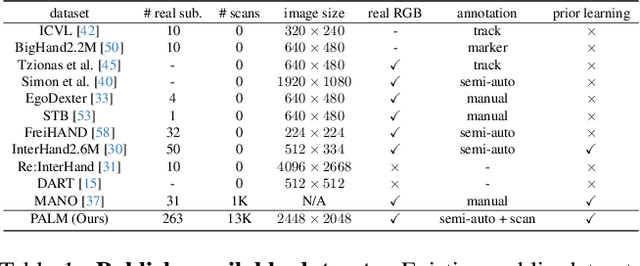
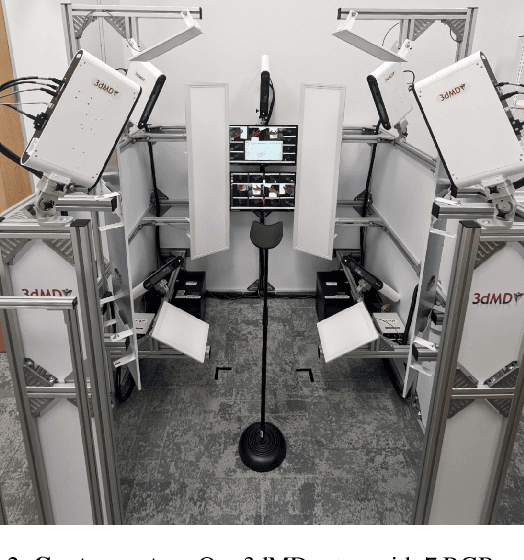
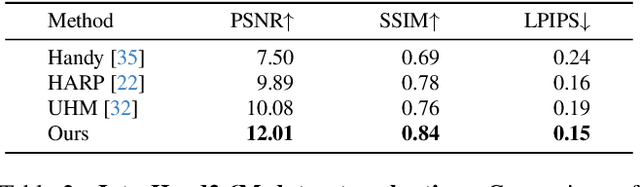
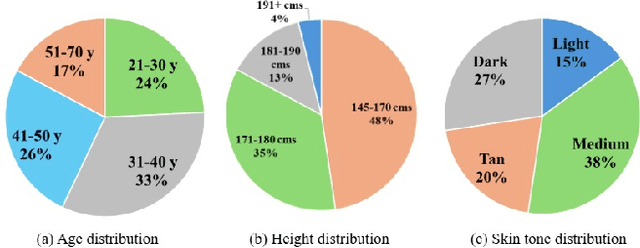
The ability to grasp objects, signal with gestures, and share emotion through touch all stem from the unique capabilities of human hands. Yet creating high-quality personalized hand avatars from images remains challenging due to complex geometry, appearance, and articulation, particularly under unconstrained lighting and limited views. Progress has also been limited by the lack of datasets that jointly provide accurate 3D geometry, high-resolution multiview imagery, and a diverse population of subjects. To address this, we present PALM, a large-scale dataset comprising 13k high-quality hand scans from 263 subjects and 90k multi-view images, capturing rich variation in skin tone, age, and geometry. To show its utility, we present a baseline PALM-Net, a multi-subject prior over hand geometry and material properties learned via physically based inverse rendering, enabling realistic, relightable single-image hand avatar personalization. PALM's scale and diversity make it a valuable real-world resource for hand modeling and related research.
GoTrack: Generic 6DoF Object Pose Refinement and Tracking
Jun 08, 2025We introduce GoTrack, an efficient and accurate CAD-based method for 6DoF object pose refinement and tracking, which can handle diverse objects without any object-specific training. Unlike existing tracking methods that rely solely on an analysis-by-synthesis approach for model-to-frame registration, GoTrack additionally integrates frame-to-frame registration, which saves compute and stabilizes tracking. Both types of registration are realized by optical flow estimation. The model-to-frame registration is noticeably simpler than in existing methods, relying only on standard neural network blocks (a transformer is trained on top of DINOv2) and producing reliable pose confidence scores without a scoring network. For the frame-to-frame registration, which is an easier problem as consecutive video frames are typically nearly identical, we employ a light off-the-shelf optical flow model. We demonstrate that GoTrack can be seamlessly combined with existing coarse pose estimation methods to create a minimal pipeline that reaches state-of-the-art RGB-only results on standard benchmarks for 6DoF object pose estimation and tracking. Our source code and trained models are publicly available at https://github.com/facebookresearch/gotrack
HuMoCon: Concept Discovery for Human Motion Understanding
May 27, 2025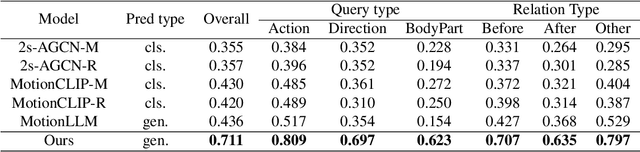
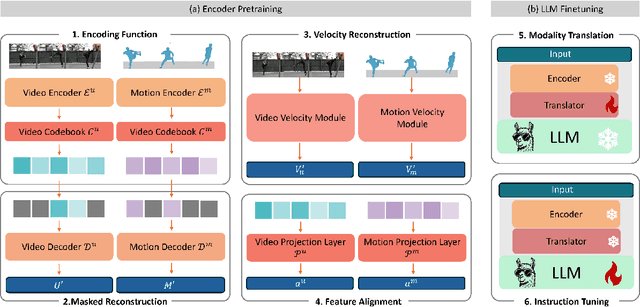
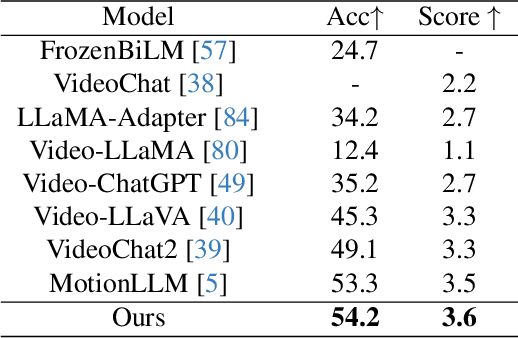
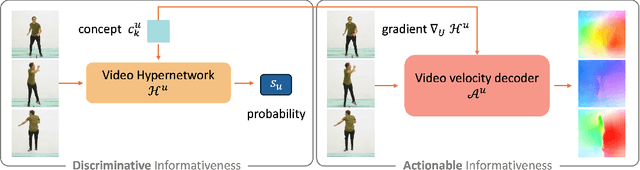
We present HuMoCon, a novel motion-video understanding framework designed for advanced human behavior analysis. The core of our method is a human motion concept discovery framework that efficiently trains multi-modal encoders to extract semantically meaningful and generalizable features. HuMoCon addresses key challenges in motion concept discovery for understanding and reasoning, including the lack of explicit multi-modality feature alignment and the loss of high-frequency information in masked autoencoding frameworks. Our approach integrates a feature alignment strategy that leverages video for contextual understanding and motion for fine-grained interaction modeling, further with a velocity reconstruction mechanism to enhance high-frequency feature expression and mitigate temporal over-smoothing. Comprehensive experiments on standard benchmarks demonstrate that HuMoCon enables effective motion concept discovery and significantly outperforms state-of-the-art methods in training large models for human motion understanding. We will open-source the associated code with our paper.
* 18 pages, 10 figures
HOIGPT: Learning Long Sequence Hand-Object Interaction with Language Models
Mar 24, 2025



We introduce HOIGPT, a token-based generative method that unifies 3D hand-object interactions (HOI) perception and generation, offering the first comprehensive solution for captioning and generating high-quality 3D HOI sequences from a diverse range of conditional signals (\eg text, objects, partial sequences). At its core, HOIGPT utilizes a large language model to predict the bidrectional transformation between HOI sequences and natural language descriptions. Given text inputs, HOIGPT generates a sequence of hand and object meshes; given (partial) HOI sequences, HOIGPT generates text descriptions and completes the sequences. To facilitate HOI understanding with a large language model, this paper introduces two key innovations: (1) a novel physically grounded HOI tokenizer, the hand-object decomposed VQ-VAE, for discretizing HOI sequences, and (2) a motion-aware language model trained to process and generate both text and HOI tokens. Extensive experiments demonstrate that HOIGPT sets new state-of-the-art performance on both text generation (+2.01% R Precision) and HOI generation (-2.56 FID) across multiple tasks and benchmarks.
CigTime: Corrective Instruction Generation Through Inverse Motion Editing
Dec 06, 2024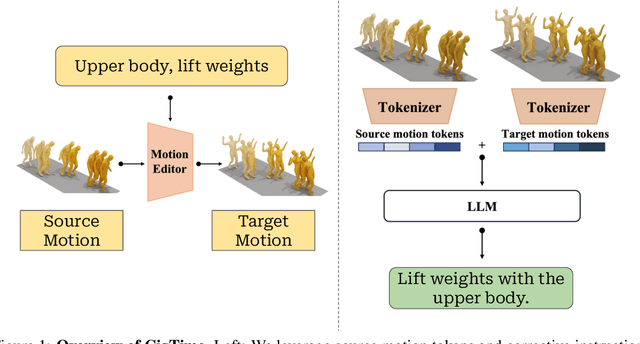
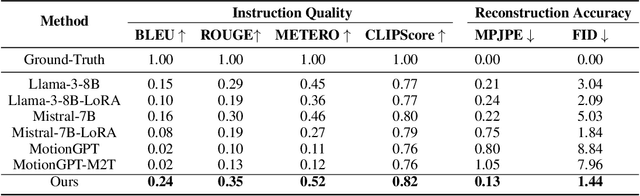
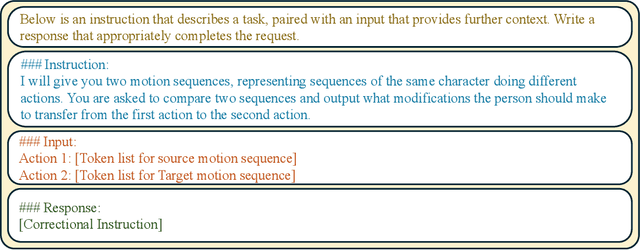
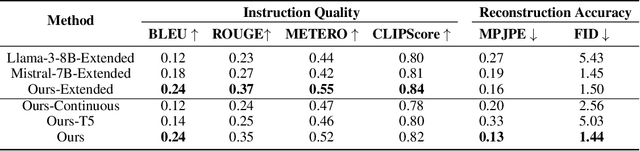
Recent advancements in models linking natural language with human motions have shown significant promise in motion generation and editing based on instructional text. Motivated by applications in sports coaching and motor skill learning, we investigate the inverse problem: generating corrective instructional text, leveraging motion editing and generation models. We introduce a novel approach that, given a user's current motion (source) and the desired motion (target), generates text instructions to guide the user towards achieving the target motion. We leverage large language models to generate corrective texts and utilize existing motion generation and editing frameworks to compile datasets of triplets (source motion, target motion, and corrective text). Using this data, we propose a new motion-language model for generating corrective instructions. We present both qualitative and quantitative results across a diverse range of applications that largely improve upon baselines. Our approach demonstrates its effectiveness in instructional scenarios, offering text-based guidance to correct and enhance user performance.
X-MIC: Cross-Modal Instance Conditioning for Egocentric Action Generalization
Mar 28, 2024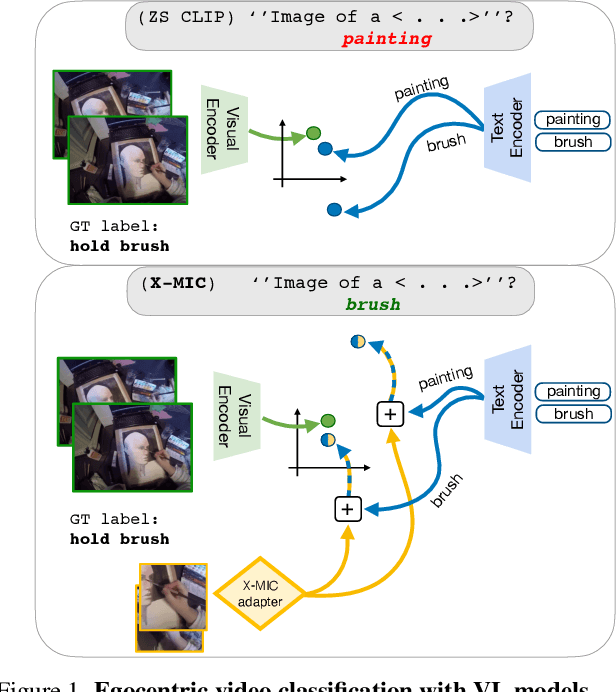
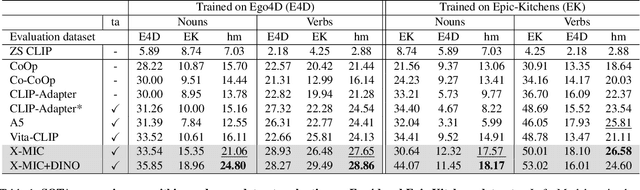
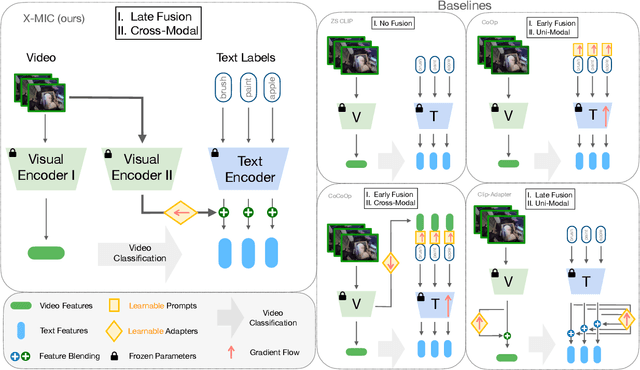
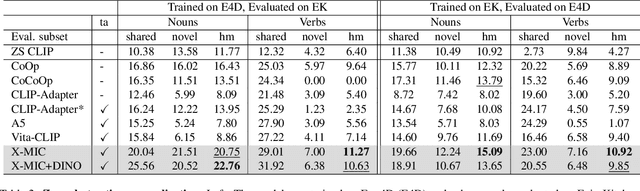
Lately, there has been growing interest in adapting vision-language models (VLMs) to image and third-person video classification due to their success in zero-shot recognition. However, the adaptation of these models to egocentric videos has been largely unexplored. To address this gap, we propose a simple yet effective cross-modal adaptation framework, which we call X-MIC. Using a video adapter, our pipeline learns to align frozen text embeddings to each egocentric video directly in the shared embedding space. Our novel adapter architecture retains and improves generalization of the pre-trained VLMs by disentangling learnable temporal modeling and frozen visual encoder. This results in an enhanced alignment of text embeddings to each egocentric video, leading to a significant improvement in cross-dataset generalization. We evaluate our approach on the Epic-Kitchens, Ego4D, and EGTEA datasets for fine-grained cross-dataset action generalization, demonstrating the effectiveness of our method. Code is available at https://github.com/annusha/xmic
DiffH2O: Diffusion-Based Synthesis of Hand-Object Interactions from Textual Descriptions
Mar 26, 2024



Generating natural hand-object interactions in 3D is challenging as the resulting hand and object motions are expected to be physically plausible and semantically meaningful. Furthermore, generalization to unseen objects is hindered by the limited scale of available hand-object interaction datasets. We propose DiffH2O, a novel method to synthesize realistic, one or two-handed object interactions from provided text prompts and geometry of the object. The method introduces three techniques that enable effective learning from limited data. First, we decompose the task into a grasping stage and a text-based interaction stage and use separate diffusion models for each. In the grasping stage, the model only generates hand motions, whereas in the interaction phase both hand and object poses are synthesized. Second, we propose a compact representation that tightly couples hand and object poses. Third, we propose two different guidance schemes to allow more control of the generated motions: grasp guidance and detailed textual guidance. Grasp guidance takes a single target grasping pose and guides the diffusion model to reach this grasp at the end of the grasping stage, which provides control over the grasping pose. Given a grasping motion from this stage, multiple different actions can be prompted in the interaction phase. For textual guidance, we contribute comprehensive text descriptions to the GRAB dataset and show that they enable our method to have more fine-grained control over hand-object interactions. Our quantitative and qualitative evaluation demonstrates that the proposed method outperforms baseline methods and leads to natural hand-object motions. Moreover, we demonstrate the practicality of our framework by utilizing a hand pose estimate from an off-the-shelf pose estimator for guidance, and then sampling multiple different actions in the interaction stage.
FoundPose: Unseen Object Pose Estimation with Foundation Features
Nov 30, 2023



We propose FoundPose, a method for 6D pose estimation of unseen rigid objects from a single RGB image. The method assumes that 3D models of the objects are available but does not require any object-specific training. This is achieved by building upon DINOv2, a recent vision foundation model with impressive generalization capabilities. An online pose estimation stage is supported by a minimal object representation that is built during a short onboarding stage from DINOv2 patch features extracted from rendered object templates. Given a query image with an object segmentation mask, FoundPose first rapidly retrieves a handful of similarly looking templates by a DINOv2-based bag-of-words approach. Pose hypotheses are then generated from 2D-3D correspondences established by matching DINOv2 patch features between the query image and a retrieved template, and finally optimized by featuremetric refinement. The method can handle diverse objects, including challenging ones with symmetries and without any texture, and noticeably outperforms existing RGB methods for coarse pose estimation in both accuracy and speed on the standard BOP benchmark. With the featuremetric and additional MegaPose refinement, which are demonstrated complementary, the method outperforms all RGB competitors. Source code is at: evinpinar.github.io/foundpose.
HoloAssist: an Egocentric Human Interaction Dataset for Interactive AI Assistants in the Real World
Sep 29, 2023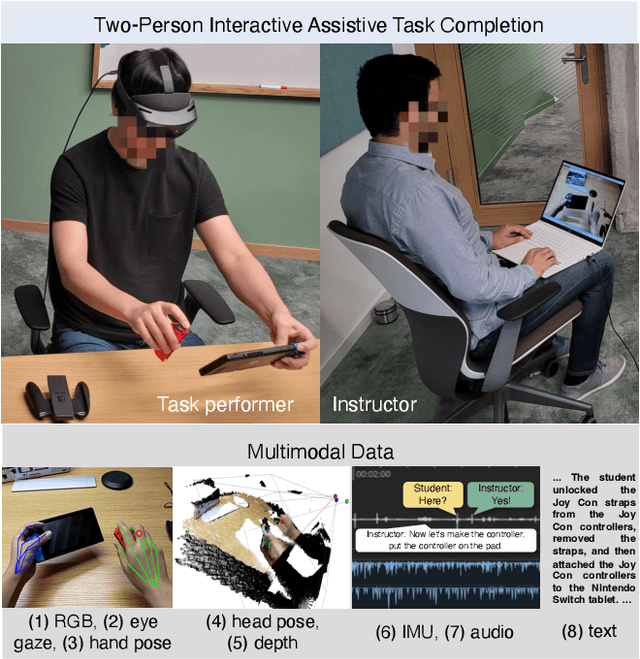

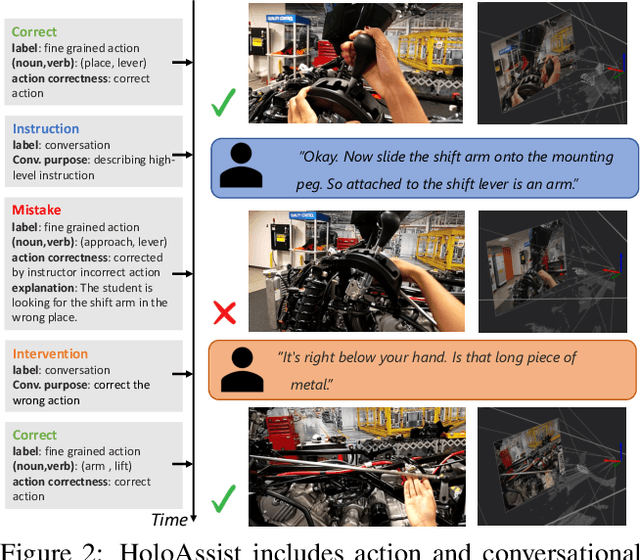

Building an interactive AI assistant that can perceive, reason, and collaborate with humans in the real world has been a long-standing pursuit in the AI community. This work is part of a broader research effort to develop intelligent agents that can interactively guide humans through performing tasks in the physical world. As a first step in this direction, we introduce HoloAssist, a large-scale egocentric human interaction dataset, where two people collaboratively complete physical manipulation tasks. The task performer executes the task while wearing a mixed-reality headset that captures seven synchronized data streams. The task instructor watches the performer's egocentric video in real time and guides them verbally. By augmenting the data with action and conversational annotations and observing the rich behaviors of various participants, we present key insights into how human assistants correct mistakes, intervene in the task completion procedure, and ground their instructions to the environment. HoloAssist spans 166 hours of data captured by 350 unique instructor-performer pairs. Furthermore, we construct and present benchmarks on mistake detection, intervention type prediction, and hand forecasting, along with detailed analysis. We expect HoloAssist will provide an important resource for building AI assistants that can fluidly collaborate with humans in the real world. Data can be downloaded at https://holoassist.github.io/.
Context-Aware Sequence Alignment using 4D Skeletal Augmentation
Apr 26, 2022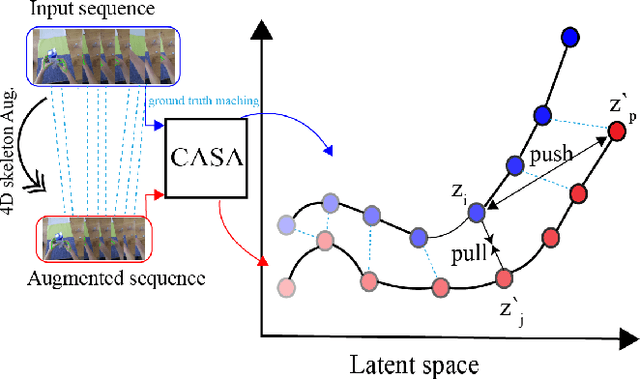
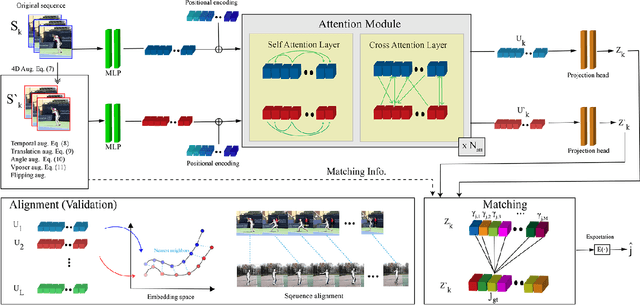
Temporal alignment of fine-grained human actions in videos is important for numerous applications in computer vision, robotics, and mixed reality. State-of-the-art methods directly learn image-based embedding space by leveraging powerful deep convolutional neural networks. While being straightforward, their results are far from satisfactory, the aligned videos exhibit severe temporal discontinuity without additional post-processing steps. The recent advancements in human body and hand pose estimation in the wild promise new ways of addressing the task of human action alignment in videos. In this work, based on off-the-shelf human pose estimators, we propose a novel context-aware self-supervised learning architecture to align sequences of actions. We name it CASA. Specifically, CASA employs self-attention and cross-attention mechanisms to incorporate the spatial and temporal context of human actions, which can solve the temporal discontinuity problem. Moreover, we introduce a self-supervised learning scheme that is empowered by novel 4D augmentation techniques for 3D skeleton representations. We systematically evaluate the key components of our method. Our experiments on three public datasets demonstrate CASA significantly improves phase progress and Kendall's Tau scores over the previous state-of-the-art methods.